Оптимизация привода захватного устройства харвестерной головки

Автор: Селиврстов А.А., Сюнв В.С.
Журнал: Resources and Technology @rt-petrsu
Статья в выпуске: 6, 2005 года.
Бесплатный доступ
Приводится методика оптимального выбора приводного гидроцилиндра захватного устройства (ЗУ) харвестерной головки.
Харвестерная головка, захватное устройство, гидроцилиндр
Короткий адрес: https://sciup.org/147112167
IDR: 147112167
Optimization of the harvester head grip device mechanism
Method of optimal choice a hydraulic cylinder for grip device of harvester head is discussed.
Текст научной статьи Оптимизация привода захватного устройства харвестерной головки
ПОСТАНОВКА ЗАДАЧИ
На современных харвестерных головках удержание дерева в процессе валки и последующего перемещения производится захватными рычагами, на концах которых агрегатируется протаскивающий механизм вальцового или гусеничного типов. Таким образом, рычаги захватного устройства (ЗУ) наряду с функцией удержания дерева выполняют функцию прижима протаскивающего устройства к стволу в процессе его подачи к сучкорезным ножам. Привод (закрытие и разведение) рычагов осуществляется гидроцилиндром двухстороннего действия.
Для того чтобы подобрать оптимальный гидроцилиндр привода рычагов ЗУ, необходимо определить следующие параметры:
е момент М 1, необходимый для надежного удержания дерева;
о момент Mg , развиваемый приводным гидроцилиндром.
Оптимальным будет только тот гидроцилиндр, у которого момент Mg больше момента М\ на всем диапазоне изменения диаметров обхватываемых де- ревьев от d0 до DQ , при этом момент Mg должен быть минимальным из всех возможных вариантов. Очевидно, что достичь полного совпадения максимального момента гидроцилиндра и максимально возможного потребного момента для всех положений захватных рычагов не удается из-за ограниченного числа варьируемых параметров, конструктивных ограничений и дискретности стандартного ряда типоразмеров гидроцилиндров.
Аналогично задаче, решаемой при проектировании манипулятора [2, 3], необходимо найти такие значения параметров механизма, при которых максимальное значение отношения развиваемого приводом момента к максимально возможному потребному моменту на всем диапазоне изменений диаметров было бы наименьшим, при условии, что это отношение не становится меньше единицы:
min(max ^^ -1 > 0)
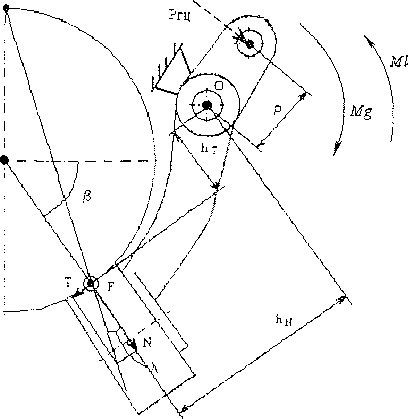
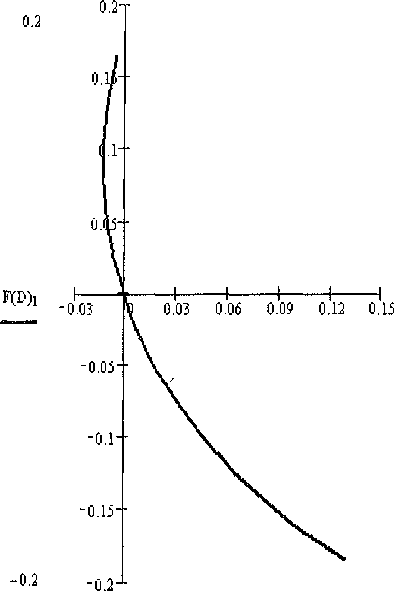
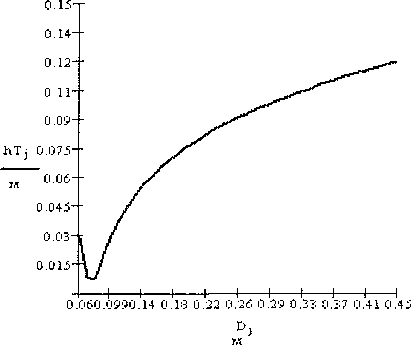
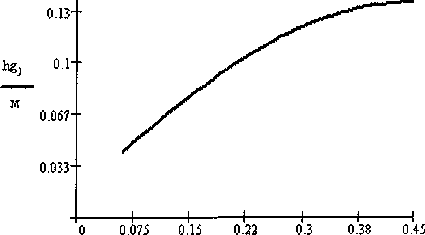
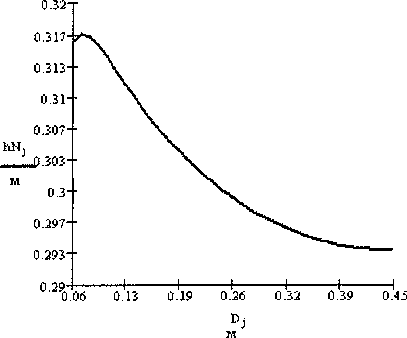
M1(D)s,d,x,y, (1)d0 Ml (D) - функция верхней границы моментов; 5 - ход штока гидроцилиндра; d - диаметр поршневой или штоковой полости гидроцилиндра; X, у - координаты подвеса опор гидроцилиндра и размеры элементарного рычажного механизма; D -- диапазон изменений диаметров деревьев. На управляемые параметры (компоненты векторов 5, d, X, у), исходя из конструктивных соображений и нормативных материалов, накладываются соответствующие областные и функциональные ограничения. Расчетная схема представленной задачи показана на рисунке 1. Для определения верхней границы моментов механизма управления рычагами рассчитывается потребный момент, действующий относительно шарнира соединения рычага и корпуса (точка О на рис. 2). Он действует в плоскости движения рычага, при этом наибольший момент будет соответствовать захвату дерева максимального диаметра. 1 Авторы - соответственно аспирант кафедры тяговых машин и д. т. н., профессор, заведуюирш кафедрой тяговых машин © Селиверстов А. А., Сюнёв В. С., 2005 Рис. 1. Расчетная схема АЛГОРИТМ РЕШЕНИЯ ЗАДАЧИ 1. Предварительные расчеты. Центр дерева максимального диаметра (точка Ох^Хо ’Уо, )) берется за начало системы координат ХО( ¥. Координаты точек MxA,yAY А' (ХА , уА) и О ( хО , уО ) известны (см. рис. 1). Для построения траектории движения точки контакта А захватного рычага с деревом необходимо построить окружность, проходящую через точку контакта рычага с деревом максимального диаметра А и точку контакта рычага с деревом минимального диаметра А'. Момент, развиваемый приводом, также действует в плоскости движения рычага и прижимает его вместе с вальцом к дереву (рис. 2). Рис. 2. Силы, действующие на захватный рычаг Поставленная задача успешно решается в среде пакета MathCAD. ИСХОДНЫЕ ПАРАМЕТРЫ Исходными являются следующие параметры: е максимальный диаметр захватываемого дерева D„ ; » минимальный диаметр захватываемого дерева dg; » угол обхвата (1 дерева максимального диаметра; • угол обхвата (X дерева минимального диа Координаты центра этой окружности Х^ и У] определяются из системы уравнений [IJ: г=у а )2, г = - х J2 + (У, - у А )2 , Dn где Г = 1.5--.(4) Траектория движения точки контакта А захватного рычага с деревом определяется из системы уравнений: Траектория движения точки А при заданных параметрах d0 — 0.06 м, D0 = 0.45 м, Р = 55 и а = 10° показана на рисунке 3. метра. Рис. 3. Траектория движения точки контакта А Изменение координаты центра дерева ОА (xa, у0 хО1у =0, Изменение угла обхвата деревьев: р у = arccos (хАХ; - хОхД 1ДаХ;. — хОХ Д2 + рДяг . -уохД2 Наименьший угол обхвата р'. соответствует углу обхвата дерева максимального диаметра р (см. рис. 1). Изменение плеча действия силы нормального давления рычага на ствол N равно: Шаг изменения диаметров деревьев от d^ до Dq . Например, если при dy = 0.06 м и D0 = 0.45 м задать изменение диаметра обхватываемых деревьев с шагом 0.01 м, тогда получим hN f = Дат, -^oi j.^i,- -^AXJ -хОхД-уАХ. - - хО • yAX j + у 01 у хО + + уО • хАХ j - хО 1 у ■ уО ДхАХ;-хОх Д л-ДАХ^уОх Д ’ откуда П = 39 ; j = 0..П; Изменение координаты точки А ^^А,У А^ запишется в следующем виде: Щ17. = F^DДо,(12) Щ17. = Е^рД.(13) где хО и уО - координаты точки О крепления рычага на корпусе харвестерной головки (см. рис. 1). Изменение плеча действия силы трения Т определяется: (хАХ ■ - хО 1 у ) ■ хО + (Щ1у - У 01у ) ■ хО 1 у • хАХ j - хАХ 2 + Л руОХ^уАу^уАХД •^(хАХ у - хО 1 у )2 + (уАХ j - у 01 v )2 Изменение угла X (см. рис. 2) равно: Изменение плеча действия усилия Ргц , развиваемого гидроцилиндром (см. рис. 2), (хАХ; ) (уАХ.-уОХ,.- (xAlj РО17 ' СхЛХо Длина рычага Lp при захвате дерева максимального диаметра определяется: Lp = <хО- хА У + (уО - уА У . (20) Длина рычага 1р при захвате дерева минимального диаметра равна: = ^хО-х'лУ +(уО-у'АУ . (21) причем Lp = lp . (22) Изменение угла поворота рычага при захвате деревьев у У = arccos Lp^V- -^xAXj-x^- -^yAXj-y^ 2 • Lp-lp hgj =p-cos(yv). (24) 2. Определение верхней границы моментов механизма управления рычагами MXj^Nj-hNj-Tj-hTj, (25) где N - максимальная потребная сила нормального давления рычага на ствол; Т - сила трения рычага о ствол; Верхняя граница моментов соответствует наиболее тяжелому режиму работы ЗУ. К таким режимам относятся: ® натяг дерева при срезании; « отрыв дерева от пня; ® наклон дерева в положение от машины; 3. Момент, развиваемый приводным гидроцилиндром: « подтаскивание дерева за комель к машине при волочащейся вершине. Сила трения рычага о ствол определится по следующей формуле: Tj - Nj • tanXz. (26) Mgj = С„ -hgj -Р -Ю6 -Пл-^. (27) где Faj - площадь поршневой или штоковой части гидроцилиндра. При работе гидроцилиндра поршневой полостью на обжим дерева D 2 порш ргЧ=^—4 • (28) При работе штоковой полостью г-, ^.L)nOfnu d шт) Fa; = л------ (29) р - давление в гидросистеме, Па; Т|Ю7Э = 0,95 - коэффициент полезного действия. На рисунке 4 представлен график зависимости момента, развиваемого гидроцилиндром, и верхней границы моментов от диаметра обхватываемого дерева при изменении последнего от d0 = 0.06 м до D0 = 0.45 м. Рис. 4. Момент, развиваемый гидроцилиндром, и верхняя граница моментов Рис. 6. Изменение плеча силы трения от диаметра дерева ВЫВОДЫ И РЕЗУЛЬТАТЫ 1. Предлагаемая методика позволяет подобрать оптимальный гидроцилиндр привода рычагов. Вследствие этого на протяжении всего технологического процесса заготовки древесины захватные рычаги будут надежно удерживать дерево, исключая его проскальзывание относительно захватных рычагов и корпуса харвестерной головки. 2. Наиболее тяжелым режимом работы захватного устройства является наклон дерева в положение от машины. 3. На рисунках 5, б, 7 представлены графики, которые показывают зависимости изменения соответствующих параметров от диаметра обхватываемого дерева, при изменении последнего от d0 = 0.06 м до D0 = 0.45 м. Рис. 7. Значение плеча действия усилия, развиваемого гидроцилиндром, от диаметра дерева Рис. 5. Изменение плеча силы нормального давления рычага на ствол дерева от диаметра дерева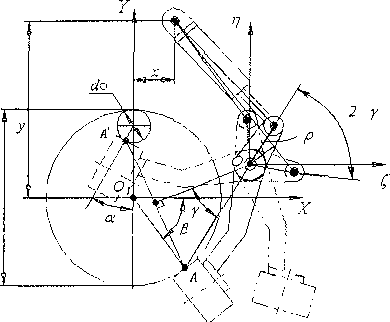



Список литературы Оптимизация привода захватного устройства харвестерной головки
- Выгодский М. Я. Справочник по высшей математике 11-е изд./М. Я. Выгодский. М.: Наука, 1976. 872 c.
- Герасимов Ю. Ю. Манипуляторные системы лесных машин: проектирование и расчет: Учебное пособие/Ю. Ю. Герасимов, С. А. Кильпеляйнен, В. М. Костюкевич, В. С. Сюнёв. Петрозаводск; Йоэнсуу, 1994. 96с.
- Герасимов Ю. Ю. Лесосечные машины для рубок ухода: компьютерная система принятия решений./Ю. Ю. Герасимов, В. С. Сюнёв. Петрозаводск: Изд-во ПетрГУ, 1998. 236 c.
