Оптимизация процесса коррекции ошибок в системе остаточных классов за счет применения китайской теоремы об остатках с дробными числами

Автор: Червяков Николай Иванович, Ляхов Павел Алексеевич, Бабенко Михаил Григорьевич, Лавриненко Ирина Николаевна, Лавриненко Антон Викторович, Назаров Антон Сергеевич, Аль-Гальда Сафват Чиад
Журнал: Инфокоммуникационные технологии @ikt-psuti
Рубрика: Теоретические основы технологий передачи и обработки информации и сигналов
Статья в выпуске: 2 т.16, 2018 года.
Бесплатный доступ
Представлены результаты оптимизации процесса определения ошибок и их коррекции, основанного на избыточной системе счисления в остатках, которая используется в компьютерных процессах обработки информации для повышения устойчивости при хранении, передаче или обработке. Предложенная оптимизация коррекции ошибок основана на применении новой формы китайской теоремы об остатках, которая отличается от классической тем, что в ней используются не целые числа, а дробные величины. Такой подход позволил значительно уменьшить вычислительную сложность при коррекции ошибок в процессорах, функционирующих в системе остаточных классов. Результаты моделирования показали высокую эффективность предложенного подхода по сравнению с известными методами, основанными на Китайской теореме об остатках и обобщённой позиционной системе счисления.
Модулярный процессор, алгоритм, китайская теорема об остатках, система остаточных классов, обобщенная позиционная система счисления, приближенный метод, дробные числа
Короткий адрес: https://sciup.org/140256179
IDR: 140256179 | УДК: 004.056.5 | DOI: 10.18469/ikt.2018.16.2.01
Application of Chinese remainder theorem with fractions to error correction process optimization in the residue number system
In this paper we present the results of error detection and correction optimization based on the redundant residue number system that is used in computer data processing due to its ability to increase the information stability during data transmission and processing. The proposed error correction optimization is based on the application of a new form of the Chinese Remainder Theorem, which differs from the classical one in that it uses non-integer numbers rather than fractional quantities. This approach allows to significantly reduce the computational complexity in the error correction for RNS operating processors. Such a processor is usually called a “modular processor”. The results of modeling show high efficiency of the proposed approach in comparison with the known methods based on the Chinese Remainder Theorem and Mixed Radix Conversion.
Текст научной статьи Оптимизация процесса коррекции ошибок в системе остаточных классов за счет применения китайской теоремы об остатках с дробными числами
На протяжении всего периода существования вычислительных систем главными целями процесса их развития, в конечном счете, были и остаются повышение их производительности и надежности [1-8]. Основным направлением к достижению этих целей является совершенствование технологии производства средств вычислительной техники и внедрение новых, более эффективных способов организации и проведения вычислений, то есть новых вычислительных структур, например, модулярных процессоров на основе системы остаточных классов (СОК) [2-4]. Анализ известных подходов, используемых при разработке высокопроизводительных и надежных модулярных процессоров, показывает, что все они имеют одну общую отличительную особенность, суть которой состоит в широком применении тех или иных форм параллельной обработки. В этой связи особый интерес представляют исследования по теории и практике разработки модулярных процессоров с параллельной обработкой данных, так как именно такие системы наилучшим образом приспособлены для параллельных вычислений.
Наиболее привлекательными в этом отношении являются вычислительные системы, функционирующие в СОК, обладающие максимальным уровнем внутреннего параллелизма, которые принято называть модулярными процессорами [1-4]. Алгебраическая структура остаточных кодов при введении избыточности позволяет обнаруживать, локализовывать и исправлять ошибки с гибким изменением корректирующих свойств без изменения способов кодирования [4; 9].
Проблема обеспечения эффективности и надежности функционирования вычислительных средств приобретает в настоящее время первостепенное значение, так как техническое обслуживание либо затруднено, либо совсем исключено в силу использования СБИС, имеющих 10 6 и более элементов.
В настоящее время разработку надежных вычислительных модулярных структур реализуют на основе использования СОК [10-14], обладающей высокой степенью однородности, что удачно сочетается со структурами FPGA. СОК активно применяется в цифровой обработке сигналов, системах спутниковой связи, криптографических структурах и др. [15-18]. Использование СОК и FPGA реализует высокую степень однородности, что позволяет существенно улучшить такой параметр, как живучесть [1]. Избыточное кодирование в СОК обеспечивает живучесть архитектуры даже в катастрофических ситуациях, когда поток неисправностей очень велик.
Целью данной работы является исследование, посвященное повышению эффективности определения и коррекции ошибки модулярного процессора. Кроме того, информация, полученная о номере отказавшего модуля, может быть использована для оптимального поиска реконфигурации процессора. Современные алгоритмы, разработанные для контроля ошибок и определения отказов модулярных каналов на основе применения обобщенной позиционной системы счисления (ОПСС), неспособны дать удовлетворительный результат по причине высокой сложности и малого быстродействия [1; 8]. В целях преодоления широко известных недостатков предлагается новый подход к коррекции ошибок на основе Китайской теоремы об остатках (КТО) с дробными числами. Классическая КТО использует целые числа [1; 8].
Введение в избыточную СОК
Сложность современных вычислительных устройств приводит к необходимости применения эффективных средств обнаружения и исправления ошибок, возникающих в результате появления неисправностей оборудования. Ошибки в машинных словах могут быть весьма эффективно обнаружены, если при кодировании этих слов применять метод информационной избыточности. Избыточная модулярная арифметика обладает свойствами, которые можно использовать для обнаружения и коррекции ошибок.
Если фиксированный ряд положительных попарно взаимнопростых чисел Р1,Р^-Р„ назвать основаниями (модулями) СОК, то под системой остаточных классов понимается такая непозиционная система счисления, в которой любое целое положительной число A представляется в виде набора остатков (вычетов) от деления представляемого числа на выбранные основания системы
А = (а1,а2,... ап)
то, в соответствии с КТО [1; 8], представление (1) является единственным, при условии 0где P = P\P.-Pn =Па определяет диапазон представления чисел [o.P-1], то есть существует единственное число 4e[0,P-l], для которого
A = a, (mod Pj), (3)
где a, – остаток от деления числа A на число Pi и является наименьшим неотрицательным представителем соответствующего класса вычетов по модулю Pi ■ Основным преимуществом такого представления является тот факт, что выполнение операций сложения, вычитания и умножения реализуется достаточно просто, по формуле
A*В = ^ava2,... a„Y^pvp2,... pnV
= ((«[ * Д )mod/?1,(a2 * P2 )mod^>2,.„ (4)
(«„ *A)mod^J где * обозначает одну из указанных операций: сложение, умножение или вычитание. Эти операции носят название модульных, так как для их выполнения в СОК достаточно одного такта обработки численных значений, причем эта обработка происходит параллельно, и величина числа в каждом разряде не зависит от других разрядов. Рассматриваемые ниже коды СОК могут быть использованы для коррекции ошибок, возникающих при передаче информации или выполнении арифметических операций.
Если в представление (1) добавить разряд ^n-\-\ • равный вычету по дополнительному модулю Pn+V' то получим
Далее будет использоваться обозначение R-Pp.1+i. Если представление (5) удовлетворяет условию где U, – наименьшие неотрицательные вычеты (остатки) числа по модулям Р^Р1’~ Р„- Цифры ai данного представления по выбранным модулям образуются следующим образом




|
k3 = - |
1/+, |
1/21 |
||
|
Рз 5 5 |
||||
ИЛ=И4
-» 0,142. 7
Тогда
f(_Av /Р[) = \а2к2 + а3к3 + а4к4^ =
= |1 • 0.666 + 3 • 0.2 + 3 • 0.1421, « 0,692 ;
F(P/ Pl ) = |77?3£3 + т4к4 1, =
= 11-0.2 + 6-0.1421, «0,052.
Так как 0,692 > 0,052, то F^Ai/PiY>F(P/PxY
Аналогичным образом вычислим проекции по основаниям Р2=^ р3=5 и р4=1.
По основанию Р2 = 3:
р(л2/Р2)= 11-0,5 + 3-0,8 + 3-0,714^ «0,042;
F(P/F) = |1-O,8 + 6-0,714|, «0,084.
Так как 0,042 < 0,084; то р(л/р2)<р(р/р2)
По основанию Рз = 5:
F(A3 /Р3)«11 ■ 0,5 +1 • 0,666 + 3 • 0,857|, « 0,737 ;
F(P/P3)=|6-0,857|, «0,142.
Так как 0,737 >0,142; то р(л3/р3)>р(р/р3)
По основанию Pa = 7 :
f(v44 / P4)«11 - 0,5 +1 • 0,333 + 3 • 0,2|, « 0,433 ; p(p/P4) = 11-0,2|, =0.2.
Так как 0,433 > 0,2; то р(л/р4)>р(р/р4).
Итак, все результаты сравнений fUj pY и F^P/P^ показывают, что только по основанию P2 =3 относительное значение проекций числа A меньше, чем относительное значение константы P. Следовательно, ошибка произошла в канале по основанию P^ 1 коррекцию ее проведем на основе КТО с дробными числами. В этом случае kx =0,5; k3 =0,8; k4 =0,714. Найдем их двоичные эквиваленты разрядностью F = ll двоичных разрядов как в примере выше, тогда kx = 0,10000000000 ; k3 = 0,11001100110 ;
k4 =0,10110110110, откуда fYaJpA-h =0,042,n =0,0000101010 1;
P2 = 7010 = 1000110, тогда
A = F(A2/P2\-n P2 =0,00001010101 x
X1000110 = 0000010,11100111110.
Отбрасывая дробную часть с округлением вверх, получим zl = ll2=3l0. Отсюда a2 = 3mod3 = 0 и восстановленный правильный результат в СОК будет равен Л = (1,0,3,3).
Аппаратная реализация блока коррекции ошибок модулярного процессора
На рисунке 1 приведена архитектура блока коррекции ошибок модулярного процессора. На вход блока поступает исходное число A (tZpCt2, ... o?n+r), на выходе формируется откорректированное число A =(«!,6z2, ... a,]+rY Входные регистры KGPi, где i = 1,2, ... 77 + 1, ... 77 + 7' объемом (« + '')riogP/l бит служат для временного хранения разрядов а, и mf в СОК, поступающих по входным шинам размером ^/ ^FlogP/l- Схема формирования проекций (СФП- А ) для избыточного диапазона ^изб и схема формирования проекций (СФП- М ) для рабочего диапазона P = M путем реконфигурации формируют кортежи i -ых проекций и единичные сигналы, используемые для локализации ошибочного разряда.
Выходы схем формирования проекций СФП- А и СФП- М поступают на вход LUT/?; – таблицы суммарным объемом о(/?26 log 77) бит. Для сравнения, процедура преобразования в ОПСС требует o(/7226) бит при нежестком допущении когда ь,=ь, где bj – количество двоичных разрядов модулей Pi .
Для повышения эффективности алгоритма и удобства анализа его сложности, предпола- гается, что величины модулей имеют одинаковую битовую длину. В LUT-таблицы записываются некоторые округленные дробные числа k«/]2-v и k^/L-v , каждое из которых содержит
N = [log. Pi +1] бит, которые затем суммируются деревом сумматоров
и
/7 + 2
Hkimi j = n + ]
по модулю 1. Точные значения чисел определяются неравенством Ы2"' <Л-<М2-л +2-у+1 .
Результаты суммирования в виде значений
F^/p\ F^MIP^ или F(Ai/P^ и F(.M/Pi)
поступают на схему сравнения (СС), подробное описание которой приведено в [5]. СС формирует сигналы: «ошибка или переполнение диапазона» или «ошибка не установлена».
При определении ошибки выходной сигнал СС поступает на вход «s» триггера ТТ и переводит его в единичное состояние, которое запускает счетчик проекций (СТ). Счетчик проекций управляет реконфигурацией СПФ-А и СПФ-М, которые формируют кортежи i -ых проекций. Кроме того, выходной сигнал СС является стробирующим для схем « И;», определяющих отказавший модуль СОК.
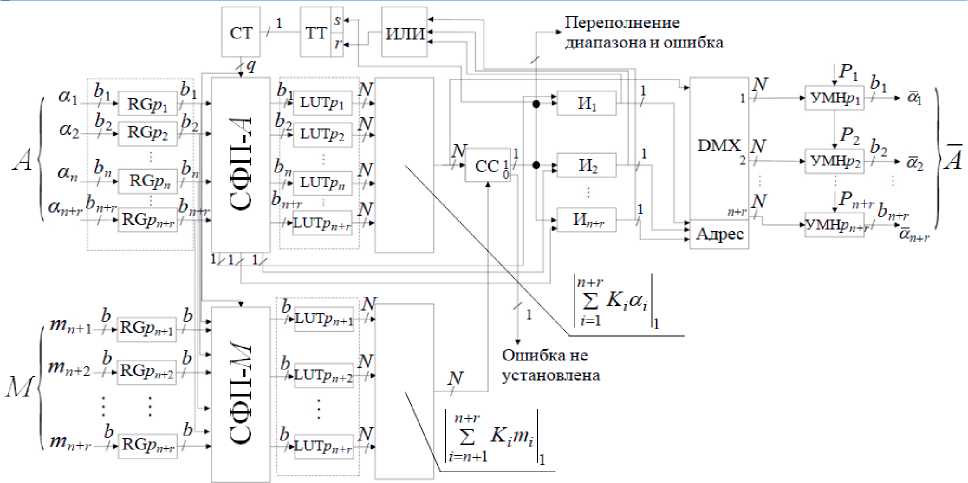
Рисунок 1. Аппаратная реализация блока контроля ошибок модулярного процессора
На вторые входы схем « И;» поступают сигналы с выхода СПФ- А . Выходные значения схем «И, » используются в качестве адресного кода демультиплексора DMX типа 1: п, где n количество модулей СОК. Информационный вход DMX коммутирует на входы умножителей УМН pi только проекции 4- так как при анализе числа А адресный код равен(0;0;...0),нулевой выход которого не используется. В исходном состоянии триггер ТТ и счетчик проекций СТ находятся в нулевом состоянии.
Рассмотрим работу блока в режиме определения, локализации и коррекции одиночной ошибки. Контролируемое число Л =(«,,«,, ...а„^ и константа мЦ«н+п«„^- «„+,-) поступают на выходные регистры и далее, соответственно, на входы СПФ-А и СПФ-М. Выходные сигналы схемы формирования проекций числа А (СФП-А) по основаниям р, z = 1,2,... п + г и схемы формирования проекции константы М по избыточным модулям Рп*\’"- Рп+г поступают на адресные входы LUT-таблиц по соответствующим модулям Ps,Pl,- Р„+г и Рп+\’"“ Рп+г LUT-таблиц. В LUT-таблицах записываются округленные дробные числа [^',а,]2-л и [А' /и,]2-л , соответственно, LUTp,, LUTp2, ... LUTp„ и ШТЛ+1, ... ШТЛ,+,.. LUT-таблицы введены для замены операции умножения выборкой ре- зультата умножения.
Выходные значения LUT-таблиц в виде про изведений k«/]2-v и Vkimi ],-л поступают на входы сумматоров
укт
L/ = n + l J2--v J соответственно, где происходит суммирование дробных чисел по modi и формирование значений функций F^AIP^ и F^MIPY Полученные в виде дробных значений результаты суммирования f^a/p) и f(m/p) поступают на входы схем сравнения.
Если
нулевом выходе СС ф
l=n+l
то на rN 1 ормируется «1», которая сигнализирует об отсутствии ошибки и процесс контроля заканчивается, в противном случае, если
то на пер-
вом выходе СС появляется «1», которая формиру- ет сигнал «переполнение диапазона и ошибка», и поступает на вход «s» триггера ТТ и переводит его в единичное состояние; выходной сигнал триггера запускает счетчик проекций (СТ). Вы- ходные сигналы счетчика поступают на входы схем формирования проекций СФП-А и СФП-М, где формируются кортежи первых проекций чи- сел 4 и М, которые являются адресными входами LUT-таблиц, в элементах которых содержатся произведения \kjttiL и kwJ, , где к. уже новые константы, соответствующие набору модулей
СОК первой проекции.
Выходные значения мируются в сумматорах
LUT-таблиц сум-
и
результаты которых поступают на вход СС. Если

то на первом выходе СС формируется сигнал рав- ный «1», который поступает на все первые входы элементов « И,», где i = 1,2,... n + /•, а на вторые входы элементов « И, » поступает сигнал с выхода блока СФП-А, который соответствует первой проекции, сформированный код на адрес- ном входе DMX коммутирует значение первой проекции на вход схемы умножения УМН p1. Выходной сигнал того элемента « И, », у которого оба входа активные, является индикатором отказавшего модуля и через элемент ИЛИ устанавливает триггер ТТ в нулевое состоя- ние, на этом процесс коррекции заканчивается. Кроме того, выходы элементов « И, » являются адресными входами демультиплексора DMX, который коммутирует i-ую проекцию на вход умножителя по модулю pi (УМН pi), на выходе которого формируется правильное значение ai отказавшего модуля. Так как по условию исправляется только один отказ, то после первого поступившего сигнала на вход «r» триггера ТТ означает окончание контроля и блок контроля переходит в исходное состояние. После анализа первой проекции счетчик проекций CТ формирует следующую проекцию и процесс контроля осуществляется аналогично до определения первого отказа. В худшем случае отказавший канал может быть PnFr .
Моделирование блока контроля
Общая структура алгоритма и блока контроля похожи на известные алгоритмы и схемы, где для формирования проекций используется ОПСС. Предполагается, что СОК содержит n модулей, модулярных процессоров и b бит для каждого из модулей. Предложенный блок контроля использует LUT-таблицы суммарным объемом O^n2b log z?) бит. Процедура преобразования в ОПСС требует таблицы размером («226) бит. По сравнению с наиболее эффективными практическими реализациями СОК [20], которые базируются на ОПСС, вычислительная сложность предложенной архитектуры сокращает аппаратурные затраты в n I log n раз на выполнение основной части блока контроля. Элементы оставшейся части блока контроля однотипные, которые используются в известной и предложенной схемах. Сравнение вычислительной сложно сти предлагаемого блока проведем с известным, который реализован на улучшенной архитектуре ОПСС.
Моделирование проводилось с использованием средств среды ISE Design Suite 14.7 на плате Kintex-7 KC705 XC7K70T-2FBG676 без блоков DSP48E1. Данная плата содержит 10250 блоков Slice и 300 блоков ввода/выво-да. Модель выбрана при фиксированном количестве оснований с изменением разрядности модулей. В каждом случае подбирались простые основания системы заданной разрядности, общие для каждого из методов. Было использовано 4 основания с количеством бит модулей 5, 9, 13, 17, 21 и 25. Динамический диапазон системы приближенно равен произведению количества оснований на разрядность каждого из них. На рисунке 2а представлен график, отражающий использование ресурсов платы при использовании модулей различной разрядности для каждого из анализируемых методов.
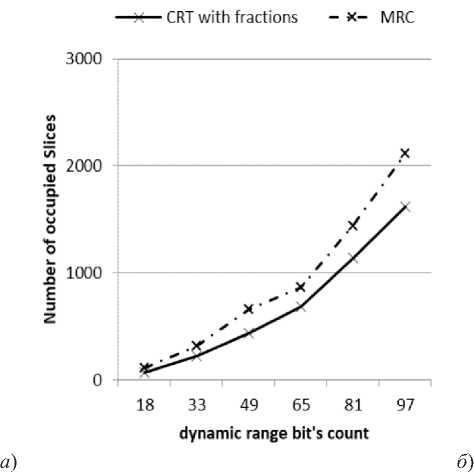
Рисунок 2. Зависимость от разрядности используемых модулей системы:
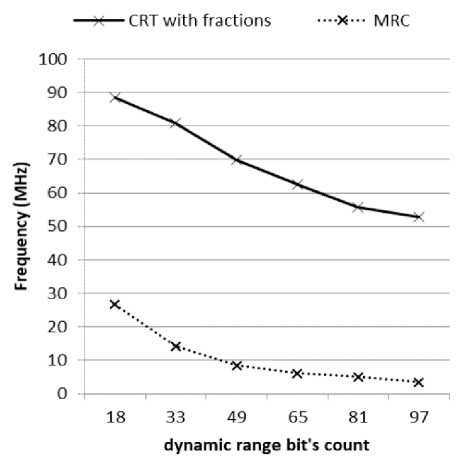
а) от числа использованных блоков Slice платы FPGA Kintex-7 КС705; б) от частоты разработанных схем
Под задержкой схемы будем понимать максимальное время, затрачиваемое на преобразование данных от некоторого входа до некоторого выхода. Оценка задержки позволяет получить представление о быстродействии реализованного алгоритма, в том числе оценить частоту работы схемы. На рисунке 2б представлен график зависимости частоты от разрядностей оснований при моделировании определения, локализации и исправления ошибки с использованием ОПСС и КТО с дробными величинами. В качестве примера рассмотрим разрядность диапазона 64 бит как одну из наиболее распространенных в компьютерных системах. Для того, чтобы можно было представлять числа в данной системе, достаточно представить каждый из четырех модулей 16-или 17-битным числом. Пусть в данном случае система модулей имеет вид {65537, 65539, 65543, 65551}, диапазон данной системы представляет собой 65-битное число, что покрывает диапазон 64 бита. Для данной разрядности приближенный метод на основе КТО с дробными величинами требует всего 689 блоков Slice, в то время как схема ОПСС – 865 блоков. С другой стороны, частота приближенного метода составляет 62,5 МГц, что в 10,1 раз больше, чем улучшенный ОПСС.
Заключение
В этой статье предложены высокоэффективные подходы, которые способны оптимизировать вычислительную сложность предложенного метода проекций модулярного числа при локализации ошибочного разряда с помощью КТО с дробными числами. Благодаря применению КТО с дробными числами в популярном методе проекций нам удалось заменить сложные операторы преобразования чисел из СОК в ОПСС недорогими операциями сложения, что и привело к значительному снижению ресурсов, а также к повышению производительности. На базе платформы FPGA разработаны структуры определения, локализации и исправления ошибок для различных наборов модулей СОК.
Работа выполнена при финансовой поддержке РФФИ в рамках научного проекта № 18-07-00109 и при поддержке Гранта Президента Российской Федерации МК-6294.2018.9. Авторы выражают благодарность анонимным рецензентам за ценные замечания к рукописи статьи.
Список литературы Оптимизация процесса коррекции ошибок в системе остаточных классов за счет применения китайской теоремы об остатках с дробными числами
- Omondi A., Premkumar B. Residue Number Systems: Theory and Implementation. London: Imperial College Press, 2007. - 296 p.
- Molahosseini A.S., Sorouri S., Zarandi A.A.E. Research challenges in next-generation residue number system architectures. Computer Science & Education (ICCSE), 7th International Conference, 2008. - Р. 1658-1661. DOI: 10.1109/ICCSE.2012.6295382
- Червяков Н.И., Сахнюк П.А., Шапошников А.В., Макоха А.Н. Нейрокомпьютеры в остаточных классах. М.: Радиотехника, 2003. - 272 с.
- Червяков Н.И., Сахнюк П.А., Шапошников А.В., Ряднов С.А. Модулярные параллельные вычислительные структуры нейропроцессорных систем. М.: ФИЗМАТЛИТ, 2003. - 288 с.
- Chervyakov N.I., Lyakhov P.A., Babenko M.G. Digital filtering of images in a residue number system using finite-field wavelets // Automatic Control and Computer Sciences. 2014, Vol. 48, No. 3, 2014. - P. 180-189. DOI: 10.3103/S0146411614030031
