Оптимизация параметров механизма натяжения-сдавания резинотросовой гусеничной ленты сельскохозяйственного трактора

Автор: Дмитрюк М.В., Кондаков С.В.
Рубрика: Расчет и конструирование
Статья в выпуске: 3 т.25, 2025 года.
Бесплатный доступ
В статье рассматривается актуальная проблема разработки отечественных гусеничных сельскохозяйственных тракторов мощностью свыше 350 л. с., в частности создание эффективного гидравлического эксцентрикового механизма натяжениясдавания гусеничной резинотросовой ленты. Отмечается, что в отечественном тракторостроении отсутствуют аналоги зарубежных моделей, таких как Challenger, Fendt и John Deere, где применяется гидравлический эксцентриковый механизм, обеспечивающий простоту натяжения, контроль давления и удобство обслуживания. Рассматриваемый механизм натяжениясдавания состоит из эксцентрикового рычага, гидроцилиндра, гидропневмоаккумулятора и блока коммутации. Данный механизм рассчитывается на работу при давлении 190–210 бар, что соответствует номинальному давлению в гидросистеме сельскохозяйственных тракторов. Блок коммутации, оснащенный датчиком давления, позволяет отслеживать состояние натяжения гусеничной ленты и оперативно информировать оператора о необходимости регулировки. В работе предложена методика расчёта механизма, основанная на решении системы треугольников, описывающих геометрию устройства с учётом угла установки эксцентрика β. Рассчитаны зависимости усилия натяжения и сдавания от угла β, а также параметры гидроцилиндра и гидропневмоаккумулятора, обеспечивающего амортизацию. Получена полная характеристика работы механизма, отражающая нелинейность усилий в зависимости от угла установки и растяжения гусеничной ленты. Выводы подчеркивают, что усилия в механизме являются нелинейными функциями, а задача оптимизации сводится к решению трансцендентной системы уравнений. Предложенная методика расчёта позволяет упростить и ускорить выбор оптимальных конструктивных решений, повысить надёжность и эксплуатационные характеристики ходовой части отечественных гусеничных тракторов, что важно для обеспечения продовольственной безопасности страны.
Сельскохозяйственный трактор, гусеничный трактор, механизм натяжения-сдавания, гидравлический механизм натяжения-сдавания, эксцентриковый механизм натяжения
Короткий адрес: https://sciup.org/147252225
IDR: 147252225 | УДК: 629.366 (631.372) | DOI: 10.14529/engin250301
Optimization of the parameters of the tensioning and releasing mechanism of the rubber-rope track belt of an agricultural tractor
The article considers the current problem of developing domestic tracked agricultural tractors with a capacity of over 350 hp, in particular, the creation of an effective hydraulic eccentric mechanism for tensioning and releasing the rubberrope track belt. It is noted that in domestic tractor manufacturing there are no analogues of foreign models, such as Challenger, Fendt and John Deere, which use a hydraulic eccentric mechanism that ensures ease of tensioning, pressure control and ease of maintenance. The considered tensioningreleasing mechanism consists of an eccentric lever, a hydraulic cylinder, a hydropneumatic accumulator and a switching unit. This mechanism is designed to operate at a pressure of 190–210 bar, which corresponds to the nominal pressure in the hydraulic system of agricultural tractors. The switching unit equipped with a pressure sensor allows you to monitor the state of the track tension and promptly inform the operator about the need for adjustment. The paper proposes a calculation method for the mechanism based on solving a system of triangles describing the geometry of the device taking into account the eccentric installation angle β. The dependences of the tension and release force on the angle β, as well as the parameters of the hydraulic cylinder and the hydropneumatic accumulator providing shock absorption, are calculated. A complete description of the mechanism operation is obtained, reflecting the nonlinearity of the forces depending on the installation angle and stretching of the track. The conclusions emphasize that the forces in the mechanism are nonlinear functions, and the optimization problem is reduced to solving a transcendental system of equations. The proposed calculation method allows to simplify and speed up the selection of optimal design solutions, improve the reliability and performance characteristics of the chassis of domestic tracked tractors, which is important for ensuring food security of the country.
Текст научной статьи Оптимизация параметров механизма натяжения-сдавания резинотросовой гусеничной ленты сельскохозяйственного трактора
Для обеспечения продовольственной безопасности страны необходимо создавать современные сельскохозяйственные трактора отечественного производства. В современном отечественном тракторостроении отсутствуют гусеничные трактора мощностью более 350 л. с. [1–4]. Таким образом, существует проблематика разработки, выпуска обоснования механизмов таких тракторов. Одним из сложных узлов гусеничного трактора является его ходовая система и её узлы [5– 13]. В данной статье предлагается рассмотреть описание механизма натяжения гусеничной резинотросовой ленты.
Анализ проблемы
В гусеничных сельскохозяйственных тракторах зарубежного производства – Challenger, Fendt, Jhon Deere [14–18] – наиболее популярным механизмом натяжения сдавания является гидравлический эксцентриковый механизм. Эксцентриковый гидравлический механизм натяжения- сдавания состоит из эксцентрикового рычага, гидроцилиндра, гидропневмоаккумулятора, блока коммутации (рис. 1).
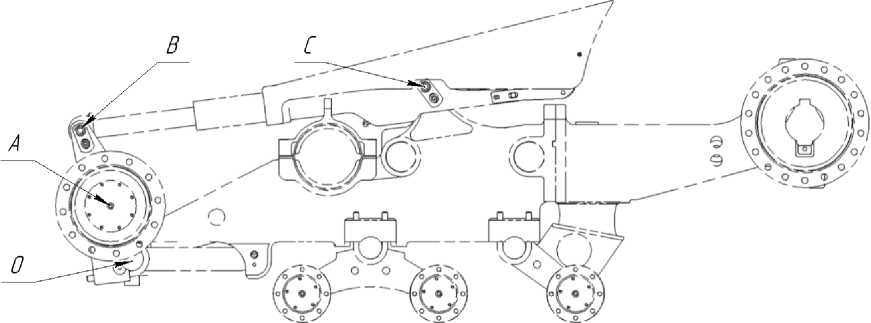
Рис. 1. Схема гидравлического механизма натяжения сельскохозяйственного трактора Challenger MT 700
Fig. 1. Schematic diagram of the hydraulic tensioning mechanism of the Challenger MT 700 agricultural tractor
Удобством данного механизма натяжения является простота натяжения гусеницы, контроля натяжения и низкие требования к квалификации персонала для ежедневного обслуживания и контроля. Натяжение гусеничной ленты осуществляется путем нагнетания гидравлической жидкости из рабочего контура гидравлики трактора, таким образом, номинальное давление натянутой гусеницы всегда соответствует номинальному давлению рабочего контура – 190…210 бар. Данный диапазон давлений является номинальным для сельскохозяйственных машин. Контроль натяжения осуществляется посредством датчика давления, расположенного в блоке коммутации, при снижении давления ниже номинального механизатор получает оповещение о необходимости натянуть гусеничную ленту.
Для проектирования гидравлического механизма натяжения необходимо учитывать следующие параметры:
-
1) требуемое усилие натяжения гусеницы;
-
2) усилие начала сдавания;
-
3) максимальное усилие сдавания;
-
4) величину предельного растяжения гусеничной ленты;
-
5) геометрическое положение шарниров гидроцилиндра;
-
6) геометрические параметры эксцентрика;
-
7) параметры гидропневмоаккумулятора.
Решение
Предлагаемый расчет позволяет за счет коррекции геометрических параметров эксцентрика и положения гидроцилиндра подобрать оптимальные из возможных параметров механизма натяжения и произвести перерасчет механизма в соответствии с реализованными компонентами механизма [19, 20].
Таким образом, схему механизма натяжения гусеничной ленты можно представить как комплекс из нескольких треугольников, которые необходимо решать совместно (рис. 2).
Поскольку угол α действия силы F гц, создаваемой гидроцилиндром, на эксцентрик не является постоянным, то усилие натяжения F н можно представить как функцию этого угла либо, что более информативно, как функцию угла установки эксцентрика относительно оси х, β , так как данный угол определяется конструктивно, имея, с одной стороны, ограничение установки колеса на уровень почвы, с другой стороны, установки отбойника, ограничивающего максимальную величину сдавания, Также конструктивно из условия длины гусеничной ленты известен угол β0 – номинальный угол установки эксцентрика, угол полностью натянутой гусеницы в состоянии поставки:
F h = f(P). (1)
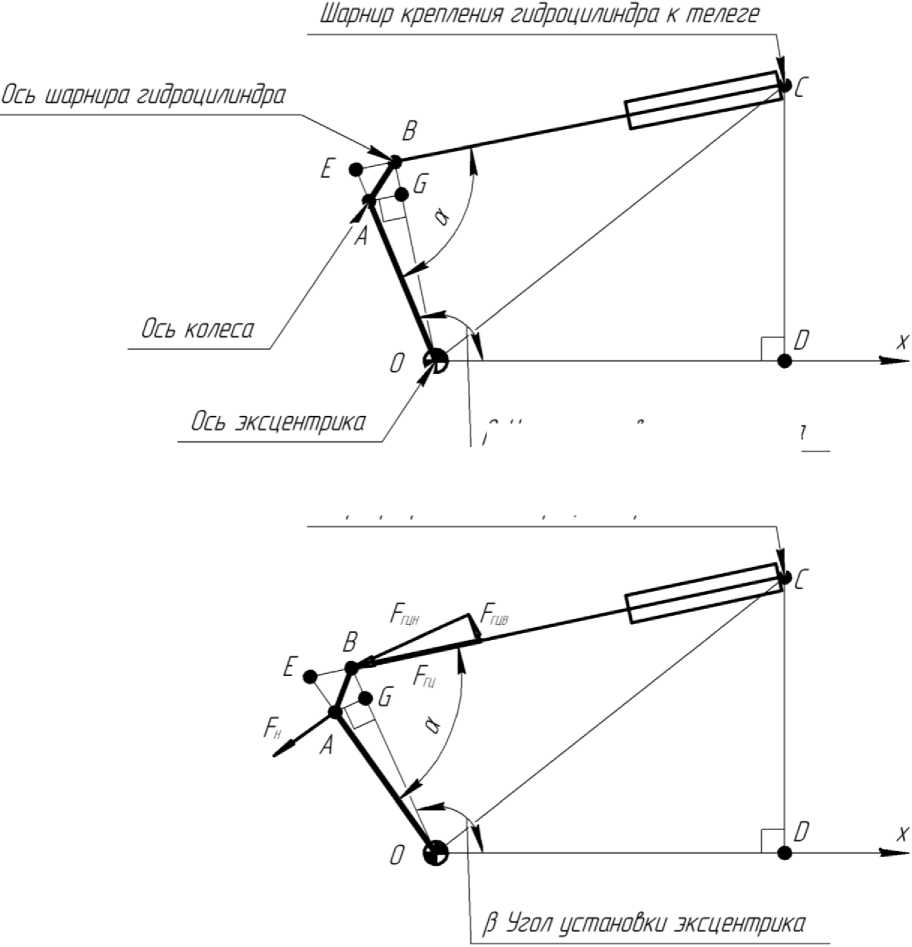
Рис. 2. Механизм натяжения, представленный в виде комплекса треугольников
Fig. 2. Tensioning mechanism represented as a complex of triangles
/7 Угол установки эксцентрика
Шарнир крепления гидроцилиндра к телеге
Решая систему треугольников OAB, GBA, COB, COD, представленных на рис. 2 в виде функции угла β, необходимо задаться параметрами длин отрезков OD, CD, OA, AG, GB . Данные отрезки определяются конструктивными особенностями механизма при проектировании, оптимизировать данные величины возможно только методом подбора из возможных вариантов. Так, решение сводится к совместному решению следующих зависимостей, определяющих геометрические параметры механизма в зависимости от угла β :
OϹ=√OD2 +CD2,
OG=√OA2 -AG2,
BϹ(β) = OϹ2+(OG+GB)2 -2OC∙(OG+GB)∙соѕ ( β-arctg S - arcsin
∠ OBC(β) = arccos
(OG+GB)2+ВС2 - ОС2
2∙(OG+GB)∙ВС(Р).
Функция BC ( β ) определяет длину гидроцилиндра в зависимости от углового положения эксцентрика. Функция угла OBC ( β ) определяет угол установки гидроцилиндра к эксцентрику натяжителя. Таким образом, усилие натяжения F н, создаваемое колесом
*н ( V )=— "oA— ^ гцн ( V ), (6) определяется через момент, создаваемый силой F гцн :
f гцн ( p )= f гц ∙ sin ∠ OBC ( P ), (7) которая является составляющей силы F гц, определяющейся диаметром гидроцилиндра D гц и номинальным давлением в гидросистеме P ном :
гц = 4 гц ∙0,1 ном. (8)
Из решения данных зависимостей получен график зависимости усилия натяжения от угла установки эксцентрика (рис. 3) в диапазоне рабочего хода, где точка А соответствует усилию натяжения для новой гусеничной ленты, а точка B соответствует максимальному допустимому растяжению гусеничной ленты.
Механизм натяжения также выполняет функцию механизма сдавания за счет объединения в одну гидролинию гидроцилиндра натяжения и гидропневмоаккумулятора, выполняющего функцию амортизации. Таким образом, необходимо рассчитать рекомендуемые параметры гидропневмоаккумулятора и пересчитать функцию усилия сдавания в соответствии с выбранным гидропневмоаккумулятором из каталога производителя. Рекомендуемый объем гидроаккумулятора рассчитывается из условия максимальной величины вытесняемого объема гидравлической жидкости из цилиндра при сдавании, усилия начала сдавания и усилия окончания сдавания, при расчете температура сред принята константой:
РLV1=Р2 (V 1 - Vʙг), (9) где РL – усилие начала сдавания, определяемое как 1,2 усилия натяжения; V1 – искомый объем гидроаккумулятора; Р2 – давление окончания сдавания; Vʙг – объем вытесняемой жидкости из гидроцилиндра.
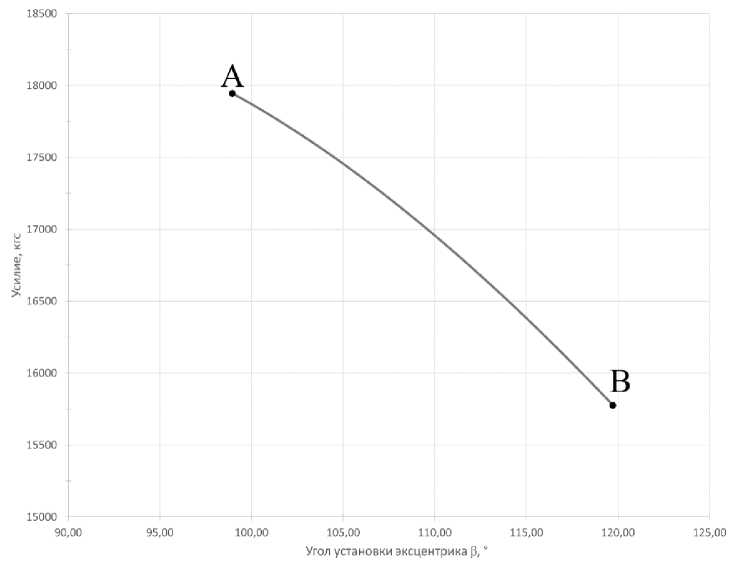
Рис. 3. Усилие натяжения в рабочем диапазоне
Fig. 3. Tension force in the working range
Получив рекомендуемые данные для подбора гидроаккумулятора, следует его пересчитать для уточнения данных по усилиям сдавания. При пересчете необходимо учесть, что усилие начала срабатывания, как и усилие окончания работы механизма сдавания, являются функцией угла установки эксцентрика β . Таким образом, совместное решение комплекса треугольников, усилий в механизме сдавания как функции угла установки эксцентрика механизма натяжения β , позволяет получить полную характеристику гидравлического механизма натяжения-сдавания гусеничной ленты (рис. 4).
* 20000
§ 19000
13000 -
10000 -
9000 60,00

С’А - -_ _
-
— -Рабочий диапазон натяжителя
== Усилие сдавания на максимальномвыдвижении натяжителя
= Усилие сдавания на новой гусеницы
Диапазон сил начала срабатывания сдавания
70,00 80,00 90,00 100,00 110,00 120,00
Угол установки эксцентрика р, *
Рис. 4. Характеристика гидравлического механизма натяжения-сдавания
Fig. 4. Characteristics of the hydraulic tension-release mechanism
На характеристике гидравлического механизма натяжения (см. рис. 4) представлена кривая AB, представляющая собой функцию усилия натяжения в зависимости от растяжения гусеничной ленты и, как следствие, изменяющегося угла установки эксцентрика β. Кривая CE определяет усилия начала срабатывания механизма сдавания в диапазоне рабочих углов установки эксцентрика β. Кривые CD и EF определяют изменение усилия в механизме сдавания от начала срабатывания до достижения углового ограничителя хода эксцентрика, определенного вертикальной линией DF, таким образом, зона ограниченная кривыми CDEF является зоной рабочих усилий механизма сдавания.
Выводы
-
1. Усилия в гидравлическом эксцентриковом механизме натяжения-сдавания являются нелинейными функциями, зависящими от угла установки эксцентрика и растяжения гусеничной ленты.
-
2. Задача оптимизации механизма натяжения является трансцендентной системой уравнений, результатом является выбор из множества подходящих решений.
-
3. Предложенная методика расчета позволяет получить характеристику работы проектируемого гидравлического эксцентрикового механизма натяжения-сдавания, позволяющую оценить его функциональность, упростить и ускорить выбор подходящих решений.
