Оптимизация режима работы гидропривода нового грузоподъёмного механизма манипулятора автолесовоза

Автор: Четверикова И.В., Зимарин С.В., Дручинин Д.Ю., Богданов Д.С., Хрипченко М.С.
Журнал: Resources and Technology @rt-petrsu
Статья в выпуске: 3 т.22, 2025 года.
Бесплатный доступ
На лесотранспортных машинах манипуляторного типа имеется известная проблема регулирования скорости подъёма стрелы в зависимости от силы тяжести груза и проблема снижения динамической нагруженности стреловой группы. Существующие механические демпфирующие устройства имеют возможность срабатывания только в определённых положениях поршней подшипников или гидроцилиндров. Поэтому необходима разработка конструкции грузоподъёмного механизма манипулятора с возможностью обеспечить ускоренный режим подъёма лёгких грузов и холостых перемещений манипулятора и снижение динамических нагрузок при штатных режимах погрузочно-разгрузочных работ. Для обоснования параметров и режимов работы гидропривода нового грузоподъёмного механизма манипулятора автолесовоза требуется проведение теоретических и экспериментальных исследований. Данная статья посвящена экспериментальному исследованию работы гидропривода нового грузоподъёмного механизма манипулятора и определению его оптимальных параметров, обеспечивающих снижение динамической нагруженности и повышение производительности лесного манипулятора. Получены регрессионные модели влияния технологического параметра нового демпфера (степени открытия дросселя) гидропривода лесного манипулятора на показатели его работы (время подъёма и опускания стрелы манипулятора, давление в гидравлической системе при подъёме и опускании стрелы манипулятора, количество колебаний давления в гидравлической системе при подъёме и опускании стрелы манипулятора). Установлено, что с увеличением степени открытия дросселя демпфера гидропривода лесного манипулятора время подъёма стрелы сначала снижается до величины открытия дросселя 0,74, а затем увеличивается; время опускания стрелы снижается; давление в гидравлической системе при подъёме и опускании стрелы повышается; количество колебаний давления в гидравлической системе при подъёме снижается до величины открытия дросселя 0,82, а затем растёт; количество колебаний давления в гидравлической системе при опускании снижается. Определено оптимальное значение степени открытия дросселя демпфера 0,78 (78 %), при котором обеспечивается максимальная производительность гидропривода лесного манипулятора с минимальной динамической нагруженностью гидросистемы, что даёт возможность достичь поставленной цели исследования.
Лесной комплекс, лесозаготовки, автолесовоз, гидропривод, манипулятор, демпфер
Короткий адрес: https://sciup.org/147251909
IDR: 147251909 | УДК: 630.65.011.54 | DOI: 10.15393/j2.art.2025.8503
Optimization of the hydraulic drive mode of the new lifting mechanism of the truck loader manipulator
On timber handling machines of the manipulator type, there is a well-known problem of regulating the boom lifting speed depending on the gravity of the load and the problem of reducing the dynamic load of the boom group. Existing mechanical damping devices have the ability to operate only in certain positions of bearing pistons or hydraulic cylinders. Therefore, it is necessary to develop the design of the lifting mechanism of the manipulator to provide an accelerated lifting mode for light loads and idle movements of the manipulator and to reduce dynamic loads during normal loading and unloading operations. Theoretical and experimental studies are required to substantiate the parameters and operating modes of the hydraulic drive of the new lifting mechanism of the manipulator truck. This article presents an experimental study of the hydraulic drive operation of a new lifting mechanism of a manipulator aimed at determining its optimal parameters to ensure a reduction in dynamic load and an increase in productivity of a forest manipulator. Regression models of the technological parameter effect of the new damper (degree of throttle opening) of the hydraulic drive of the forest manipulator on its performance (time of lifting and lowering the boom of the manipulator, pressure in the hydraulic system when lifting and lowering the boom of the manipulator, the number of pressure fluctuations in the hydraulic system when lifting and lowering the boom of the manipulator) have been obtained. It was found that with an increase in the degree of opening of the throttle of the hydraulic drive of the forest manipulator, the boom lifting time first decreased to the throttle opening value of 0.74, and then increased; the boom lowering time decreased; the pressure in the hydraulic system increased when lifting and lowering the boom; the number of pressure fluctuations in the hydraulic system decreased to the throttle opening value of 0.82, and then it increased; the number of pressure fluctuations in the hydraulic system decreased during lowering. The optimal value of the degree of the damper throttle opening is 0.78 (78%), which ensures maximum performance of the hydraulic drive of the forest manipulator with minimal dynamic loading of the hydraulic system, which makes it possible to achieve the research goal.
Текст научной статьи Оптимизация режима работы гидропривода нового грузоподъёмного механизма манипулятора автолесовоза
В настоящее время одним из острых вопросов в сфере российского лесного хозяйства является импортозамещение и разработка высокоэффективной техники.
Основным недостатком современных лесных манипуляторов является наличие значительных динамических нагрузок в переходных режимах работы и раскачивание захватов с брёвнами. Это существенно затрудняет создание новой конкурентоспособной манипуляторной техники.
Одним из перспективных направлений минимизации динамических нагрузок и энергопотребления лесотранспортных машин является внедрение энергосберегающих гидроприводов и устройств, способных аккумулировать и возвращать энергию, теряемую в процессе работы (рекуперация энергии). Кроме того, такие гидроприводы способствуют снижению динамических нагрузок на металлоконструкции машин.
Вопросы энергоэффективности технологических процессов активно исследуются как в России, так и за рубежом. Так, С. А. Голякевич провёл имитационное моделирование технологического процесса работы оборудования форвардера как мехатронной системы, разработал математическую модель динамики манипуляторов многооперационных лесозаготовительных машин [1], [2]. А. А. Тарбеев в своей работе приводит возможное обеспечение надёжности гидроприводов лесных машин за счёт совершенствования методов и средств их диагностирования [3]. Е. В. Авдеева и В. Ф. Полетайкин занимались исследованием нагрузок на гидроцилиндры манипулятора [4]. А. В. Лагерев и И. А. Лагерев исследовали современную теорию манипуляционных систем мобильных многоцелевых транспортно-технологических машин и комплексов, занимались моделированием рабочих процессов в гидроприводе кранов-манипуляторов [5—7]. Е. Н. Власов и соавторы провели анализ работы гидравлического манипулятора лесной машины с цикловой системой управления [8]. Работа по оптимизации параметров гидропривода механизма подъёма [9] и поворота стрелы манипуляторов в Воронежском государственном лесотехническом университете имени Г. Ф. Морозова успешно ведётся под руководством профессора П. И. Попикова [10—12]. Вопросами исследования динамики процессов занимались С. М. Ситник и Р. Ту [13]. Появляются новые разработки, повышающие надёжность стрелового оборудования в целом за счёт снижения всплесков давления и амплитуды раскачивания груза, совершенствуются гидроприводы манипуляторного оборудования, повышается их энергоэффективность [14—17].
В области совершенствования гидрооборудования машин манипуляторного типа широкое применение нашёл метод математического моделирования, с помощью которого ещё при проектировании можно получить динамические характеристики разрабатываемого оборудования.
В ходе сплошных рубок и рубок ухода за лесом для вывозки сортиментов и хлыстов широко используются погрузочно-транспортные машины, оснащённые манипуляторами.
Это обусловлено их универсальностью и экономической эффективностью. Однако, как показывает анализ динамики гидроприводов лесных манипуляторов, при подъёме стрелы в рабочих процессах возникают значительные динамические нагрузки, что приводит к резким скачкам давления рабочей жидкости и снижению производительности и надёжности гидроманипуляторов.
Известно, что в машинах манипуляторного типа отказы в работе гидропривода составляют до 30 % от общего числа поломок. Максимальные нагрузки на манипулятор приходятся во время переходных процессов разгона и торможения движущих звеньев. Количество таких процессов в одном цикле работы зависит от количества разгонов и торможений.
От характера изменения и значений динамических нагрузок, возникающих в переходных режимах, зависит надёжность конструкции. Следовательно, для создания и внедрения манипуляторов высокого уровня необходимо более глубокое изучение вопросов кинематики, динамики и компоновки гидроцилиндров. Цель работы — лабораторное исследование работы гидропривода нового грузоподъёмного механизма манипулятора и определение его оптимальных параметров, обеспечивающих снижение динамической нагруженности и повышение производительности лесного манипулятора.
2. Материалы и методы
Схема предлагаемого гидропривода грузоподъёмного механизма манипулятора представлена на рисунке 1.
При подъёме грузов рабочая жидкость из маслобака насосом направляется гидрораспределителем по подводящему трубопроводу в поршневую полость гидроцилиндра. Так как управляемый клапан нормально закрыт, рабочая жидкость из штоковой полости гидроцилиндра привода грузоподъёмной стрелы поступает по трубопроводу с обратным и нормально закрытым управляемым обратным клапанами в его поршневую полость, обеспечивая ускоренное перемещение грузоподъёмной стрелы. Когда лесной манипулятор останавливается в промежуточном положении, происходит отключение поршневой и штоковой полостей гидроцилиндра, который отвечает за привод грузоподъёмной стрелы. Это отключение осуществляется с помощью гидрораспределителя, который обеспечивает изоляцию этих полостей от гидросистемы. В результате этого действия подводящий и отводящий трубопроводы становятся запертыми, что предотвращает дальнейшее движение рабочей жидкости. Стрела какой-то период времени по инерции движется вверх, и это поднимает давление в штоковой полости гидравлического цилиндра. Таким образом, происходит сжатие рабочей жидкости, а также упругих элементов, находящихся в рукавах высокого давления, которые подключены к запертым трубопроводам. Поршень в гидроцилиндре вытесняет определённый объём рабочей жидкости, который образуется в результате инерционной нагрузки, действующей на манипулятор.
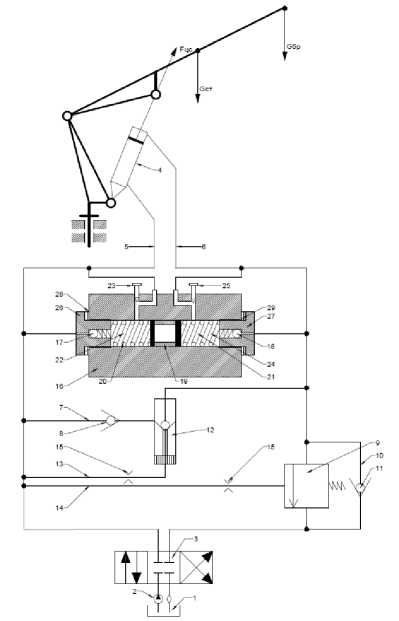
Рисунок 1. Схема гидропривода грузоподъёмного механизма манипулятора с действующими на него силами (Fсц — усилие на штоке гидроцилиндра привода грузоподъёмной стрелы, Gст — сила тяжести грузоподъёмной стрелы, Gст — сила тяжести груза: 1 — маслобак; 2 — насос; 3 — гидрораспределитель; 4 — гидроцилиндр привода грузоподъёмной стрелы; 5 – подводящий трубопровод; 6 — отводящий трубопровод; 7, 10 — трубопроводы с обратными клапанами; 8, 9, 11, 12, 17, 18 — обратный клапан, 13, 14 — линии управления; 15 — дроссельный демпфер; 16 — дополнительный демпфер, 19 — пустотелый плунжер; 20, 21 — пружины сжатия; 22 — левая полость дополнительного демпфера; 23, 25 — регулируемый дроссель; 24 — правая полость дополнительного демпфера; 26, 27 — резьбовая пробка; 28, 29 — регулировочная шайба [12]
Figure 1. Diagram of the hydraulic drive of the lifting mechanism of the manipulator with the acting forces on it (Fsc is the force on the rod of the hydraulic cylinder of the lifting boom drive, Gst is the gravity of the lifting boom, Gst is the gravity of the load: 1 — oil tank; 2 — pump; 3 — hydraulic distributor; 4 — hydraulic cylinder for lifting boom drive; 5 — supply pipeline; 6 — discharge pipeline; 7, 10 — pipelines with check valves; 8, 9, 11, 12, 17, 18 — check valve, 13, 14 — control lines; 15 — throttle damper; 16 — additional damper, 19 — hollow plunger; 20, 21 — compression springs; 22 — left cavity of the additional damper; 23, 25 — adjustable throttle; 24 — right cavity of the additional damper; 26, 27 — threaded plug; 28, 29 — adjusting washer [12]
Вытесненная рабочая жидкость уходит в правую полость дополнительного демпфера посредством обратного клапана, затем плунжер перемещается влево, пружина сжатия сжимается. Одновременно закрывается обратный клапан, а рабочая жидкость из левой полости демпфера перетекает через отведённый канал и специальный дроссель в трубопровод, возвращаясь в поршневую полость основного гидравлического цилиндра механизма подъёма стрелы. Таким образом, дросселирование рабочей жидкости приводит к торможению стрелы плавно. Это важно для предотвращения резких движений и обеспечения стабильности манипулятора.
После завершения этого процесса пустотелый плунжер возвращается в своё исходное положение благодаря разжатию пружины сжатия, что завершает цикл работы системы. Таким образом, вся система работает слаженно, обеспечивая безопасное и эффективное управление грузоподъёмной стрелой лесного манипулятора. Система управления гидравлическим приводом грузоподъёмной стрелы лесного манипулятора представляет собой сложный механизм, обеспечивающий плавное и контролируемое движение стрелы. Ключевым элементом этой системы является дополнительный демпфер, состоящий из двух полостей (левой и правой). Для точной регулировки расхода рабочей жидкости в этих полостях используются резьбовые пробки, а также регулировочные шайбы. Правильная настройка этих элементов критически важна: расход рабочей жидкости в демпфере должен точно соответствовать объёму жидкости, вытесняемой при движении штока и поршня в гидроцилиндре, обеспечивая плавность работы и предотвращая рывки. Это значит, что система тщательно сбалансирована, чтобы компенсировать изменения объёма рабочей жидкости в гидроцилиндре, вызванные его перемещением. Неправильная регулировка может привести к нестабильной работе системы, повышенному износу компонентов и даже к поломкам. Предохранительный клапан служит защитой от перегрузки системы, предотвращая повреждение компонентов при превышении допустимого давления. После закрытия клапанов гидроцилиндр работает на полную мощность, обеспечивая быстрое и эффективное опускание стрелы. Конструктивно управляемый клапан и обратный клапан могут быть объединены, например, в гидрозамке, который может быть встроен в отводящий трубопровод, что делает конструкцию значительно проще. Для ещё более значимого упрощения схемы линии управления можно также частично объединить и подключить к трубопроводу в конкретной точке, что поспособствует надёжности системы и сводит к нулю вероятность потерь рабочей жидкости. Выбор конкретного варианта закрытого управляемого обратного клапана определяется требованиями к производительности, надёжности и стоимости системы. Каждый из возможных вариантов имеет свои преимущества и недостатки, и выбор оптимального решения зависит от конкретных условий эксплуатации лесного манипулятора. Важно отметить, что все элементы системы должны быть тщательно подобраны и настроены для обеспечения оптимальной работы всего механизма, обеспечивая плавное и безопасное управление грузоподъёмной стрелой. Любое отклонение от заданных параметров может привести к неисправностям и опасным ситуациям. Переход от быстрого к медленному движению поршня гидроцилиндра, отвечающего за подъём стрелы, обусловлен изменениями внешней силы и регулировкой клапана. Рабочее давление клапана, как правило, задаётся немного ниже максимально допустимого в системе. Клапан открывается при давлении, лишь незначительно превышающем давление свободного сброса жидкости из цилиндра через гидрораспределитель обратно в резервуар. Демпферы настраиваются для исключения рывков в работе гидроцилиндра, снижая тем самым динамические нагрузки. При остановке опускания стрелы, инерция продолжает её движение, повышая давление в поршневой полости цилиндра. Жидкость из цилиндра по трубопроводу и через клапан поступает в левую камеру демпфера, приводя в движение плунжер. Затем жидкость из правой камеры демпфера, проходя через дроссель, перетекает в штоковую полость цилиндра. Ограничение потока жидкости дросселем позволяет погасить скачок давления при остановке стрелы, обеспечивая её замедление. Небольшая масса и скорость движения плунжера позволяют жидкости проходить через демпфер за половину времени колебаний стрелы, тем самым останавливая эти колебания.
Общий вид гидроманипулятора с новым демпфером приведён на фото. Манипулятор включает стрелу и поворотную колонну. Гидросистема манипулятора посредством гибких шлангов соединена с насосной группой. Новый демпфер с использованием гибких шлангов подключен к поршневой и штоковой полостям гидроцилиндра механизма подъёма стрелы. В трубопроводы демпфера интегрирован датчик давления рабочей жидкости производства Danfoss 6.

Фото. Общий вид гидроманипулятора ЛВ-210-01 с новым демпфером и насосной станцией [фото авторов]
Photo. General view of the LV-210-01 hydraulic manipulator with a new damper and pumping station
Исследования гидроманипулятора ЛВ-210-01 с новым демпфером проводились при следующих условиях:
■ вылет 2,72 м;
■ высота подъёма 4,8 м;
■ глубина опускания 2 м;
■ масса груза 100 кг;
■ номинальное давление 20 МПа;
■ номинальный расход 26 л/мин;
■ гидрораспределитель Badestnost 5-408.
3. Результаты
Подъём и опускание проходили с изменениями положения дросселя, когда он открыт на 40 %; 60 %; 80 %; 100 %.
Исследования предполагали построение регрессионных моделей влияния параметра демпфера (степень открытия дросселя демпфера принято за фактор х) при подъёме и опускании стрелы гидроманипулятора на время подъёма (опускания), на давление в гидросистеме при подъёме (опускании), на количество колебаний давления в гидравлической системе при подъёме (опускании); с последующей оптимизацией вышеназванного параметра демпфера.
Таким образом функции отклика: у 1 , м/с — время подъёма; у 2 , м/с — время опускания; у 3 , МПа — давление в гидравлической системе при подъёме; у 4 , МПа — давление в гидравлической системе при опускании; у 5 , шт. — количество колебаний давления в гидравлической системе при подъёме; у 6 , шт. — количество колебаний давления в гидравлической системе при опускании.
Результаты эксперимента представлены в таблице 1.
Таблица 1. Результаты эксперимента
Table 1. Experimental results
|
х |
у 1 |
у 2 |
у 3 |
у 4 |
у 5 |
у 6 |
|
0,4 |
9,8 |
11,8 |
1,1 |
0,4 |
45 |
52 |
|
0,6 |
3,9 |
11,6 |
1,25 |
0,3 |
21 |
33 |
|
0,8 |
2,9 |
9,3 |
1,9 |
0,5 |
8 |
16 |
|
1 |
7,1 |
4,1 |
3,1 |
0,9 |
15 |
8 |
Анализ диаграммы рассеяния для степени открытия дросселя и времени подъёма стрелы (рисунок 2) позволяет предположить наличие нелинейной полиномиальной зависимости между данными переменными.
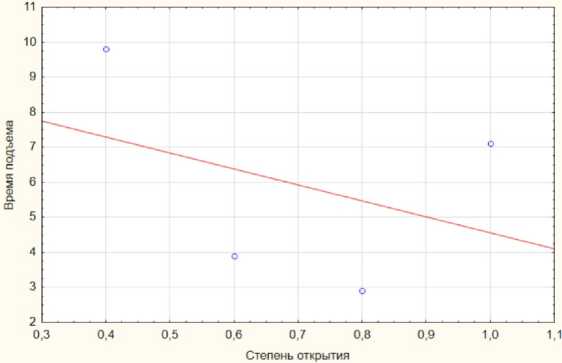
Рисунок 2. Диаграмма рассеяния для степени открытия дросселя и времени подъёма стрелы
Figure 2. A scattering diagram for throttle opening degree and boom lifting time
Анализ диаграммы рассеяния для степени открытия дросселя и времени опускания стрелы (рисунок 3) позволяет предположить наличие нелинейной полиномиальной зависимости между данными переменными.
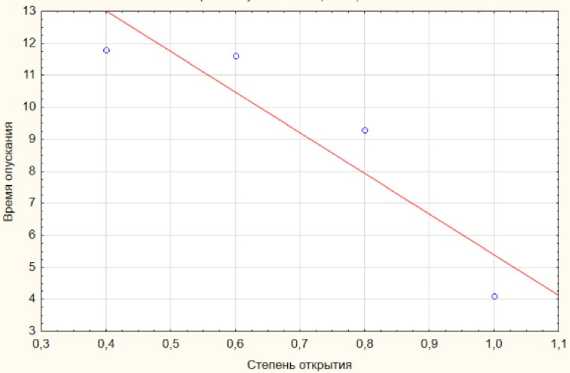
Рисунок 3. Диаграмма рассеяния для степени открытия дросселя и времени опускания стрелы
Figure 3. A scattering diagram for throttle opening degree and boom lowering time
Анализ диаграммы рассеяния для степени открытия дросселя и давления в гидравлической системе при подъёме стрелы (рисунок 4) позволяет предположить наличие нелинейной полиномиальной зависимости между данными переменными.
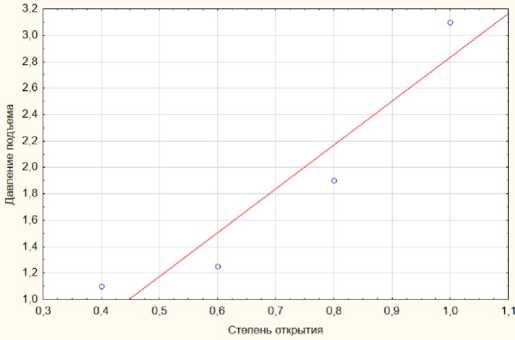
Рисунок 4. Диаграмма рассеяния для степени открытия дросселя и давления в гидравлической системе при подъёме стрелы
Figure 4. A scattering diagram for the degree of throttle opening and pressure in the hydraulic system when lifting the boom Scattering diagram for throttle opening degree
Анализ диаграммы рассеяния для степени открытия дросселя и давления в гидравлической системе при опускании стрелы (рисунок 5) позволяет предположить наличие нелинейной полиномиальной зависимости между данными переменными.
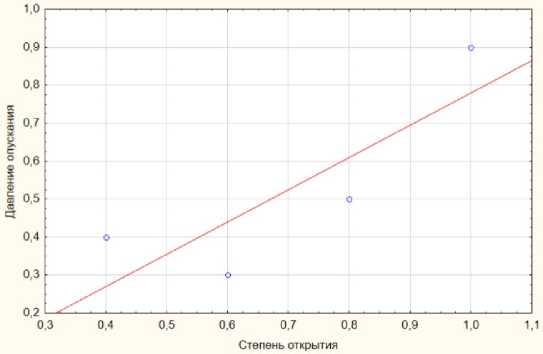
Рисунок 5. Диаграмма рассеяния для степени открытия дросселя и давления в гидравлической системе при опускании стрелы
-
Figure 5. A scattering diagram for the degree of throttle opening and pressure in the hydraulic system when lowering the boom
Анализ диаграммы рассеяния для степени открытия дросселя и количества колебаний давления в гидравлической системе при подъёме стрелы (рисунок 6) позволяет предположить переменными.
наличие нелинейной полиномиальной зависимости между данными
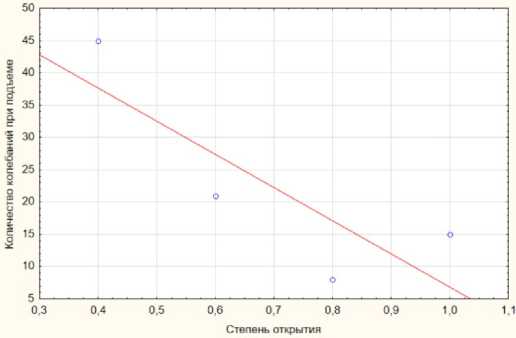
Рисунок 6. Диаграмма рассеяния для степени открытия дросселя и количества колебаний давления в гидравлической системе при подъёме стрелы
-
Figure 6. A scattering diagram for the degree of throttle opening and the amount of pressure fluctuations in the hydraulic system when lifting the boom
Анализ диаграммы рассеяния для степени открытия дросселя и количества колебаний давления в гидравлической системе при опускании стрелы (рисунок 7) позволяет предположить наличие линейной зависимости между данными переменными.
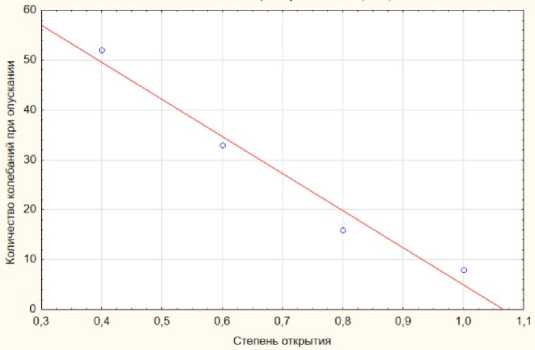
Рисунок 7. Диаграмма рассеяния для степени открытия дросселя и количества колебаний давления в гидравлической системе при опускании стрелы
-
Figure 7. A scattering diagram for the degree of throttle opening and the amount of pressure fluctuations in the hydraulic system when lowering the boom
Уравнения регрессии будут иметь вид для:
-
■ линейной модели — y i = bi 0 + b i1 • x ;
-
■ полиноминальной модели — y i = bi 0 + Ь л • x + bi 2 • x 2 .
Расчёт коэффициентов уравнений регрессии и оценку полученных данных выполним в программе Statistica.
На основании расчётов получим регрессионные модели:
у = 63,13 х 2 - 92,93 х + 36,89 (1)
Уровень значимости уравнения р = 0,012 < 0,05; значение F -критерия Фишера составило 3293,7, что превышает критическое значение, следовательно, модель считаем адекватной; коэффициент детерминации R 2 = 0,99984.
Из диаграммы рассеивания остатков для отклика у 1 (рисунок 8) видно, что их распределение практически не отличается от нормального.
у 2 =- 31,25 х 2 + 31,05 х + 4,34 (2)
Уровень значимости уравнения р = 0,028 < 0,05; значение F -критерия Фишера составило 601,7, что превышает критическое значение, следовательно, модель считаем адекватной; коэффициент детерминации R 2 = 0,9975.
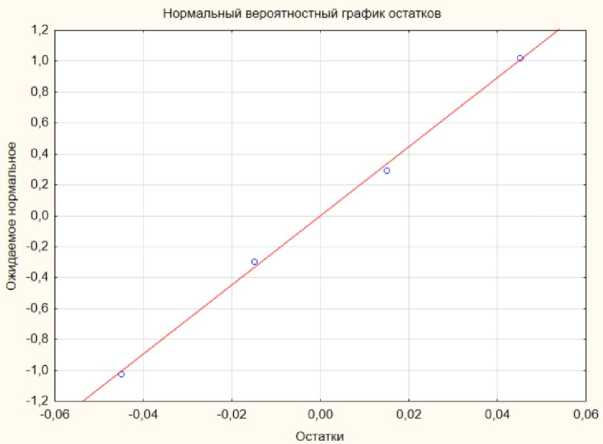
Рисунок 8. Диаграмма рассеяния остатков для отклика у 1
-
Figure 8. Residue scattering diagram for the y 1 response
Из диаграммы рассеивания остатков для отклика у 2 (рисунок 9) видно, что их распределение практически не отличается от нормального.
Рисунок 9. Диаграмма рассеяния остатков для отклика у 2
-
Figure 9. Residue scattering diagram for the y 2 response
у 3 = 6,56 х 2 - 5,86 х + 2,397
Уровень значимости уравнения р = 0,007 < 0,05; значение F -критерия Фишера составило 9947,0, что превышает критическое значение, следовательно, модель считаем адекватной; коэффициент детерминации R 2 = 0,9999.
Из диаграммы рассеивания остатков для отклика у 3 (рисунок 10) видно, что их распределение практически не отличается от нормального.
Рисунок 10. Диаграмма рассеяния остатков для отклика у 3
-
Figure 10. Residue scattering diagram for the y 3 response
у 4 = 3,125 х 2 - 3,525 х + 1,3 (4)
Уровень значимости уравнения р = 0,047 < 0,05; значение F -критерия Фишера составило 207,0, что превышает критическое значение, следовательно, модель считаем адекватной; коэффициент детерминации R 2 = 0,9976.
Из диаграммы рассеивания остатков для отклика у 4 (рисунок 11) видно, что их распределение практически не отличается от нормального.
Рисунок 11. Диаграмма рассеяния остатков для отклика y 4
-
Figure 11. Residue scattering diagram for the y 4 response
у 5 = 193,75 х 2 - 322,75 х + 143,55 (5)
Уровень значимости уравнения р = 0,038 < 0,05; значение F -критерия Фишера составило 95,15, что превышает критическое значение, следовательно, модель считаем адекватной; коэффициент детерминации R 2 = 0,9948.
Из диаграммы рассеивания остатков для отклика у5 (рисунок 12) видно, что их рас- пределение практически не отличается от нормального.
Рисунок 12. Диаграмма рассеяния остатков для отклика y 5
-
Figure 12. Residue scattering diagram for the y 5 response
у 6 =- 74,5 х + 79,4
Уровень значимости уравнения р = 0,014 < 0,05; значение F -критерия Фишера составило 67,89, что превышает критическое значение, следовательно, модель считаем адекватной; коэффициент детерминации R 2 = 0,9713.
Из диаграммы рассеивания остатков для отклика у 6 (рисунок 13) видно, что их распределение практически не отличается от нормального.
Рисунок 13. Диаграмма рассеяния остатков для отклика y 6
-
Figure 13. Residue scattering diagram for the y 6 response
Выполним многоцелевую оптимизацию для нахождения оптимального значения величины открытия дросселя нового демпфера, которой обеспечивает максимальную производительность гидропривода лесного манипулятора с минимальной динамической нагружен-ностью. Поставленная задача относится к задачам нелинейного программирования с ограни- чениями, будем её решать методом аддитивного и сформулируем так (7):
Q _ ^у”рм- t=1
при условии 0,4 ≤ х ≤ 1, где Q — обобщённый свёртывания критериев оптимизации
min
параметр, определим как линейную
комбинацию нормированных по максимальному значению откликов (у 1норм , … , у 6норм ) с весовыми коэффициентами соответственно λ 1 , … , λ 6 .
Определив по регрессионным моделям максимумы и минимумы целевых функций у i + = у iмах ; у i – = у iмin , найдём коэффициенты относительного разброса ( δ i ) по выражению (8):
S t =
y t -y - _ 1 y +
- y i
- У +
Минимальные и максимальные значения откликов, рассчитанные по уравнениям регрессии, представлены в таблице 2.
Таблица 2. Минимальные и максимальные значения откликов
Table 2. Minimum and maximum response values
|
Отклик |
Максимум |
Величина фактора |
Минимум |
Величина фактора |
|
У 1 |
9,8 |
0,4 |
2,69 |
0,74 |
|
У 2 |
12,05 |
0,51 |
4,14 |
1 |
|
У 3 |
3,1 |
1 |
1,08 |
0,45 |
|
У 4 |
0,9 |
1 |
0,31 |
0,56 |
|
У 5 |
45 |
0,4 |
9,14 |
0,82 |
|
У 6 |
52,6 |
0,4 |
7,65 |
1 |
Отсюда: δ 1 = 0,726, δ 2 = 0,626, δ 3 = 0,652, δ 4 = 0,656, δ 5 = 0,799, δ 6 = 0,855.
Весовые коэффициенты определим по выражению (9)
^ i _ S t / XLk =i 8k , ^ =1Л _1. (9)
Тогда λ 1 = 0,167, λ 2 = 0,151, λ 3 = 0,15, λ 4 = 0,151, λ 5 = 0,184, λ 6 = 0,197. Нормированные по максимальному значению отклики определим так:
норм _ у i у i _ У + - (io)
Численно решая при помощи надстройки «Поиск решения» в Excel поставленную задачу, найденное оптимальное значение степени открытия дросселя демпфера 0,78 (78 %).
4. Заключение
Таким образом, в результате проведено экспериментальное исследование гидропривода лесного манипулятора с новым демпфером, обеспечивающим повышение производительности гидропривода и снижающим его динамическую нагруженность.
Получены регрессионные модели влияния технологического параметра нового демпфера (степени открытия дросселя) гидропривода лесного манипулятора на показатели его работы (время подъёма и опускания стрелы манипулятора, давление в гидравлической системе при подъёме и опускании стрелы манипулятора, количество колебаний давления в гидравлической системе при подъёме и опускании стрелы манипулятора).
Установлено, что с увеличением степени открытия дросселя демпфера гидропривода лесного манипулятора время подъёма стрелы сначала снижается до величины открытия дросселя 0,74, а затем увеличивается; время опускания стрелы снижается; давление в гидравлической системе при подъёме и опускании стрелы повышается; количество колебаний давления в гидравлической системе при подъёме снижается до величины открытия дросселя 0,82, а затем растёт; количество колебаний давления в гидравлической системе при опускании снижается.
Кроме того, определено оптимальное значение степени открытия дросселя демпфера 0,78 (78 %), при котором обеспечивается максимальная производительность гидропривода лесного манипулятора с минимальной динамической нагруженностью гидросистемы.
