Опыт применения CAD/CAM технологий при проектировании и изготовлении волновых передач

Автор: Сивуда М.Ю., Шарков О.В., Либерман И.В.
Журнал: Технико-технологические проблемы сервиса @ttps
Рубрика: Методические основы совершенствования проектирования и производства технических систем
Статья в выпуске: 1 (75), 2026 года.
Бесплатный доступ
Рассматривается подход к проектированию и изготовлению волновых передач с телами качения основанный на генерации 2D-профилей рабочих элементов передачи для последующего создания их 3D- моделей, которые изготавливаются с применением аддитивных технологий или станков с ЧПУ. Дается описание программы для автоматической генерации 2D-профилей элементов. Представлены результаты создания волновой передачи с использованием технологии 3D-печати.
Автоматизированное проектирование, волновая передача, тела качения, аддитивные технологии, станки с ЧПУ
Короткий адрес: https://sciup.org/148332872
IDR: 148332872 | УДК: 004.94:621.833.6
Experience in using CAD/CAM technologies in designing and manufacturing wave transmissions
The article considers an approach to the design and manufacture of wave transmissions with rolling elements based on the generation of 2D profiles of the transmission working elements for the subsequent creation of their 3D models, which are manufactured using additive technologies or CNC machines. A description of a program for automatically generating 2D profiles of elements is provided. The results of creating a wave transmission using 3D printing technology are presented.
Текст научной статьи Опыт применения CAD/CAM технологий при проектировании и изготовлении волновых передач
Волновые зубчатые передачи относятся к относительно новому типу механических передач, в которых передача движения происходит за счет волнового деформирования одного из элементов механизма – зубчатого колеса, змеевидной пружиной и др. [1–4].
Наиболее перспективным типом таких передач являются волновые передачи с телами качения, в которых вместо гибкого колеса применяется внутренняя обойма с сепаратором и установленными там телами качения. Они обладают наименьшими массо-габаритными характеристиками на единицу передаваемой мощности при одинаковом передаточном числе. В настоящее время волновые передачи с телами качения находят широкое применение в различном технологическом оборудовании [5–6].
Передача (рис.1) имеет внутренний генератор волн, состоящий из внутренней обоймы 1
(эксцентрика), установленной с эксцентриситетом, при вращении которой происходят радиальные перемещения тел качения 2, установленных между внешней 3 и внутренней 1 обоймами, и удерживаемых с помощью сепаратора 4. Внешняя обойма 3 выполнена в виде жесткого колеса, имеющего профильные выступы на внутренней поверхности. Тела качения 2 контактируют с рабочими поверхностями профильных выступов внешней обоймы 3 и рабочей цилиндрической поверхностью внутренней обоймы 1. В качестве тел качения могут быть использованы как шарики, так и ролики. Выходным звеном могут служить внутренняя или внешняя обойма, при фиксации одной из них относительно корпуса.
Несмотря на существующие теоретические и экспериментальные исследования в области волновых передач с телами качения [5–12],
EDN JYILSN
этот вопрос изучен далеко не полностью. Отсутствует общепринятая методика их расчета и проектирования. В связи с этим разработка и апробирование различных подходов по их проектированию является актуальным.
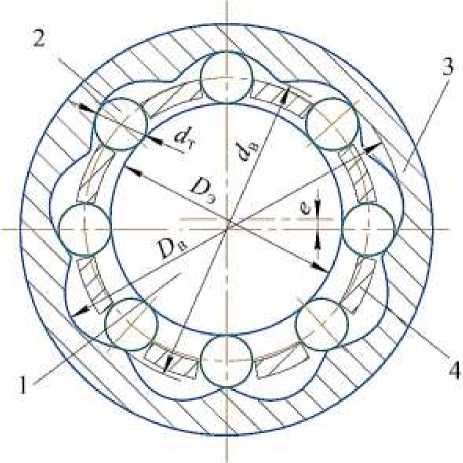
Рисунок 1 – Конструктивная схема волновой передачи с телами качения
Для определения геометрических характеристик волновой передачи воспользуемся подходами, изложенными в работах [13, 14]. Будем использовать систему уравнений, основанную на задании кинематических и конструктивных параметров ( i – передаточное число и d – диаметр тел качения) и одном параметре, выбираемом конструктивно ( D – диаметр впадин внешней обоймы).
Число тел качения и профильных выступов внешней обоймы определяется соответственно по формулам z Т = ic, (1)
и z В = ( i + 1) c , (2)
где c – кратность передачи (для одноволновых генераторов c =1).
Основные конструктивные параметры передачи определяются по следующим формулам.
Эксцентриситет генератора волн e = 0,2 dT.
Диаметр выступов внешней обоймы dВ = DB - 4e.(4)
Диаметр эксцентрика
D э = 2 гэ,(5)
где r – радиус эксцентрика, гэ = 0,5 DB + e — dT.
Рассчитанные геометрические параметры проверяют на условие собираемости –диаметр впадин должен удовлетворять условию отсутствия подрезания профиля
D в ^
2( dTk )
sin
n
4 z в J
где k – коэффициент запаса (обычно k =1,03– 1,05).
Внутренний профиль внешней обоймы строится как эквидистанта к траектории центров тел качения. Его координаты задаются как функция полярного угла 0 :
Г x ( 0 ) = l ( 0 )sin( 0 ) + 0,5 d Т sin( 0 + x ( 0 ));
{ y ( 0 ) = l ( 0 )cos( 0 ) + 0,5 d T cos( 0 + x ( 0 )). ( )
Здесь вспомогательные функции определяются следующим образом:
s(0) = V(r? + 0,5dТ )2 — (esln(zВ0))2 ;(8)
l (0) = e cos(zB 0) + s (0);(9)
( z^esln(z„0)A X(0) = arctanl В ’ .(10)
V s(0)
Сила, действующая на одно тело качения, определялась как
F Т
2 M
D В z Н
где M – максимальный момент на выходном валу; z – число одновременно нагруженных тел качения (z„ ® 0,5z^).
НТ
Далее выполняется проверочный расчет по условию контактной прочности [15, 16].
Представленные выражения (1)–(11) были использованы при реализации программы для проектирования волновых передач с телами качения. Программа предназначена для расчета, инженерного анализа и выбора рациональных конструктивных параметров волновых передач, обеспечивающих заданные эксплуатационные характеристики и создание базовой технической документации. При написании программы использован язык программирования Python 3.9.
Функциональные возможности программы (рис. 2) обеспечивают ввод и редактирование исходных данных; расчет геометрии и профилей рабочих элементов передачи, возникающих сил и контактных напряжений; интерактивную визуализацию полученных результатов.
Исходными данными для расчета являются геометрические (внешний диаметр передачи; диаметры тел качения, диаметры подшипника и вала), кинематические (передаточное число) и нагрузочные (передаваемый вращающий момент) характеристики передачи.
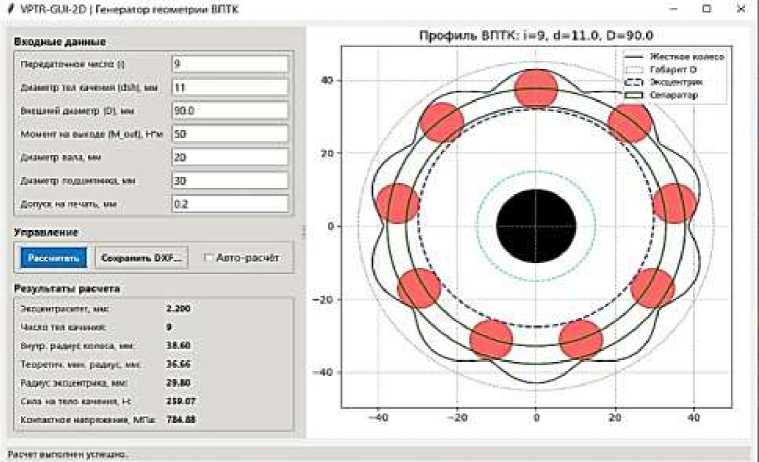
Рисунок 2 – Интерфейс программы
В результате расчета генерируются геометрические и конструктивные параметры рабочих элементов передачи – число тел качения, эксцентриситет и радиус внутренней обоймы, внутренний радиус внешней обоймы и др. Дополнительно рассчитываются силы действующие на тела качения и возникающее контактное напряжение между рабочими элементами.
Программа позволяет на основании результатов расчетов выполнять генерацию 2D-чертежей в формате dxf рабочих профилей конструктивных элементов передачи. Формат dxf (Drawing Exchange Format) является универсальным и позволяет экспортировать полученные результаты в различные САПР системы, как отечественные – Компас 3D и T-FLEX, так и зарубежные – SolidWorks; Autodesk Inventor и др. [17, 18]. В САПР полученные рабочие профили конструктивных элементов операциями трехмерного твердотельного моделирования используются для создания 3D-моделей. В дальнейшем на основании 3D-моделей происходит изготовление конструктивных элементов передачи с использование 3D-принтера или станков с ЧПУ. Например, SolidWorks или Autodesk Inventor Series/Professional позволяет использовать интегрированный модуль SolidCAM для автоматизированного создания управляющих программ для токарных и фрезерных станков с ЧПУ [18–20].
В качестве примера рассмотрим использование предлагаемой методики при создании волнового редуктора для привода проектируемого лабораторного робота-манипулятора серии «LabAssist-M1».
Разрабатываемый робот «LabAssist-M1» относится к классу коллаборативных роботов (коботов) малого класса, предназначенных для автоматизации рутинных операций в химических и биологических лабораториях. В условиях ограниченного рабочего пространства вытяжных шкафов и ламинарных боксов к таким роботам предъявляются жесткие требования по массогабаритным характеристикам.
Традиционные промышленные манипуляторы, использующие массивные планетарные редукторы, часто не подходят для таких задач из-за их веса и габаритов. Кроме того, специфика лабораторной работы требует высокой плавности хода для предотвращения расплескивания жидкостей, что делает применение обычных зубчатых передач с их характерным люфтом нежелательным.
Ключевым узлом, определяющим точность и динамику робота, является привод его плечевого сустава. Именно здесь требуется обеспечить максимальный крутящий момент при минимальных габаритах. Для привода второй оси (плеча) робота был выбран волновой редуктор с промежуточными телами качения по следующим причинам:
-
1. Высокая кинематическая точность и отсутствие люфта. В отличие от эвольвентных передач, где зазор необходим для компенсации теплового расширения, волновые передачи работают с предварительным натягом. Это критически важно для точного позиционирования дозатора над пробиркой.
-
2. Компактность. Передача обеспечивает большое передаточное отношение в одной ступени при малом осевом размере. Это позволяет спрятать привод внутрь корпуса манипулятора, сделав его дизайн обтекаемым и удобным для санитарной обработки.
-
3. Технологичность изготовления. Для лабораторных прототипов и мелкосерийного производства использование классических волновых передач с гибким колесом (Flexspline) затруднительно из-за сложности изготовления тонкостенного стакана из легированной стали. Передача с телами качения заменяет сложный гибкий элемент на набор стандартных роликов или шариков и сепаратор, который может быть легко изготовлен методами аддитивных технологий (3D-печати) или на станках с ЧПУ.
-
4. Демпфирующая способность. За счет множественного контакта тел качения передача обладает способностью гасить вибрации, возникающие при шаговом режиме работы двигателя, что повышает стабильность удерживания инструмента.
В данном проекте требовалось спроектировать передачу, которая может быть интегрирована непосредственно в сочленение манипулятора диаметром не более 90 мм при передаточном отношении 18. Стандартные решения, доступные на рынке, являются дорогостоящими или не подходят по крепежным габаритам. Поэтому было принято решение спроектировать редуктор с использованием разработанного программного обеспечения и изготовить основные элементы (кроме тел качения и подшипников) из PETG-пластика методом FDM–печати для проверки собираемости и кинематики.
На первом этапе с использованием программы был сгенерирован 2D-профиль основных рабочих элементов и рассчитаны геометрические, силовые и прочностные параметры передачи.
На втором этапе 2D-профиль был экспортирован в программный комплекс SolidWorks, где были созданы 3D-модели рабочих элементов (рис. 3 и 4).
На третьем этапе методом 3D печати были изготовлены полученные трехмерные модели (рис. 5 и 6).
Рассмотренный подход позволяет автоматизировать проектирование волновых передач с телами качения для приводов машин в целях ускорения процесса проектирования, повышения точности и достоверности результатов расчетов, а также снизить временные и экономические затраты при их изготовлении.
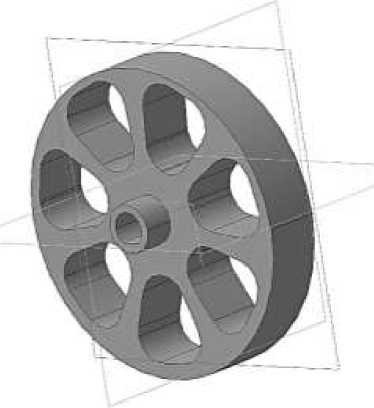
Рисунок 3 – 3D-модель внутренней обоймы передачи
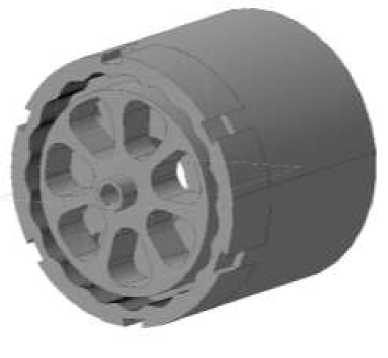
Рисунок 4 – 3D-сборка волновой передачи со снятой крышкой (без тел качения)

Рисунок 5 - Внутренняя обойма волновой передачи

Рисунок 6 – Сборка элементов (внутренняя обойма, крышка, сепаратор, тела качения) волновой передачи
