Оптимизация работы адаптивных светофоров на основе использования машинного зрения

Автор: Шепелев Владимир Дмитриевич, Альметова Злата Викторовна, Моор Александр Дмитриевич, Берстенева Валерия Игоревна
Рубрика: Логистика и управление транспортными системами
Статья в выпуске: 1 т.14, 2020 года.
Бесплатный доступ
В работе проведен анализ дорожного и пешеходного трафиков на регулируемом перекрестке с применением нейронных сетей в задачах интерпретации видеопотока, поступающего с камер уличного наблюдения. Предложен новый подход по оптимизации пропускной способности узлов на основе интеллектуальной технологии по взаимодействию дорожной инфраструктуры с транспортным и дорожным трафиком I2P. Установлены факторы, влияющие на снижение эффективности использования дорожной инфраструктуры. На основе динамического мониторинга дорожного и пешеходного трафиков разработаны алгоритмы работы светофорных объектов с учетом параметров пешеходного трафика. Решение основано на сборе и обработки динамических данных дорожного и пешеходного трафиков в режиме реального времени для системы обучения адаптивных светофоров. В основу «умного светофора» заложен принцип создания минимальных воздействий на пешеходный трафик и обеспечения максимальной пропускной способности транспорта при повороте направо. Исследования предлагаемого подхода проводились на одном из самых загруженных перекрестков г. Челябинска и могут быть использованы на других узлах улично-дорожной сети (УДС) городов.
Мониторинг, машинное зрение, пропускная способность перекрестка, умный светофор
Короткий адрес: https://sciup.org/147233828
IDR: 147233828 | УДК: 656.02 | DOI: 10.14529/em200119
Performance optimization of adaptive traffic lights using machine vision
The paper analyzes road and pedestrian traffic at a controlled intersection using neural networks in the tasks of interpreting video stream coming from street surveillance cameras. A new approach for optimizing node throughput is given based on intelligent technology for interacting the infrastructure with I2P transport and road traffic. The factors that affect the reduction of the efficiency in the use of road infrastructure have been identified. On the basis of dynamic monitoring of road and pedestrian traffic, algorithms for the operation of traffic lights have been developed, taking into account the parameters of pedestrian traffic. The solution is based on the collection and processing of dynamic data of road and pedestrian traffic in real time for the adaptive traffic light training system. The “smart traffic light” is based on the principle of creating minimal impacts on pedestrian traffic and ensuring maximum traffic capacity when turning to the right. The study of the given approach is conducted at one of the busiest intersections in Chelyabinsk and can be used at other nodes of the city's road network (RN).
Текст научной статьи Оптимизация работы адаптивных светофоров на основе использования машинного зрения
Рост уровня автомобилизации, развития сети городов требует решения проблем повышения пропускной способности узлов улично-дорожной сети (УДС), снижения уровня аварийности на дорогах. В настоящее время развивается концепция «умный город», которая подразумевает использование информационных и коммуникационных технологий (ИКТ) для разработки инструментов, позволяющих решать социальные и экономические проблемы населения.
Актуальность разработки предложений и рекомендаций по совершенствованию и развитию существующих интеллектуальных цифровых решений не вызывают сомнений, поскольку имеющиеся программные продукты используют упрощенные модели оптимизации и не учитывают существующие ограничения, что приводит к тому, что УДС не справляется с оказываемой на неё нагрузкой.
По состоянию на сегодня отсутствует технология, позволяющая увеличить пропускную способность регулируемых пересечений путем компьютерного интеллекта и машинного зрения с минимальным воздействием на пешеходов.
Это исследование представляет собой новый подход по повышению пропускной способности на регулируемых перекрестках на основе применения искусственного интеллекта (I2P).
Исследованию вопросов повышения пропускной способности путем использования информационных и коммуникационных технологий посвящен ряд работ [1–8].
Так, в работе авторов Ameddah M.A., Das B. и Almhana J. был предложен алгоритм, базирующийся на автомобильных сетях (VANET) и позволяющий транспортным средствам с более высоким приоритетом проезжать перекресток до транспортных средств с более низким приоритетом [1].
Авторы Adebiyi R.F., Abubilal K.A., Mu'azu M.B. и Adebiyi B.H. разработали адаптивную систему управления трафиком, которая динамически управляет фазами на перекрестке. Разработанная модель оптимально планирует время зеленого света в соответствии с условиями движения на каждой полосе, чтобы минимизировать среднее время ожидания на перекрестке [2].
В работе авторов Younis O. и Moayeri N предлагается новая технология динамического управления светофорами. Авторы использовали сенсорную сеть для сбора данных о трафике, которая в зависимости от загрузки перекрестка изменяет протокол работы светофоров в режиме реального времени [3].
Исследователи Manandhar B. и Joshi B. разработали гибридную систему управления светофорами, основанную на статическом мультиплексировании и оптимизации роя частиц [4].
В своей работе авторы Климович А.Н. и Шуть В.Н. предложили метод, основанный на технологии взаимодействия между автомобилями и дорожной инфраструктурой (V2I). Повышение пропускной способности достигается за счет динамического формирования тактов перекрестка на основе более полной информации о транспортном потоке [6].
Зиновьев И.В. в своей работе [7] разработал алгоритм адаптивного управления светофорами на основе роя частиц и моделирования в программе микроскопического моделирования SUMO, позволяющий повысить пропускную способность приблизительно на 19 %.
Авторы Ping Guo, Daiwen Lei и Lian Ye предложили метод интеллектуального управления транспортом, включающий в себя оптимизацию разрешающего сигнала светофора и комбинирования полос для движения [8].
Ряд работ посвящен применению компьютерного зрения в целях повышения пропускной способности перекрестков [9–12].
В работе авторы Mishra S., Birchha V. представили систему, использующую искусственный интеллект и компьютерное зрение для сбора и анализа данных о дорожном трафике [9].
В исследовании авторов Narnolia V., Jana U., Chattopadhyay S. и Roy S. представлен алгоритм интеллектуального регулирования трафика, который будет учитывать плотность дорожного трафика в реальном времени с использованием обработки изображений по каждой полосе движения, чтобы сократить время ожидания и улучшить общую пропускную способность [10].
Группой исследователей Chowdhury M.F., Ryad Ahmed Biplob M. и Uddin J. разработана динамическая система управления трафиком, использующая компьютерное зрение, с помощью которого собираются данные о дорожном трафике между двумя перекрестками [11].
Отличительной особенностью работы авторов Das A., Pai S., Shenoy V.S., Vinay T. и Shylaja S.S. является повышение точности распознавания транспортных средств компьютерным зрением в неблагоприятных погодных условиях с помощью алгоритма, основанного на R-CNN и быстрой двусторонней фильтрации [12].
Методология исследования
При проведении исследования были использованы методы анализа и синтеза, формализации и аналогии. Основой исследования явились системный подход и системный анализ, теории математической статистики и математического моделирования. Теоретической и методологической основой исследования послужили научные труды отечественных и зарубежных ученых в области информационно-коммуникационных технологий, моделирования транспортных систем.
Основная часть
Основываясь на анализе заторных ситуаций в крупных городах, для решения проблем пропускной способности был выбран один из перекрёстков г. Челябинска (ул. Молодогвардейцев – пр. Победы). На данном транспортном узле выявлена большая нагрузка, выраженная длительными заторами (с 7:30 ч до 19:30 ч). При исследовании учитывались следующие параметры: глубина и время существования затора, периодичность его возникновения.
Пропускная способность регулируемых узлов определяется пропускной способностью магистрали в сечении стоп-линии и пропускной способностью одной полосы, количеством полос движения, организацией движения в узле, режимом регулирования [13].
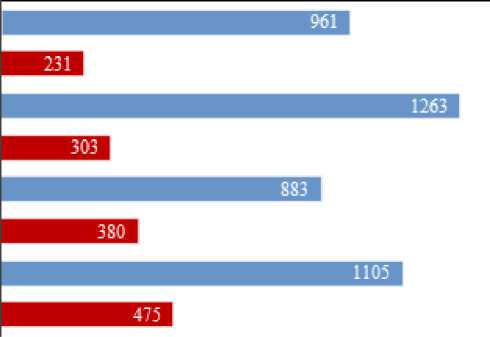
Анализ пропускной способности перекрестка показал, что наибольшей пропускной способностью обладает полоса (2S_N), по которой разрешается движение только в прямом направлении. Обуславливается это тем, что на транспортные средства, движущиеся по этой полосе, не влияют никакие снижающие или ограничивающие движение факторы, такие как: конфликт с пешеходным потоком или встречным направлением транспортных средств, необходимость снижать скорость при повороте. Наименьшей пропускной способностью обладает полоса, разрешающая движение прямо и направо (1RS_N). На снижение пропускной способности оказывает большая доля пассажирского общественного транспорта, который имеет меньшие динамические показатели по сравнению с легковыми автомобилями. Также ограничивающим движение фактором является то, что при повороте направо необходимо уступать дорогу пешеходам.
Сравнение показателей полос различных направлений представлены в табл. 1 и на рис. 1.
Полученное значение величины потока насыщения практически в два раза ниже теоретического, что свидетельствует о наличии факторов, негативно влияющих на формирующийся поток насыщения и, соответственно, на пропускную способность в целом [14, 15].
Для сравнения теоретических данных, полученных путем вычислений с фактическими данными, полученными с помощью камер «Интерсвязь», использованы модели определения коэффициентов приведения к легковому автомобилю для регулируемых пересечений [16]:
v = KrN+ Na, где ν – пропускная способность по полосам, прив. ед./ч.; K i – коэффициент приведения транспортного средства i -го типа к легковому автомобилю; N i – количество автомобилей i -го типа в очереди; N a – количество легковых автомобилей.
Таблица 1
Сравнение показателей полос различных направлений
|
Показатели |
1RS_N |
1RS_S |
1RS_W |
1RS_E |
|
Влияние общественного (для W и E грузового) транспорта, f bb |
0,85 |
0,89 |
0,98 |
0,99 |
|
Влияние ширины полосы, fw |
1,1 |
1,04 |
1,06 |
1,06 |
|
Влияние продольного уклона, fg |
0,95 |
1,02 |
1 |
1 |
|
Тип территории, fa |
0,9 |
0,9 |
0,9 |
0,9 |
|
Коэффициент приведения, учитывающий правоповоротное движение без конфликта, f’Rpb |
0,94 |
0,95 |
0,78 |
0,86 |
|
Коэффициент приведения, учитывающий правоповоротное движение с конфликтом, fRpb |
0,63 |
0,82 |
0,5 |
0,62 |
|
Поток насыщения, прив.ед./ч |
961 |
1263 |
883 |
1105 |
|
Пропускная способность полосы, прив.ед./ч |
231 |
303 |
380 |
475 |
|
Параметр Nped , пеш. |
19,7 |
19,2 |
8,3 |
21,6 |
|
Минимальная длительность зеленого сигнала светофора, необходимая для пересечения пешеходами проезжей части, с |
38 |
37 |
24 |
31 |
Поток насыщения и пропускная способность. прив.ед.. ч
О 200 400 600 800 1000 1200

-
■ Поток насыщения
-
■ Пропускная способность
Рис. 1. Сравнение пропускной способности и потока насыщения полос различных направлений (прив. ед./ч)
Таблица 2
Значения пропускной способности по полосам
|
Наименование полосы |
1RS — N |
1RS — S |
1RS W _ |
1RS _E |
|
Прив.ед./ч |
317 |
283 |
499 |
479 |
Результаты теоретического и фактического исследования показывают, что реальная и фактическая пропускная способность на полосах 1RS_S и 1RS_E практически совпали, а у полос 1RS_N и 1RS_W наблюдается погрешность 27 и 24 % соответственно. В силу того, что транспортный поток нестабилен в течение всего времени, данная погрешность вполне допустима.
Проектное решение
Для решения пропускной способности полосы при повороте направо, предлагается в настройки светофорного объекта «Умный светофор» заложить адаптивный алгоритм настройки разрешающих тактов для пешеходов. С учетом дорожнотранспортной обстановки интеллектуальная система устанавливает минимальное время такта для пешеходов, необходимого для пересечения проезжей части. Новизной данного подхода является решение, построенное на применении нейронных сетей, что позволяет ограничивать время для пешеходов только в случаях, когда есть потребность в проезде транспорта.
Интерпретация данных, поступающих с камер, позволяет определить количество автомобилей и пешеходов для каждой полосы, разрешающей поворот направо в режиме реального времени (рис. 2).
Камера работает на основе нейронных сетей, преимуществом которой является возможность обучаться и исправлять ошибки [17]. Также камера обучена подсчитывать транспортные средства, подразделяя их на 6 категорий. На основе анализа видеоаналитики определено минимальное время, необходимое пешеходам для пересечения проезжей части.
Для пешеходов, имеющих конфликт с транспортными средствами, движущимися по полосам 1RS_N и 1RS_S, при действующей длительности основного такта 24 с, возможно его сокращение на 4 и 5 с, соответственно. Но это не является пределом, так как на проезжей части расположен островок безопасности, до достижения которого требуется около 8 с, следовательно, в исключительных случаях, например, при заторе, возможно сокращение такта на 16 с.
Для пешеходов, имеющих конфликт с транспортными средствами, движущимися по полосам 1RS_W и 1RS_E, при действующей длительности основного такта 43 с, возможно его сокращение на 28 и 27 с соответственно.
Установлена зависимость пропускной способности от увеличения времени, в течение которого транспортные средства могут проезжать без конфликта с пешеходами.
Результаты исследования показали, что каждые 2 секунды, уменьшающие основной такт для пешеходов, позволяют повысить пропускную способность на 28–30 прив. ед./ч. При длительности цикла 100 с (36 циклов в час) за каждый цикл проезжает на 1 транспортное средство больше, чем при существующем варианте.
Таким образом, при минимальном использовании предлагаемого подхода, пропускная способность полосы с разрешенным движением прямо и направо повышается на 8–10 %.
Предлагаемое решение было смоделировано с помощью программы «PTV Vissim» (рис. 3).
На рис. 3а представлен существующий вариант перекрестка, на рис. 3б – имитационный (сокращение времени разрешающего такта для пешеходов). На примере полосы 1RS_N было произведено сравнение данных, полученных с помощью теоретического расчета и данных при имитационном моделировании (рис. 4).

Рис. 2. Анализ дорожно-транспортной обстановки с помощью камеры
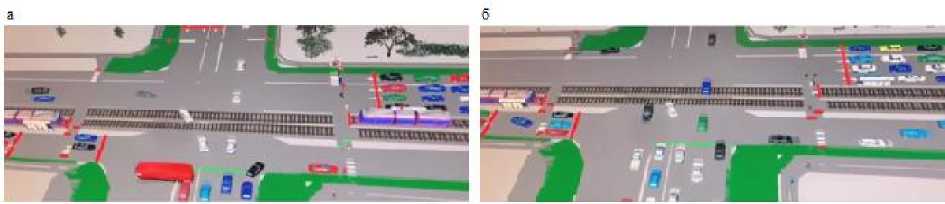
Рис. 3. Имитационное моделирование в программе «PTV Vissim»
В результате проведенного сравнения пропу-
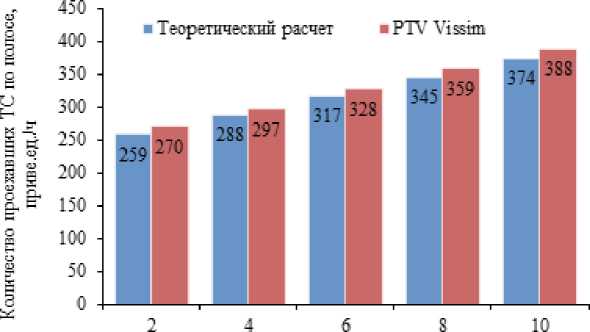
Время, на которое будет сокращен основной такт для пешеходов, сек
Рис. 4. Сравнение результатов теоретического расчета и имитационного моделирования на примере полосы 1RS_N
скная способность, полученная с помощью программы «PTV Vissim», оказалась на 4 % выше, чем полученная теоретическим расчетом.
Для повышения пропускной способности дорог, как правило, производят расширение проезжей части (устройство дополнительной полосы) [18–20], но зачастую это не представляется возможным.
Предварительные результаты и обсуждение
Исследованы основные динамические параметры автомобильного и пешеходного трафиков на регулируемом перекрестке в режиме реального времени. Получены зависимости и закономерности влияния пешеходного трафика на пропускную способность полос с учетом структуры транспортного потока, геометрии перекрестка и его особенностей. Предлагается использовать сбор, обработку больших данных с видеопотока в режиме реального времени для настройки алгоритмов работы адаптивных светофорных объектов. Предлагается сокращать время работы разрешающего такта для пешеходов только в условиях высокой интенсивности дорожного трафика. Данный подход позволяет обеспечить более комфортные условия для пешеходов, по сравнению с жестким сценарием, когда выставляется минимальное время для пересечения проезжей части. Использование адаптивных светофоров позволяет увеличить пропускную способность полосы с разрешенным поворотом прямо и направо до 50 %.
Список литературы Оптимизация работы адаптивных светофоров на основе использования машинного зрения
- Ameddah M.A., Das B., Almhana J. Priority based algorithm for traffic intersections streaming using VANET // 14th International Wireless Communications and Mobile Computing Conference. - Li-massol, Cyprus, 2018.
- Adebiyi R.F., Abubilal K.A., Mu'azu M.B., Adebiyi B.H. Development and simulation of adaptive traffic light controller using artificial bee colony algorithm // International Journal of Intelligent Systems and Applications. - 2018. -V.10 (8). - P. 68-74.
- Younis O., Moayeri N. Employing cyber-physical systems: dynamic traffic light control at road intersections // IEEE Internet of Things Journal. - 2017. - V. 4 (6). - P. 2286-2296.
- Manandhar B., Joshi B. Adaptive traffic light control with statistical multiplexing technique and particle swarm optimization in smart cities // 3rd IEEE International Conference on Computing, Communication and Security. - Kathmandu, Nepal, 2018.
- Shinde S.M. Adaptive traffic light control system // 1st International Conference on Intelligent Systems and Information Management. - Maharashtra, India, 2017.
- Климович, А.Н. Алгоритм управления перекрестком на основе V2I взаимодействия / А.Н. Климович, В.Н. Шуть // Системный анализ и прикладная информатика. - 2018. - № 4. - С. 21-27.
- Зиновьев, И.В. Алгоритм адаптивного управления светофорами на основе алгоритма роя частиц / И.В. Зиновьев // Научный журнал. - 2016. - № 4(5). - С. 26-30.
- Guo P., Lei D., Ye L. An indefinite cycle traffic light timing strategy // International Journal of Advanced Computer Science and Applications. - 2018. -V. 9, No. 5.
- Mishra S., Birchha V. An improved smart traffic signal using computer vision and artificial intelligence // International Journal of Recent Technology and Engineering. - 2019. - V. 8 (4). - P. 4124-4131.
- Narnolia V., Jana U., Chattopadhyay S., Roy S. Generalized smart traffic regulation framework with dynamic adaptation and prediction logic using computer vision // Advances in Intelligent Systems and Computing. - 2020. - V. 937. - P. 249-263.
- Chowdhury M.F., Ryad Ahmed Biplob M., Uddin J. Real time traffic density measurement using computer vision and dynamic traffic control // Joint 7th International Conference on Informatics, Electronics and Vision and 2nd International Conference on Imaging, Vision and Pattern Recognition. - Kita-kyushu. Japan, 2018.
- Das A., Pai S., Shenoy V.S., Vinay T., Shylaja S.S. D2: Real-time dehazing in traffic video analytics by fast dynamic bilateral filtering //Advances in Intelligent Systems and Computing. - 2020. - V. 1024. -P. 127-137.
- Булавина, Л.В. Расчет пропускной способности магистралей и узлов /Л.В. Булавина. - Екатеринбург: УГТУ-УПИ, 2009. - 50 с.
- Боровской, А.Е. Реальный поток насыщения в зависимости от класса легкового автомобиля/ А.Е. Боровской, А.Г. Шевцова // Проблемы качества и эксплуатации автотранспортных средств: Сб. матер. VII международной науч.-техн. конф. - 2012. - Пенза: ПГУАС. - С. 244-250.
- Идеальный поток насыщения на регулируемом пересечении. - 2019. -https://www.science-direct.com/science/article/pii/S2352146517305173 (дата обращения 20.12.2019 г.).
- Kockelman K.M., Raheel A.S. Effect of vehicle type on the capacity of signalized intersections: the case of light-duty trucks // Journal of Transportation Engineering. - 2000. - V. 126 (6). - P. 506-512.
- Нейронные сети. - 2019. - https://journals. plos.org/plosone/article?id=10.1371/journal.pone. 021 5136 (дата обращения 15.12.2019 г.).
- Рекомендации по проектированию улиц и дорог городов и сельских поселений. - 2019. -https://files.stroyinf.ru/Data1/45/45490/ (дата обращения 23.12.2019 г.).
- Стоимость 1 км дороги в Челябинской обл., нанесения дорожной разметки, установки искусственной дорожной неровности, дорожных знаков, барьерных ограждений, реконструкции светофорного объекта - 2019. - https://dos-tup1.ru/economics/Mindortrans-poschital-skolko-stoit-1-kilometr-dorogi-v-Chelyabinskoy-oblasti_89819.html (дата обращения 12.11.2019 г.).
- Стоимость камер видеонаблюдения. -2019. - https://securityrussia.com/cctv/kamery/geo-vision-gv-bl3400 (дата обращения 22.11.2019 г.).
