Оптимизация слаломной траектории на криволинейном склоне

Автор: Рудаков Р.Н., Лисовский А.Ф., Гайсина А.Р., Хитрюк В.В.
Журнал: Российский журнал биомеханики @journal-biomech
Статья в выпуске: 2 (20) т.7, 2003 года.
Бесплатный доступ
Рассматривается задача оптимизации слаломной траектории при спуске горнолыжника по модельной трассе на криволинейном склоне. Из сопоставления экспериментальных и расчетных данных найдены гидродинамические силы и силы сопротивления движения лыж при их врезании в снег на поворотах. Построена кусочно-полиномиальная траектория с двумя варьируемыми параметрами. Найдены значения угла входа в поворот и радиуса кривизны траектории при обходе шеста, минимизирующие время спуска при заданном периоде траектории. Исследовано влияние на оптимальное значение параметров траектории отклонения ворот от осевой линии наибольшего ската.
Слаломная траектория, оптимизация, аэродинамические силы, силы трения
Короткий адрес: https://sciup.org/146215760
IDR: 146215760 | УДК: 531/534:57+612.7
Текст научной статьи Оптимизация слаломной траектории на криволинейном склоне
Решается задача математического моделирования прохождения горнолыжником слаломной трассы. Ранее в работах [1, 2] из сопоставления опытных и расчетных данных были найдены аэродинамический параметр системы лыжник–лыжи при спуске горнолыжника по снежному склону и усредненное значение коэффициента сопротивления скольжению лыж, обусловленного врезанием кантов лыж в снег при выполнении поворотов.
В настоящей работе рассматривается проблема спуска на горных лыжах по трассе, особенно важная для спортсменов-горнолыжников. Она состоит в том, что при прохождении соревновательной трассы спортсмены должны так формировать траекторию спуска, чтобы время движения было минимальным. Исходя из этого, в работе рассматривается задача минимизации времени прохождения горнолыжником размеченной шестами горнолыжной трассы.
При решении задачи принято допущение о замене системы лыжник–лыжи одной материальной точкой, расположенной в общем центре масс и движущейся по склону, а при определении угла наклона лыжника рассматривается модель невесомого стержня с материальной точкой на конце.
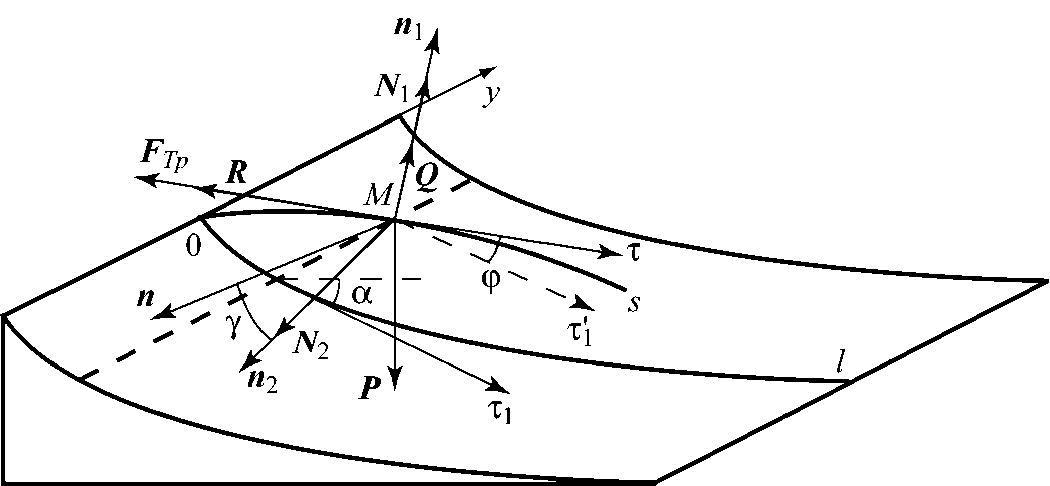
Рис. 1. Геометрия слаломной траектории и силы, действующие на систему лыжник–лыжи
Уравнения движения точки по криволинейной поверхности в естественных координатах
Рассмотрим движение лыжника по цилиндрической поверхности, образующая которой горизонтальна, а касательная τ1 к линии наибольшего ската l составляет угол α с горизонтальной плоскостью (рис. 1). Профиль склона в этом случае можно задать уравнением a = а о - 1- l рад, (1)
RC где l — криволинейная координата, отсчитываемая от l = 10 по линии наибольшего ската, а0 - значение угла при l = l0, а RC - переменный радиус кривизны склона.
Рассмотрим движение лыжника как движение материальной точки, которая движется по траектории
У = У (l),(2)
где y – ee отклонение от осевой линии наибольшего ската l . В произвольной точке M касательная к траектории τ составляет угол ϕ с касательной τ 1 к линии наибольшего ската в этой же точке. Значение угла ф находится по формуле
Ф = arctg у ’.(3)
Здесь и далее штрих означает производную по l .
Рассматривая движение лыжника как движение материальной точки, совпадающей с центром масс, запишем II закон И. Ньютона m a = F ,(4)
где m – масса системы лыжник–лыжи, a – ускорение ее центра масс, F – главный вектор всех внешних сил, действующих на эту систему.
Левую и правую части уравнения (4) спроектируем на оси, связанные как с траекторией, так и с поверхностью горы [ 3 ] . Выберем в качестве естественных осей следующие оси: τ – касательную к траектории, n 1 – нормаль к поверхности горы, направленную к центру кривизны линии наибольшего ската, n 2 – нормаль к траектории, лежащую в плоскости, касательной к поверхности горы в данной точке траектории. Главная нормаль n к траектории отходит от поверхности из-за ее изгиба и составляет угол γ с осью n 2 (рис. 1).
Введем орты касательной φ0 и главной нормали n0 к траектории. Тогда ускорение точки может быть записано в виде a = aT ф о + an n o, (5)
а уравнение (4) с учетом формул касательного и нормального ускорений примет вид:
( dV X V 2 )
m "ЗГФо + —n о
^ dt p J
= F ,
где V – скорость точки, ρ – радиус кривизны траектории. Проектируя левую и правую части (6) на оси естественного трехгранника Mτn 1 n 2 , получим уравнения:
dV V 2 V 2 ds m— = Ft , m—siny = Fm , m — cos Y = Fn,, V = — • dt ρ 1 ρ 2 dt
Здесь s – криволинейная координата, отсчитываемая от начального значения s 0 по траектории.
Проведем через касательную т плоскость, перпендикулярную к поверхности в точке M . Получим нормальное сечение поверхности, радиус кривизны которого в точке М обозначим через RN . Кроме того, рассечем поверхность соприкасающейся плоскостью Мтп и получим наклонное сечение, которое составляет угол 90 ° -у с нормальным сечением. По теореме Менье радиус кривизны наклонного сечения, совпадающий с радиусом кривизны траектории ρ , находится по формуле:
P = R n sin y .
Радиус кривизны RN может быть найден через главные кривизны K 1 и K 2 в данной точке поверхности по формуле Эйлера:
—— = K cos2 ф + K 2 sin2 Ф,
RN 1 2
где ϕ – угол между произвольно ориентированным нормальным сечением и сечением с кривизной K 1 .
Подставляя формулу (8) в уравнения (7), получим естественные уравнения движения по траектории, лежащей на любой криволинейной поверхности:
dV V 2
mH" = F T , mRN = Fn i ,
V 2 ds m------= Fn,, V = —•
RN tg γ 2 dt
Для цилиндрического склона горы эти уравнения существенно упрощаются.
Главные кривизны склона K 1 = 1/ RC , K 2 = 0 . Тогда из формулы (9) получим
RC
RN = 2
cos ϕ
.
Из геометрических построений легко находится угол γ . Он удовлетворяет уравнению
r tgY = Ch ’ RN
где rC – радиус кривизны траектории (2), лежащей на плоском склоне, который может быть определен по формуле:
_ 7 (i + y ' 2) 3 rC = |y 1
.
Подставим (11) и (12) в уравнения (10) и получим естественные уравнения движения точки по цилиндрической поверхности:
dV V 2 2
m— = FT , m—cos Ф = Fnx , dt RC 1
mV 2
rC
ds
Fn 2 , V dt
В частном случае плоского склона достаточно в уравнениях (14) положить RC = да , тогда ось n 2 совпадет с главной нормалью к траектории n .
Силы, действующие на лыжника при движении по слаломной траектории
На рис. 1 изображены внешние силы, действующие на лыжника при его движении по слаломной траектории. На него действует сила тяжести P , сила лобового сопротивления R , подъемная сила Q , сила трения Fтр и реакция снежного покрова склона с составляющими N 1 и N 2 :
P = mg, R = 2pSCdV2, Q = 2pSclV2, Fmp = f>2 + N2, где g – ускорение свободного падения, ρ – плотность воздуха, S – площадь миделя системы лыжник–лыжи, f – коэффициент трения лыж о снег, CD и CL – аэродинамические коэффициенты лобового сопротивления и подъемной силы. Составляющие реакции N1 и N 2 будут определены ниже. Главный вектор всех внешних сил
F = P + R + Q + F + N + N2 . тр
Его проекции на естественные оси координат в соответствии с рис. 1 запишутся в виде
F T = P sin a cos ф - R - Fmp,
Fn 1 = ( — mg cos a
+ Q + N 1) • I
I « 'U
y
F n 2 =- mg sin a sin Ф г^ + N 2 .
В формуле (17) в рассматриваемом случае вогнутой горы «’ < 0. В формуле (18) знак первого слагаемого в правой части зависит от угла между осями τ 1 и n 2 . Если угол острый, то знак плюс, в противном случае – минус.
Если подставить формулы (16)–(18) в уравнения (14), то получатся естественные уравнения движения лыжника по цилиндрическому склону горы с учетом действующих на него сил. Эти уравнения приводятся к двум дифференциальным уравнениям первого порядка следующего вида:
m^— = mg sin « cos ф - R - fJN 2 + N 2 , — = V . (19)
dt 1 2 dt
Здесь mV2 cos2 ф\а'\
N 1 =--—1 + mg cos a - Q > 0,
Rca mV2 , _ ■
--+ mg sin a sin ф т, rc|У
-
1 7 17
R = - p SC d V 2, Q = - pSC l V 2.
Искомые функции удовлетворяют начальным условиям:
t = 0: 5 = 5 0, V = V0.(21)
Задача Коши (19)–(21) решается численно методами пошагового интегрирования. На каждом шаге по времени, кроме V и s , определяются криволинейная координата l , углы α и ϕ .
Определение коэффициента сопротивления скольжению лыж в повороте
При врезании кантов лыж в снег на поворотах приходит значительное торможение лыжника, существенно возрастает сила трения лыж о снег. В работе [ 2 ] выполнена оценка коэффициента сопротивления f по сравнению времени спуска горнолыжника по модельной трассе и времени, найденного из решения задачи (19)– (21). Было найдено среднее значение коэффициента, хотя очевидно, что его величина зависит от глубины врезания кантов лыж в снег. В данной работе мы предлагаем новую методику оценки коэффициента сопротивления скольжению лыж в поворотах.
Во время практических экспериментов, проведенных на горнолыжной базе «Снежинка» (г. Чайковский Пермской области), был промерен профиль склона на участке горнолыжной трассы. Обработка результатов измерений показала, что вогнутый профиль склона близок к поверхности цилиндра и имеет радиус RC , равный
520 метрам [1]. Начальный угол склона α 0 составил 32,8
радиан. При
произвольном значении криволинейной координаты l угол склона определяется по формуле (1).
На промеренном участке были проведены два эксперимента. В первом эксперименте измерялось время прямого спуска горнолыжника в средней стойке без поворотов на трассе длиной 180 м. Для системы лыжник – лыжи общей массой 78,08 кг среднее время спуска составило 10,32±0,03 с. Из сопоставления этого времени с расчетным временем на трассе был найден аэродинамический параметр системы µ, который характеризует воздействие всех аэродинамических сил: М = S (Cd - fCL).
Коэффициент µ оказался равным 0,46 [2].
Во втором эксперименте была проведена модельная разметка реальной трассы таким образом, чтобы траекторию спуска горнолыжника можно было представить следующей моделью. Модель имеет, как и трасса, участок прямого разгона длиной пять метров, а далее движение горнолыжника с обходом симметрично расположенных ворот происходит по синусоиде. Положение тела горнолыжника в среднем соответствует позе прямого спуска в предыдущем эксперименте. Уравнение синусоиды следующее:
2 π y = a sin ( L"l ) ,
где: амплитуда a — 4 м, а период синуса L — 20 м. Общая длина спуска по линии наибольшего ската составляет 180 м. Среднее время спусков для того же лыжника, найденное в опыте, оказалось равным 39,60±0,04 с. [2].
Для определения расчетного времени спуска было принято, что коэффициент сопротивления движению лыж в поворотах линейно зависит от тангенса угла наклона лыжника к нормали к поверхности. В одноточечной модели лыжника (материальная точка на конце невесомого стержня) получается, что тангенс этого угла равен отношению составляющих реакции лыжни N 2 N 1 (20). Тогда
f — 0,05 + K ^.
N
При этом вблизи точек перегиба траектории горнолыжника при переходах от одного поворота вокруг шестов разметки трассы к другому составляющая N 2 проходит через нулевое значение и коэффициент сопротивления f равен коэффициенту трения 0,05, как это принималось при прямом спуске без поворотов.
При решении задачи Коши (19)-(21) было принято, что коэффициент CL = 0, а ранее найденный аэродинамический параметр и — SCD составил величину 0,46. Численное решение задачи Коши дало время спуска t — 39,6 с при K — 0,25. На каждом периоде синусоиды коэффициент f изменяется от 0,05 до максимального значения. Как и следовало ожидать, наибольшее значение коэффициент сопротивления движению принимает при обходе горнолыжником шеста разметки трассы, в этом случае угол наклона лыжника к нормали по отношению к поверхности доходит до 66 градусов, а значение f max до 0,6.
Модель траектории (23) при заданных a и L не имеет варьируемых параметров. Поэтому была предпринята попытка построения периодической траектории движения горнолыжника из полиномов достаточно высокого порядка таким образом, чтобы некоторые параметры траектории можно было изменять.
Варьируемая модель слаломной траектории
Сначала для заданных амплитуды a и периода L построена одна четверть периода L траектории у 1 — у 1 ( 1 1 ) . Считалось, что на осевой линии ( 1 1 — 0) задается угол входа в поворот ϕC и эта точка кривой является точкой перегиба, а при обходе флажка
( 1 1 — L /4) радиус кривизны траектории составляет величину b :
1 1 = 0 : y i = 0, y 1 = tg ^c , у" = 0,
-
1 1 = L : У 1 = a , У ‘= 0, У " = - 1.
4 b
Построим траекторию в виде полинома
У 1 — C i + c 2^1 + c з^1 + c 4^1 + c 5^1 + c 0^1 .
Выполнение условий (25) определяет коэффициенты Ci :
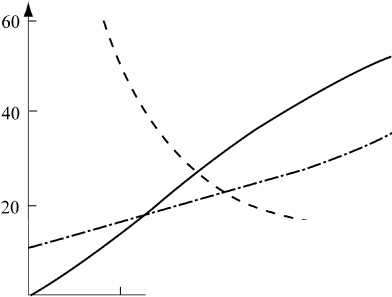
Ф р , град
10 х b, м t, с
Рис. 2. Зависимость оптимального угла входа в поворот ф Р (сплошная линия), радиуса кривизны траектории b при обходе шеста (штриховая линия) и времени спуска t (штрих-пунктир) от расстояния ворот а до осевой линии при периоде траектории L =20 м
3 а, м
C i = 0, C 2 = tg фc , C 3 = 0,
C 4 = Ц- 1 i0 a — 6 L 4tg фc
L 4 1
—
-г L 2 1
2b 4 )
,
i (1
•
C 5 =7Т| — i5 a + 8 L 4 tg ф C + L 4 I ,
L4 I
C 6 = | i2 а — 6 L 4 tg фc — ^ L 4 1 , L 4 = L
2 L4 у 2 b )4
Полученная часть траектории достраивается до полного периода. Пусть переменная l изменяется от 0 до L . При построении траектории y ( l ) учтена следующая симметрия кривой:
0 < l < L /4: l i = l , y ( l ) = y i ( l i );
L /4 < l < L /2: l i = L /2 — l , y ( l ) = y i ( l i );
L /2 < l < 3 L /4: l i = l — L /2, y ( l ) = — y i( l i); 3 L /4 < l < L : l i = L — l , y ( l ) = — y i( l i).
Строится требуемое число периодов кривой и получается зависимость y ( l ) на всей модельной трассе.
Минимизация времени спуска по модельной слаломной трассе при следующей расстановке ворот: a = 4 м, L = 20 м. На рис. 2 показана зависимость оптимального угла входа в поворот ϕP и соответствующего радиуса кривизны траектории b при обходе шеста, а также времени спуска t от отклонения ворот a от осевой линии при периоде L = 20 м.
В проведенном исследовании получен оптимальный угол входа в поворот ϕP , осредненный по всем периодам трассы. Учет различия углов ϕP на разных периодах траектории существенно усложняет задачу оптимизации. Эти различия будут тем меньше, чем меньше различаются скорости входа в поворот на разных периодах траектории движения центра масс системы лыжник–лыжи.
Заметим еще, что при минимизации времени спуска не ставилось ограничение на величину радиуса кривизны траектории при обходе шеста, который зависит от многих факторов, и в результате найдена идеальная траектория, дающая минимальное время спуска. Ограничения на радиус кривизны траектории при обходе флажка увеличивают время спуска, которое можно рассчитать по предлагаемой методике для конкретной трассы и конкретного горнолыжника.
И, наконец, пока не учитывалась асимметрия траектории до и после обхода шеста. Из-за разного влияния силы тяжести на реакцию склона на этих участках может оказаться, что некоторая асимметрия будет более благоприятна для спуска.
Заключение
В результате проведенной работы рассмотрено движение горнолыжника по модельной горнолыжной трассе на криволинейном аналоге реального склона. Составлены естественные дифференциальные уравнения движения горнолыжника, учитывающие кривизну склона горы. Из сопоставления расчетного времени спуска по горнолыжной трассе со временем, полученном в эксперименте, был найден коэффициент сопротивления скольжению лыж на снегу в предположении его зависимости от угла наклона лыжника к нормали к склону горы.
Найдены оптимальные параметры траектории: угол входа горнолыжника в поворот и радиус кривизны траектории движения центра масс системы лыжник–лыжи при обходе шеста, при которых время прохождения трассы минимально.
Таким образом, в работе впервые дано теоретическое обоснование и решена задача минимизации времени прохождения горнолыжником размеченной шестами горнолыжной трассы в сделанных авторами допущениях.
Полученные результаты представляют интерес для теории и методики горнолыжного спорта, для тренеров и спортсменов-горнолыжников и могут быть использованы для постановки новых экспериментов.
