Организация прямого двигательного управления при наклонах корпуса человека

Автор: Александров А.В., Фролов А.А.
Журнал: Российский журнал биомеханики @journal-biomech
Статья в выпуске: 3 (49) т.14, 2010 года.
Бесплатный доступ
Исследуется организация двигательного управления при наклонах корпуса человека. Используется двухсуставная биомеханическая модель тела. Анализ проводится в терминах движения вдоль собственных векторов динамического уравнения («собственных», или «естественных», синергий). По доминирующему суставу в каждой из естественных синергий они названы Н- и А-синергиями (Н - Hip, тазобедренный, А - Ankle, голеностопный). Обсуждаются две точки зрения на организацию двигательного управления в живых системах: 1) теория равновесной точки, подразумевающая «статическое» управление, т.е. управление равновесным положением биомеханической системы; 2) теория внутренних нейронных моделей, подразумевающая «динамическое» управление, т.е. непосредственный контроль силами мышц, которые рассчитываются с учетом геометрических и инерционных характеристик системы путем решения обратной задачи динамики. Результаты исследования показывают, что при выполнении наклона корпуса в сагиттальной плоскости у человека наблюдаются оба типа организации двигательного управления. При этом управление по Н-синергии организовано по первому типу, а управление по А-синергии - по второму.
Биомеханическая модель тела человека, синергия, наклон корпуса, двигательное управление
Короткий адрес: https://sciup.org/146215997
IDR: 146215997 | УДК: 531/534:
Текст научной статьи Организация прямого двигательного управления при наклонах корпуса человека
В литературе, посвященной теории двигательного управления в живых системах, обсуждаются две точки зрения на его организацию: 1) теория равновесной точки (РТ), подразумевающая управление равновесным положением биомеханической системы, и 2) теория внутренних нейронных моделей (ВНМ), подразумевающая непосредственный контроль силами мышц.
В соответствии с теорией РТ [9], мышечные усилия, обеспечивающие выполнение движения, определяются двумя факторами: во-первых, изменением желаемой контролируемой центрально-равновесной конфигурацией тела (“ reference frame ”, [9]) и, во-вторых, механизмом автоматической («пассивной») генерации мышечных сил по обратной связи (ОС) в ответ на отклонение текущей (реально наблюдаемой) его конфигурации от желаемой равновесной. Таким образом, под прямым управлением (ПУ) в данной теории подразумевается управление изменением равновесной конфигурации тела и параметрами петли ОС, но не непосредственный контроль мышечных усилий или непосредственный контроль наблюдаемой
Александров Алексей Владимирович, к.б.н., с.н.с. Института высшей нервной деятельности и нейрофизиологии, Москва
Фролов Александр Алексеевич, д.б.н., к.ф.-м.н., профессор, заведующий лабораторией математической нейробиологии обучения, Москва кинематики. При этом петля ОС характеризуется достаточно большими коэффициентами усиления, чтобы обеспечить успешное (устойчивое) выполнение двигательной задачи.
В теории двигательного управления на основе ВНМ [16, 23], в отличие от теории РТ, механизм ОС существенной роли в управлении движением не играет. Предполагается, что в ВНМ «выучены» геометрические и инерционные характеристики тела. Нервная система «заранее» программирует желаемую кинематику движения и, с учетом ВНМ, рассчитывает необходимые для ее реализации мышечные силы путем решения обратной задачи динамики. Рассчитанные «запрограммированные» силы непосредственно генерируются исполнительным нейромышечным аппаратом для выполнения желаемого движения. Иными словами, если в теории РТ центральное ПУ связывается с управлением равновесным положением системы («статикой»), а силы генерируются автоматически по петле ОС, то в теории ВНМ под непосредственным ПУ находятся действующие в системе силы («динамика»), а значение механизмов ОС невелико. Считается, что некоторая коррекция мышечных сил по ОС происходит только при наличии неожиданных возмущений, приводящих к отличию наблюдаемой кинематики от желаемой. При этом коэффициенты усиления в петле ОС недостаточны, чтобы без прямого управления силами обеспечить близкое совпадение желаемой и наблюдаемой кинематики [13].
Справедливость одной из этих теорий двигательного управления при интерпретации экспериментальных данных определяется путем оценки коэффициентов усиления в петле ОС. Если они достаточно велики для успешного выполнения движения при относительно простой форме сигнала ПУ [14] без непосредственного управления силами мышц, то разумно предположить, что ПУ происходит «статически» согласно теории РТ, в противоположном случае – «динамически» согласно теории ВНМ.
Стандартной процедурой для определения параметров сигнала ПУ и петли ОС является неожиданное возмущение выполняемого целенаправленного движения [3, 7, 11]. Использование данной процедуры позволяет экспериментатору разделить эффекты команд ПУ и управления по ОС при организации моторного контроля. Так, характерное время коррекции сигнала ПУ со стороны центральной нервной системы (ЦНС) в ответ на возмущение велико (порядка 5–10 с в случае прямого стояния человека [15]) по сравнению со временем автоматической коррекции по ОС (1–2 с). Поэтому коррекция мышечных усилий в начальной фазе ответа на возмущение происходит по ОС, а сигнал ПУ остается в этой фазе таким же, как и при «невозмущенном» выполнении наклона корпуса. Полагая, как принято в большинстве работ [2, 6–8, 11, 19–21], что управление по ОС является линейным, сравнение возмущенного и невозмущенного движений в их начальной фазе позволяет исключить из динамического уравнения член, определяющий априори неизвестный временной ход сигнала ПУ. После такого исключения появляется возможность рассчитать параметры петли ОС, а, зная эти параметры и полагая в первом приближении, что они неизменны на протяжении всего двигательного акта, можно оценить и временной ход изменения сигнала ПУ и таким образом получить полное описание двигательного управления на биомеханическом уровне.
В предыдущей работе авторов [3] параметры петли ОС оценивались при выполнении наклона корпуса в сагиттальной плоскости у человека. Возмущение производилось путем неожиданного сдвига опорной платформы назад приблизительно на 8 см за 300 мс. В этой работе рассматривались три модели петли ОС. В первой модели (ОС1), как и в работах [2, 6–8, 11, 19, 20], петля ОС моделировалась в виде линейной вязкоэластичной пружины с временной задержкой. Коэффициент, определяющий изменение мышечных усилий в ответ на отклонение конфигурации тела от желаемой, называется жесткостью, а в ответ на отклонение скорости от желаемой – вязкостью. Во второй модели (ОС2), как и в работе [21], в петлю ОС дополнительно включался член, определяющий зависимость мышечных сил от отклонения ускорения от желаемого. В третьей модели (ОС3), как и в работе [21], предполагалось, что линейной пружинной модели удовлетворяют не сами мышечные силы, а активность мышц, оцениваемая по электромиограмме (ЭМГ). При этом преобразование активности мышц в силы определялось инерционным звеном первого порядка с постоянной времени 40 мс.
Параметры каждой из трех моделей петли ОС оценивались в [3] двумя различными методами, широко используемыми во многих исследованиях: с помощью решения либо прямой, либо обратной задачи динамики. При решении обратной задачи рассчитываются моменты мышечных сил по наблюдаемой кинематике и проводится линейный регрессионный анализ зависимости моментов сил от суставных углов, их скоростей и ускорений [1–3, 5–7, 11]. Полученные регрессионные коэффициенты и рассматриваются как искомые параметры петли ОС. При решении прямой задачи рассчитывается кинематика по заданным моментам сил. При этом силы задаются с помощью некоторой модели петли ОС, полученная кинематика сравнивается с наблюдаемой, и параметры петли ОС оптимизируются так, чтобы расчетная кинематика минимально отличалась от наблюдаемой [8, 17, 19, 21]. В этом случае в качестве искомых параметров петли ОС используются полученные оптимальные параметры.
В работе [3] было показано, что оба метода дают близкие значения параметров петли ОС, а дополнительный учет зависимости мышечных сил от ускорения и учет инерционного звена первого порядка для преобразования мышечной ЭМГ активности в мышечные силы практически не влияют на точность аппроксимации экспериментальных данных. Однако влияние вида рассматриваемых моделей ОС на оценку временного хода сигнала ПУ (хода изменения равновесной конфигурации тела) ранее не исследовалось. В настоящей работе данные, полученные в [3], используются для оценки этого временного хода.
С биомеханической точки зрения, управление движением и позой стоящего человека является достаточно сложной задачей. Последнее связано с тем, что тело человека представляет собой многозвенную биомеханическую цепь, так что движение в любом отдельно взятом суставе приводит к необходимости вырабатывать корректирующие силовые моменты во всех суставах. Сложность управления усугубляется тем, что наиболее массивный сегмент (корпус) расположен высоко над площадью опоры, размеры которой малы (ограничены длиной стоп). В предыдущих работах авторов [1, 4] было показано, что управление позой и движением у стоящего человека значительно упростилось бы, если в качестве независимых единиц двигательного управления ЦНС использовать движения вдоль собственных векторов динамического уравнения («естественные синергии»). В дальнейших работах [2, 3, 5, 6] было экспериментально подтверждено, что ЦНС действительно использует такую возможность и естественные синергии управляются независимо как напрямую, так и по обратной связи. При использовании трехсуставной модели тела (голеностопный, коленный и тазобедренный суставы) существуют три такие синергии. По доминирующему суставу их можно назвать А- (Ankle – голеностопный сустав), H- (Нip – тазобедренный сустав) и К- (Knee – коленный сустав) синергиями. Было показано, что поведенческие функции Н- и А-синергий существенно различаются. Непосредственно наклон обеспечивается Н-синергией, в то время как А-синергия является вспомогательной и служит для компенсации смещения центра тяжести CG (CG – Centre of Gravity), вызываемого этим наклоном. Именно это функциональное различие, по-видимому, обусловливает наблюдаемые изменения параметров петли ОС в случае выполнения целенаправленного наклона корпуса по сравнению со спокойным стоянием: в Н-синергии усиление в петле ОС возрастает, а в А-синергии снижается. В частности, жесткость в Н-синергии при выполнении наклона увеличивается приблизительно в полтора раза по сравнению с вертикальным стоянием. Увеличение жесткости в петле ОС типично при выполнении целенаправленных движений [11, 13, 14], поскольку именно такие движения непосредственно обеспечивают выполнение поведенческой задачи и поэтому должны контролироваться ЦНС «более жестко». В отличие от Н-синергии жесткость в А-синергии уменьшается до значения, нейтрализующего гравитационные силы, так что любая конечная конфигурация тела в А-синергии является нейтрально устойчивой. Тем самым любая конфигурация тела в А-синергии, достигаемая после завершения наклона, является допустимой для ЦНС, если она не приводит к выходу горизонтальной проекции CG за границы опоры, а значит и не приводит к потере равновесия. Функциональное различие Н- и А-синергий и различие в их управлении по ОС позволяет предположить, что в этих синергиях будет существенно различаться и характер изменения сигнала ПУ. Проверка данной гипотезы и является основной целью данного исследования.
Модель и методы
Протокол эксперимента
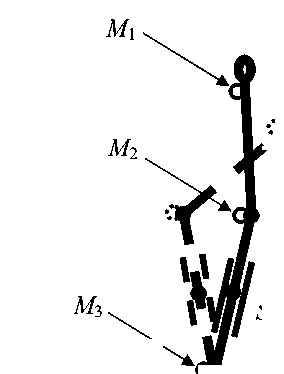
В экспериментах принимали участие пять здоровых испытуемых мужского пола в возрасте от 30 до 53 лет и весом от 73 до 99 кг. Максимально быстрый наклон корпуса вперед на приблизительно 40º из вертикального положения выполнялся в ответ на короткий звуковой сигнал. После завершения движения испытуемый сохранял наклонное положение в течение приблизительно 2 с. Коленные суставы испытуемого были блокированы с помощью специальных шин (рис. 1). Блокировка коленей производилась для упрощения анализа полученных данных, позволяя ограничиться двухзвенной биомеханической моделью тела испытуемого – корпус и нижние конечности, с вращением в двух цилиндрических суставах – голеностопном и тазобедренном.
M 3
S
>>>>>»»
Рис. 1. Расположение маркеров M1–M3 на теле испытуемого, совершающего быстрый наклон корпуса вперед в сагиттальной плоскости при блокированных с помощью специальных шин S коленях
Три светоотражательных маркера ставились на правую сторону тела: M 1 – плечо ( acromion ), M 2 – таз ( femoral trochanter ) и M 3 – стопа ( external malleolus ). Координаты маркеров регистрировались с помощью системы ELITE [10] с частотой опроса 100 Гц. Погрешность измерения координат маркеров составляла 0,78 мм. Угол наклона корпуса относительно вертикали определялся по линии, соединяющей маркеры М 1 – М 2 , а нижних конечностей – по линии М 2 – М 3 . Коленные суставы блокировались с помощью специальных шин, что позволяло ограничиться в настоящей работе рамками двухзвенной биомеханической модели.
Все данные для каждого испытуемого усреднялись по пробам, и процесс обработки проводился по усредненным данным с использованием стандартных методов статистического анализа (пакет программ SPSS ). Оценка вариабельности средних показателей по всем испытуемым приводится в виде «среднее±среднеквадратичное отклонение» ( Mean±SD ).
Представление движения в виде суперпозиции естественных синергий
Динамика движения тела человека в сагиттальной плоскости рассматривается в линейном приближении на основе модели двух твердых тел, вращающихся вокруг идеальных цилиндрических шарниров, моделирующих голеностопный и тазобедренный суставы. В работе [4] было показано, что для углов наклона корпуса Δ по отношению к вертикали, не превышающих 55º, среднюю ошибку вычисления суставных углов при решении прямой задачи динамики в линейном приближении по сравнению с точным решением можно оценить по формуле ε ≈ E Δ3, где коэффициент Е для испытуемого со «стандартными» антропометрическими параметрами (рост 1,7 м, масса 70 кг) составляет около 0,04 рад–2 и относительная ошибка (ε / Δ) – менее 4%.
Экспериментальный протокол включал два типа движений: с возмущениями в виде неожиданного сдвига опоры во время выполнения наклона либо без возмущений на неподвижной опоре. Сравнение этих движений позволило вычислить параметры петли обратной связи у каждого из пяти испытуемых при выполнении ими наклона корпуса [3]. В настоящей работе полученные ранее значения этих параметров используются для расчета временного хода сигнала прямого управления. Для этого анализируются только записи движений на неподвижной опоре. В этом случае уравнение движения имеет вид
Сф - Dф = T , (1)
где φ – вектор углов в тазобедренном и голеностопном суставах, C и D – инерционная и гравитационная матрицы, T – вектор суставных моментов, создаваемых мышечными усилиями. В векторах φ и Т первая и вторая компоненты относятся соответственно к голеностопному и тазобедренному суставам.
Выражения для расчета элементов матриц C и D по антропометрическим параметрам приведены в работе [3]. Индивидуальные антропометрические параметры испытуемых рассчитывались с помощью стандартных таблиц [22] с учетом их веса, роста и длин звеньев тела.
Линейное приближение позволяет представить движение в виде суперпозиции двух составляющих («естественных синергий»), каждая из которых является движением вдоль одного из двух собственных векторов w i уравнения (1), определяемых уравнением
Cw , =l , Dw„ (2)
где λ i – собственные значения. Индексы i = H , А соответствуют доминированию тазобедренного ( H p ) или голеностопного ( Ankle ) суставов в каждом из собственных векторов [3].
Представление уравнения (1) в терминах естественных синергий предполагает преобразование вектора суставных углов φ ( t ) в вектор «кинематических амплитуд» ξ ( t ) путем обращения уравнения
φ ( t ) = W ξ ( t ), (3)
где столбцы матрицы W – собственные векторы w i , а каждая из компонент вектора ξ ( t ) определяет временной ход движения вдоль соответствующего собственного вектора.
«Динамические амплитуды» η i для моментов мышечных сил в каждой из собственных синергий вычисляются путем подстановки (3) в (1). Принимая во внимание (2), получаем два независимых скалярных динамических уравнения для каждой из естественных синергий
-λiξi +ξi =ηi,(4)
где векторы динамических амплитуд η
η(t) = U-1T(t),(5)
а матрица
U = -DW определяет вклад каждой синергии в суммарные моменты сил в отдельных суставах. Как видно из (3) и (5), уникальным свойством движения вдоль собственного вектора уравнения (1) является линейная связь между изменениями суставных углов (кинематическая синергия) и одновременно линейная связь между изменениями суставных моментов (динамическая синергия). Именно поэтому эти два движения логично назвать естественными синергиями.
Каждое из уравнений (4) эквивалентно уравнению движения для перевернутого маятника с моментом инерции λ i . Взаимосвязь между перемещениями центра тяжести CG и центра давления CP , X iCG и X iCP , а также между соответствующими кинематическими и динамическими амплитудами, ξ i и η i , имеет вид
X i CG = b i ξ i ; X i CP = b i η i , (7)
где выражения для коэффициентов b i приведены в [3].
Метод оценки временного хода сигнала ПУ
Оценка временного хода сигнала ПУ зависит от принятой модели петли ОС. Как отмечалось выше, в настоящей работе рассматриваются три модели управления по ОС: ОС1 – модель вязко-эластичной пружины без учета ускорения, ОС2 – с учетом ускорения и ОС3 – с учетом ускорения и инерционного звена преобразования мышечной активности в мышечные силы. В модели ОС1 полагается, что корректирующие суставные моменты линейно зависят от суставных углов и угловых скоростей с временной задержкой. В терминах естественных синергий вместо корректирующих суставных моментов рассматриваются динамические амплитуды η , а вместо суставных углов рассматриваются кинематические амплитуды ξ . В работе [3] было показано, что естественные синергии при выполнении целенаправленного наклона корпуса независимо управляются по ОС, как это было ранее показано в случае поддержания вертикального стояния [2, 6]. Тогда корректирующая динамическая амплитуда η i в каждой из синергий полностью определяется кинематической амплитудой ξ i только в данной синергии, т.е. при независимом управлении в каждой из синергий петля ОС1 описывается следующим уравнением:
n ( t ) =i 0 ( t ) + K S i , ( t -T i ) + K V U t -T , ), i = Н , А , (8)
где K iS и K iV – коэффициенты жесткости и вязкости в терминах естественных синергий, T i - временная задержка управления по ОС. Величина i ,0 является параметром, находящимся под прямым управлением ЦНС и определяющим текущую равновесную конфигурацию тела. При спокойном стоянии сигнал прямого управления i , 0 не изменяется и определяет желаемую равновесную конфигурацию при неподвижной позе i eq ( eq - equilibrium , равновесный). Из (4) и (8) следует, что при неподвижном стоянии и при K iS ≠ 1
i eq = i i 0 /( K S - 1). (9)
При выполнении наклона полное изменение сигнала i , 0 определяет амплитуду движения. Как было показано в [3], коэффициент жесткости K АS для А -синергии во время выполнения наклона близок к единице: K АS = 0,95±0,02, поэтому уравнение (9) для А -синергии неприменимо, и конечная равновесная конфигурация тела для этой синергии не определена: любая конфигурация, не приводящая к выходу горизонтальной проекции CG за границы опоры, является приемлемой, поскольку не приводит к потере равновесия. Напротив, для Н -синергии коэффициент жесткости K НS во время выполнения наклона отличался от единицы и составил около 1,7 ( K НS = 1,73±0,30), поэтому уравнение (9), однозначно определяющее конечную конфигурацию тела после выполнения наклона, справедливо только для H -синергии.
Для модели ОС2 уравнение (8) принимает вид
П , ( t ) =i 0 ( t ) + K? i , ( t -T , ) + K ,V i ,( t -T,) + K" i , ( t -T , ), i = Н , А , (10)
где последний член задает корректирующую поправку к мышечным силам с учетом ускорения.
Для модели ОС3 уравнение (10) принимает вид:
ЦП , ( t ) + n ( t ) =i° ( t ) + K ,s i , ( t -T , ) + K V i , .( t -T , ) + K ia i , .( t -T , ), i = Н , А , (11) где µ – постоянная времени инерционного звена преобразования активности мышц в силы, которая, следуя [21], принималась равной 40 мс. Нужно заметить, что наличие инерционного звена с постоянной времени ц в уравнении (11) эквивалентно, в некотором приближении, запаздыванию на величину ц всего сигнала в правой части дифференциального уравнения (10).
Очевидно, что для моделей ОС2 (10) и ОС3 (11) в случае спокойного стояния равновесная конфигурация тела для Н -синергии Ь Неч определяется тем же уравнением (9).
Комбинируя динамическое уравнение (4) с одним из уравнений (8), (10) или (11), получим уравнение для оценки временного хода сигнала прямого управления i , 0( t ) в зависимости от выбранной модели ОС. Для модели ОС1
ii0 (t) = -^iii(t) + ii(t)-K ii(t-Ti)-KVii(t-Ti), i =
Н , А , (12)
T , ), , = Н , А , (13)
для модели ОС2
i,0 (t }=-x, i, (t)+i( t) - K? i, (t-T,) - K*' i f( t-t,) - K-i X t - а для модели ОС3
i,(t)=ц [_^,4-(t)+i,(t) ]- ^^i(t)+i,(t)-- KS i, (t-t, ) - kv i ;(t-t, ) - Ka ^; xt-t,), ,=н , а
При Ki > 1, т.е. в случае Н-синергии, полученная величина Ёi0(t) может быть представлена в виде у (t)=Eeq (t) - к? ёчt), что соответствует представлению, например, модели ОС1 в виде n, (t )=v (t) + K? [ЁЛ t-Ti) S'" (t)] + к-Ё,(t-t,), где первое слагаемое соответствует мышечным усилиям, направленным на преодоление статических сил гравитации, а второе и третье слагаемые – на преодоление инерционных сил. При этом Ёeq(t) определяет текущую равновесную конфигурацию тела в том смысле, что если в любой момент времени t0 зафиксировать Ёeq(t) = Eieq(10) = const, то конфигурация тела Ei(t) будет стремиться к конфигурации Ёie(t0) как к равновесной стационарной конфигурации. В частности, если Eiie(t) изменяется достаточно медленно, то конфигурация Ei(t) будет всегда близка к Ёeq(t). Такая интерпретация сигнала ПУ Ei0(t) соответствует теории РТ [9].
Другая интерпретация сигнала Ё 0 ( t ), которая согласуется с теорией ВНМ с помощью решения обратной задачи динамики [16, 23] (т.е. с «динамической моделью» ПУ), соответствует представлению модели ОС1 в виде
n ( t ) =n com ( t ) + KS [ E ( t -t ) -E des ( t - 1 )] + K- [ E ( t - t ) -E des ( t -t )], (15)
где E des ( t ) — желаемый ( des - desired ) временной ход движения, а П com ( t ) = -ХЁ des ( t ) + E des ( t ) - временной ход команды ПУ мышечными силами, обеспечивающими желаемое движение. Требуемые силы генерируются ЦНС на основе решения обратной задачи динамики с помощью ВНМ, входом в которую является E des . В случае, когда реальное движение совпадает с желаемым ( E = E des ), второе и третье слагаемые в (15) равны нулю и мышечные силы полностью определяются центральной командой n com . Коррекция мышечных сил, рассчитанных с помощью ВНМ, производится только в случае, когда реальное движение отличается от желаемого, например, вследствие внешних возмущений. В рамках данной теории сигнал прямого управления E 0( t ), в соответствии с (15), представляется в виде
E 0 ( t ) =n com - ks e des ( t - t ) - к- E des ( t -t ) . (16)
Если принять, что ВНМ уже «обучена» так, что без внешних возмущений реальное движение совпадает с желаемым ( Ё = Ё des ), то уравнение (16) совпадает с (12).
Очевидно, что по экспериментальным данным, позволяющим только оценить по формулам (12)-(14) временной ход Ё 0 ( t ), в принципе невозможно отдать предпочтение организации ПУ в соответствии с теорией РТ или с теорией управления по ВНМ. В пользу первой теории говорит ее простота, так как в этом случае ЦНС требуется обучиться генерировать только статический управляющий сигнал E eq , определяющий статическую равновесную конфигурацию тела. При этом переход из одного статического состояния в другое происходит за счет простого изменения E eq от начального до конечного значения (например, с постоянной скоростью [9]). В пользу второй теории говорит ее универсальность, так как она объясняет способность ЦНС организовать движение со сколь угодно сложным характером изменения его траектории и скорости. Однако это достижимо за счет более сложного процесса формирования ВНМ для решения обратной задачи динамики . Таким образом, решающим аргументом в пользу выбора первой или второй теории для объяснения экспериментальных данных служит простота или сложность полученного управляющего сигнала E 0( t ). В настоящей работе его простота оценивается точностью его приближения при линейной зависимости от времени.
Результаты
Сигнал прямого управления в Н-синергии
Параметры петли ОС, необходимые для расчета сигнала прямого управления ξ H 0 по уравнениям (12)–(14) для каждого из пяти испытуемых, рассчитывались индивидуально. Использованные параметры были получены тремя разными способами: 1) с помощью решения обратной задачи динамики; 2) с помощью решения прямой задачи динамики с минимизацией ошибки для скорости перемещения CG или 3) с минимизацией ошибки для положения CG . Их значения, усредненные по всем испытуемым, приведены в работе [3]. Временной ход сигнала ПУ для каждого испытуемого рассчитывался по данным, осредненным по всем его движениям на неподвижной опоре. Каждый из испытуемых совершал по 5–7 таких движений, чередующихся в случайном порядке с движениями на неожиданно смещаемой платформе.
На рис. 2, а жирной сплошной линией представлена типичная зависимость ξ Н 0( t ) сигнала ПУ от времени, рассчитанная для одного из испытуемых методом решения обратной задачи динамики по модели ОС1. Данная модель обратной связи является наиболее простой по сравнению с моделями ОС2 и ОС3. Для наглядности, в соответствии с уравнениями (7) и (9), сигнал ПУ представлен на графике в терминах равновесного положения CG : CG Heq = b H ξ H 0/( K HS – 1). Результаты, полученные для других испытуемых и других использованных моделей и методов, качественно сходны с представленными на рис. 2, а .
Штриховой и пунктирной линиями представлены соответственно перемещения CG Н и CР H по Н -синергии в зависимости от времени. Видно, что при выполнении наклона корпуса вперед CG по данной синергии смещается назад, так как в этом движении отклонение ног назад преобладает над отклонением корпуса вперед. В каждом из двух равновесных положений тела (начальном вертикальном и конечном наклонном) значения координат CG Н , CР H и CG Heq , естественно, совпадают. В первой фазе выполнения наклона СР перемещается вперед, разгоняя СG назад, затем СР перемещается назад, обгоняя и тем самым тормозя СG . В отличие от перемещения СР , сигнал прямого управления CG Heq меняется монотонно. Движение инициируется перемещением равновесного положения CG Heq назад. Это приводит к отклонению текущего положения CG H от равновесного. В результате рассогласования текущего и равновесного положений CG возникают силы, увлекающие CG H вслед за CG Heq . Для большинства моделей ОС и методов расчета параметров петли ОС, использованных в [3], перемещение CG Heq заканчивается раньше, чем перемещение CG H , что согласуется с данными по исследованию движения руки [9]. В этом случае при приближении текущей конфигурации тела к конечной равновесной конфигурации «упругие силы ОС» исчезают и остановка движения происходит за счет «вязких сил ОС».
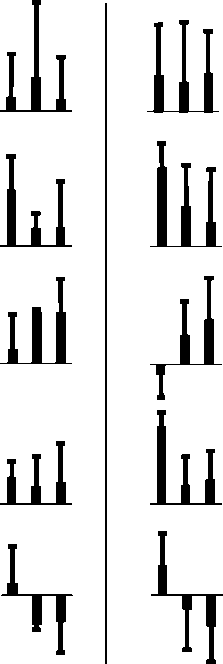
Тонкой сплошной линией на рис. 2, а показана аппроксимация CG Heq функцией CG Hlin , линейно изменяющейся по времени от начального до конечного значения CG Heq . Именно такой временной ход изменения равновесной конфигурации тела постулируется в теории РТ [9]. При построении CG Hlin подбирались моменты времени начала линейного отрезка t 1 и его конца t 2 (см. рис. 2, а ), обеспечивающие минимальную среднеквадратичную ошибку приближения. Как видно на рис. 2, а , такая линейная аппроксимация хорошо описывает характер изменения CG Heq . Ошибки аппроксимации в процентах к размаху перемещения CG Heq для всех моделей ОС и методов расчета параметров ОС приведены на рис. 3 (панель 4). В среднем по всем испытуемым, моделям и методам ошибка аппроксимации составила 5,2±3,1%.
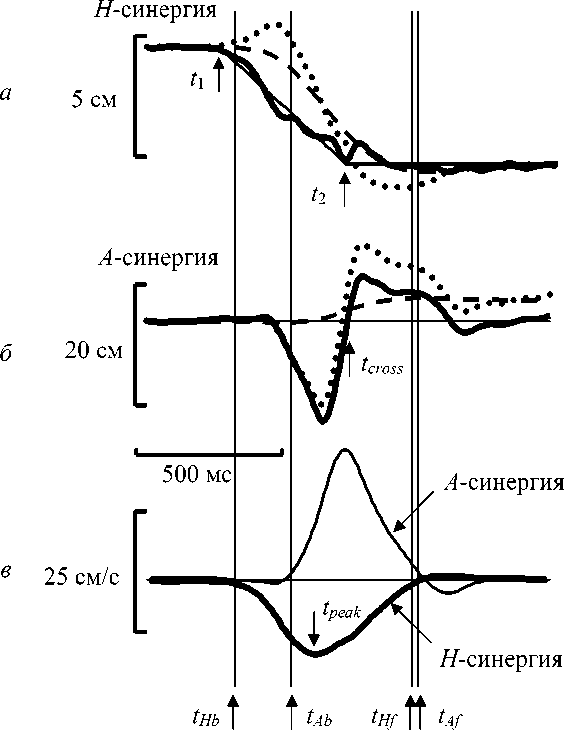
Рис. 2. Зависимость от времени перемещений по Н -синергии, панель ( а ), и по А -синергии, панель ( б ), для центра тяжести CG (штриховые линии) и центра давления CP (пунктирные линии). На панели ( а ) представлены также изменение равновесного положения центра тяжести для Н -синергии ( CG Heq , жирная сплошная линия) и аппроксимация CGH eq функцией CGH lin (тонкая сплошная линия), которая начинает изменяться в момент t 1 и прекращает – в момент t 2. На панели ( б ) жирной сплошной линией представлен сигнал ПУ для А -синергии. Результаты показаны в среднем по пробам с наклонами на неподвижной опоре для одного из испытуемых. Приведенные временные зависимости для сигналов ПУ были рассчитаны методом решения обратной задачи динамики по модели ОС1. На панели ( в ) показаны профили скоростей перемещения центра тяжести по Н -синергии (жирная линия) и по А -синергии (тонкая линия). Вертикальные линии показывают моменты начала t Hb , t Ab и окончания t Hf , t Af движения в каждой из синергий, рассчитанные по пятипроцентному порогу от соответствующей максимальной скорости. Момент достижения пика скорости CG H отмечен вертикальной стрелкой t peak
Моменты начала t Hb и окончания t Hf движения по Н -синергии, рассчитанные по пятипроцентному порогу от максимальной скорости перемещения CG H , показаны на рис. 2 соответствующими вертикальными линиями. Момент достижения пика скорости CG H обозначен на рис. 2, в как t peak .
На рис. 3 представлены три временных параметра для зависимостей, приведенных на рис. 2, а , в : разность ∆ t b = t Hb – t 1 между временами начала движения СG H и начала изменения CG Hlin (рис. 3, панель 1 ), разность ∆ t Hf = t Hf – t 2 между временами окончания движения СG H и окончания изменения CG Hlin (рис. 3, панель 2 ), разность ∆ t p = t 2 – t p между временами окончания изменения CG Hlin и достижения пика скорости изменения CG H (рис. 3, панель 3 ).
H -синергия
∆ t Hb , мс
100 г
70 I
30 I
∆ t Hf , мс
∆ t р , мс
Err , %
9r
6 I 3L
200 r
∆ tcross , мс
–200 1
400 г
200 I
0I

300 r
150 [
0I


а б в а б в
ОС2 ОС3
а б в ОС1
Рис. 3. Усредненные по всем испытуемым (среднее± SD ) временные характеристики ∆ t Hb (1), ∆ t Hf (2), ∆ t р (3), ∆ t cross (5) сигналов прямого управления CG Heq и CG А 0, а также среднеквадратичная ошибка Err (4) аппроксимации CG Heq линейной функцией CG Hlin в процентах от амплитуды изменения CGH eq . ОС1 – модель (8), ОС2 – модель (10), ОС3 – модель (11). Варианты а , б и в соответствуют трем методам расчета параметров петли обратной связи: а – решение обратной задачи динамики, б и в – решение прямой задачи динамики с минимизацией ошибки соответственно по скорости и положению центра тяжести CGH
В среднем по всем испытуемым длительность движения по Н-синергии составила ∆tH = tHf – tHb = 622±80 мс. Как правило, начало движения tHb запаздывает по сравнению с началом t1 изменения CGHlin. Задержка ∆tHb = tHb – t1 для всех моделей ОС и методов расчета параметров ОС в среднем по всем испытуемым, моделям и методам оказалась небольшой ∆tHb = 54±51 мс, однако достоверно большей нуля (Т – тест, р < 0,001). Таким образом, начало изменения CGHlin почти совпадает с началом изменения CGH, что свидетельствует о том, что принятая линейная аппроксимация CGHlin хорошо улавливает начало изменения управляющего сигнала CGHeq и вызванное им начало движения. Остановка движения tHf тоже запаздывает по сравнению с окончанием t2 линейного аппроксимирующего отрезка. Это запаздывание также статистически достоверно (Т – тест, р < 0,001). В среднем по всем испытуемым, моделям и методам задержка составила ∆tHf = 165±178 мс. Отметим, что задержка ∆tHf значительно превосходит задержку ∆tHb, что согласуется с теорией РТ. Согласно данной теории задержка ∆tHb мала, так как связана только с инерцией биомеханической системы, приводящей к запаздыванию наблюдаемого перемещения тела по сравнению с началом изменения мышечных усилий. Напомним, что мышечные усилия возникают по причине рассогласования между начальной конфигурацией тела и его равновесной конфигурацией, изменяющейся в результате центральной команды. Задержка же ∆tHf велика, так как изменение CGHeq необходимо только для разгона движения, а торможение его происходит пассивно за счет «пружиноподобных» вязко-эластичных сил. Поэтому в теории РТ предполагается, что момент t2 окончания изменения CGHeq близок к моменту окончания разгона движения, т.е. к моменту tp достижения пика его скорости [9]. В наших экспериментах момент t2, как правило, был задержан относительно tp. В среднем по всем испытуемым, моделям и методам задержка составила ∆tр = 149±172 мс, т.е. 24% от полной длительности ∆tН движения по Н-синергии. Величина задержки ∆tр определяется соотношением между инерционными, вязкими и эластичными силами, и ее наличие не противоречит теории РТ.
Как видно из рис. 3 (панели 1 – 3 ), результаты, полученные методом решения прямой задачи динамики (варианты б и в ), в большинстве случаев близки для всех трех моделей ОС, в то время как результаты, полученные методом решения обратной задачи динамики (вариант а ), в среднем заметно отличаются от полученных методом решения прямой задачи. Поскольку ошибка аппроксимации управляющего сигнала CG Heq с помощью CG Hlin меньше при использовании метода решения прямой задачи, чем обратной, рис. 3 (панель 4 ), то в рамках теории РТ метод решения прямой задачи является предпочтительным.
Тем не менее относительно небольшие значения ошибки свидетельствуют о том, что все рассмотренные модели и методы допускают хорошую аппроксимацию прямого управляющего сигнала CG Heq с помощью простой линейной зависимости от времени CG Hlin , как это постулируется в теории РТ [9].
Сигнал прямого управления в А-синергии
Полное перемещение центра тяжести ∆ CG является суммой перемещений ∆ CG Н и ∆ CG А , связанных с движениями по Н - и А -синергиям. Перемещение ∆ CG А направлено вперед, «компенсируя» перемещение ∆ CG Н назад. В среднем по всем испытуемым ∆ CG А = 4,9±0,5 см, а ∆ CG Н = –3,9±1,0 см. Как и для Н -синергии, начало и окончание движения по А -синергии рассчитывались по пятипроцентному порогу от максимальной скорости перемещения центра тяжести в этой синергии. Для испытуемого, представленного на рис. 2, начало движения по Н -синергии опережало начало движения по А -синергии на 220 мс (рис. 2, в ). В среднем по всем испытуемым задержка начала движения по А -синергии относительно начала движения по Н -синергии составила t Аb – t Hb = 154±41 мс. Данный результат отличается от полученного авторами ранее в работе [5], где наблюдалось более раннее (в среднем на 70 мс) начало движения по А -синергии, чем по Н -синергии. Кроме того, в настоящей работе длительности движений по Н - и по А -синергиям оказались сравнимыми (в среднем по всем испытуемым: t Аf – t Ab = 636±200 мс и, как было приведено выше, t Нf – t Нb = 622±80 мс), в то время как в работе [5] длительность движения по А -синергии была значимо больше, чем по Н -синергии (820 мс по сравнению с 510 мс). Указанные отличия могут быть связаны с разными экспериментальными условиями. Во-первых, в работе [5] колени испытуемых не блокировались, а во-вторых, движения на неподвижной опоре не перемежались с движениями с возмущениями. Возможная адаптация к неожиданным возмущениям заключалась в задержке движения по А -синергии. Возможность такой избирательной адаптации движения по А -синергии служит еще одним дополнительным аргументом в пользу гипотезы авторов о независимом управлении А - и Н -синергий, высказанной в [2, 5, 6].
Как и для случая Н -синергии, параметры петли ОС, необходимые для расчета сигнала прямого управления ξ А 0 по уравнениям (12)–(14), для каждого из пяти испытуемых рассчитывались индивидуально. Использованные параметры были получены с помощью решения обратной задачи динамики и с помощью решения прямой задачи динамики с оптимизацией параметров петли ОС по скорости перемещения CG или по положению CG . Их значения, усредненные по всем испытуемым, приведены в работе [3].
На рис. 2, б жирной сплошной линией представлена типичная зависимость ξ А 0( t ) сигнала ПУ от времени, рассчитанная для одного из испытуемых методом решения обратной задачи динамики по модели ОС1. В отличие от случая Н -синергии коэффициент жесткости K АS в петле ОС по А -синергии оказался близок к единице (в среднем по испытуемым, моделям и методам K АS = 0,95±0,02). Таким образом, уравнение (9) для А -синергии неприменимо и любая конечная конфигурация тела, не приводящая к потере равновесия за счет выхода горизонтальной проекции CG за границы опоры, является приемлемой. Поэтому сигнал ПУ для А -синергии показан на графике не в терминах равновесного положения СG , как для Н -синергии, а в виде зависимости CG А 0 = b А ξ А 0.
Как показано на рис. 2, б , ход кривой для управляющего сигнала CG А 0 имеет две фазы, соответствующие разгону и торможению движения в данной синергии. В отличие от Н -синергии, в которой торможение движения обеспечивается «пассивными» вязко-эластичными силами, в А -синергии жесткости петли управления по ОС достаточно только для компенсации гравитационных сил. Поэтому торможение движения в данной синергии, как и разгон, происходит «активно», т.е. за счет прямого управления мышечными силами. Аналогично случаю Н -синергии (рис. 2, а ), начало движения t Аb запаздывает по сравнению с началом изменения сигнала прямого управления CG А 0 (рис. 2, б ). Как и для Н -синергии, эта задержка мала, так как связана только с инерцией биомеханической системы, приводящей к запаздыванию наблюдаемого перемещения по сравнению с началом изменения мышечных усилий. Окончанием фазы разгона и началом фазы торможения авторы полагали момент t cross перехода сигнала прямого управления CG А 0 через нуль (рис. 2, б ).
На рис. 3 (панель 5 ) представлены значения задержки окончания t cross фазы разгона по А -синергии относительно окончания t 2 изменения управляющего сигнала по Н -синергии ∆ t cross = t cross – t 2 для всех моделей ОС и методов расчета их параметров. В среднем по всем испытуемым, моделям и методам эта величина составила ∆ t cross = –48±175 мс и отличалась от нуля недостоверно (Т – тест, р = 0,07). Таким образом, окончание фазы разгона t cross движения по А -синергии фактически совпадает с окончанием фазы разгона t 2 движения по Н -синергии. При этом фаза разгона по Н- синергии полностью определяет конечную равновесную конфигурацию тела, а остановка движения в конечной конфигурации осуществляется «вязко-эластичными силами» петли ОС без участия активного ПУ. В отличие от этого, в А- синергии остановка движения осуществляется с помощью активного ПУ уже после завершения ПУ по Н -синергии.
Обсуждение результатов
Значения параметров петли обратной связи (ОС) при управлении движением тела стоящего человека в сагиттальной плоскости, рассчитанные в предыдущей работе авторов [3], были использованы в настоящем исследовании для анализа временного хода сигнала прямого управления (ПУ) при выполнении целенаправленного наклона корпуса вперед. Анализ проводился в рамках разработанного авторами ранее подхода к описанию движения в терминах «естественных синергий», или «собственных синергий» [4]. Последние определяются как движения вдоль собственных векторов уравнения движения для биомеханической модели тела человека в поле силы тяжести. Уникальным свойством естественных синергий является то, что в них сочетается простая линейная связь как между изменениями суставных углов (кинематическая синергия), так и между изменениями суставных моментов (динамическая синергия). В настоящей работе движения в коленных суставах блокировались и, таким образом, использовалась модель тела с двумя суставами – голеностопным и тазобедренным. В этом случае существуют две естественные синергии. По доминирующему суставу, дающему максимальный вклад в динамику и кинематику каждой из них, они были названы «Н-синергией» (Hip – тазобедренный сустав) и «А-синергией» (Ankle – голеностопный сустав). Ранее авторами было показано, что естественные синергии независимо друг от друга управляются как напрямую [1, 5], так и по обратной связи [2, 3, 6].
В физиологии движений существуют две точки зрения на организацию двигательного управления в живых системах. Согласно одной из них эта организация основана на управлении равновесным положением (равновесной конфигурацией) биомеханической системы. Согласно второй – она основана на непосредственном прямом управлении силами мышц.
Первая точка зрения наиболее последовательно представлена в теории равновесной точки (РТ) [9]. Согласно этой теории при выполнении движения планируется только равновесная конфигурация тела, в то время как переход из начальной конфигурации в конечную осуществляется за счет «пассивных вязкоэластичных сил», определяемых петлей ОС по рассогласованию между действительной и планируемой конфигурациями тела. Преимуществами такого подхода являются, во-первых, то, что движение планируется в терминах статики, а его динамика обеспечивается «автоматически» по петле ОС, и, во-вторых, то, что конечная конфигурация достигается и при неожиданных возмущениях во время выполнения движения.
Согласно второй точке зрения, представленной, например, в работе [12], движение планируется в терминах изменения мышечных сил, обеспечивающих желаемую траекторию и скорость движения вдоль этой траектории. При этом непосредственное управление мышечными силами осуществляется путем решения обратной задачи динамики с помощью внутренней нейронной модели (ВНМ) [16, 23], учитывающей схему тела и инерционные характеристики его звеньев. Преимуществом данного подхода является возможность планирования не только простого перемещения из начального положения в конечное, как постулируется в теории РТ, а любого сколь угодно сложного движения. Недостатком двигательного управления, основанного на таком принципе, является невозможность достижения желаемой конечной конфигурации без коррекции сигнала ПУ в том случае, если во время двигательного акта происходят неожиданные внешние возмущения. Это объясняется преуменьшением роли обратной связи в рамках данного подхода.
Как показано выше в разделе «Модель и методы», в принятом авторами линейном приближении для модели петли ОС на биомеханическом уровне обе точки зрения на организацию двигательного управления формально приводят к одинаковым выражениям для управляющих сил (суммарных силовых моментов в суставах). Поэтому вопрос о предпочтении первой или второй точки зрения сводится к оценке того, достаточно ли велики «вязко-эластичные силы» (коэффициенты жесткости и вязкости в петле ОС), чтобы обеспечить наблюдаемое движение при простом законе изменения сигнала прямого управления [13]. Например, в теории РТ постулируется, что сигнал ПУ изменяет равновесную конфигурацию тела с постоянной скоростью вдоль прямой траектории, соединяющей начальную и желаемую конечную конфигурации тела [9]. Когда «вязко-эластичные силы» достаточны для выполнения движения с таким «простым» сигналом ПУ, можно принять, что для рассматриваемого движения осуществляется «статическое» ПУ согласно теории РТ («управление по положению»). Если же «вязко-эластичные силы» недостаточны и требуется непосредственное управление силами мышц, то можно принять, что осуществляется «динамическое» ПУ согласно теории ВНМ («управление по движению») [13].
Результаты настоящего исследования показывают, что при выполнении наклона корпуса в сагиттальной плоскости у человека наблюдаются оба типа организации двигательного управления. Как отмечалось выше, данное движение является суперпозицией двух независимых «естественных синергий». При этом управление по Н -синергии организовано по первому типу (хорошо согласуется с теорией РТ), а управление по А -синергии – по второму типу (согласуется с теорией ВНМ). Коэффициенты жесткости и вязкости петли ОС для Н -синергии оказались достаточно велики, чтобы выполнить движение по этой синергии при «простом» линейном характере изменения сигнала прямого управления (см. рис. 2, а , тонкая сплошная линия). Отметим, что жесткость в петле ОС для Н -синергии возрастает во время выполнения движения по сравнению со случаем неподвижного вертикального стояния [3]. В отличие от этого, коэффициент жесткости в петле ОС для А -синергии во время движения оказался меньше, чем при неподвижном стоянии [3]. При этом во время движения коэффициент жесткости К AS близок к единице, т.е. достаточен лишь для уравновешивания гравитационных сил. В этом случае любая конечная конфигурация тела в А -синергии, при которой проекция центра тяжести остается в пределах площади опоры, является нейтрально устойчивой. Если во время выполнения наклона корпуса происходит неожиданное кратковременное возмущение движения, то желаемая конечная конфигурация тела в Н -синергии все-таки достигается, несмотря на возмущение, в то время как в А -синергии возмущение изменяет конечную конфигурацию тела [3].
В случае наклона корпуса Н -синергия обеспечивает целевую компоненту движения – наклон на заданный инструкцией угол, а А -синергия обеспечивает вспомогательную постуральную компоненту движения, которая компенсирует смещение центра тяжести по целевой компоненте [5, 18]. Поскольку инструкция задавала амплитуду наклона корпуса , почти полностью определяемую движением по Н -синергии, то управление по этой синергии происходит «по положению» (в соответствии с теорией РТ), что согласуется с наблюдаемым во время движения увеличением жесткости K HS . Конечное же положение центра тяжести явно инструкцией не задается (очевидно, что его проекция для сохранения равновесия должна лишь оставаться в пределах площади опоры), поэтому оно и не является объектом точного контроля со стороны ЦНС. При неподвижном стоянии поведенческой задачей, очевидно, является поддержание заданной конфигурации тела как по Н -, так и по А -синергиям, и поэтому двигательный контроль в этом случае организован «по положению» по обеим естественным синергиям. Соответственно, коэффициент жесткости по А -синергии при неподвижном стоянии ( K AS ≈ 1,0–1,15, [2, 3, 6]) оказался больше, чем при выполнении наклона корпуса ( K AS = 0,95, [3]), обеспечивая более устойчивый, чем при движении , контроль заданного неподвижного положения и по А -синергии [6].
Ранее особенности организации управления движением при наклоне корпуса человека исследовались в рамках теории РТ в работе [7]. Было показано, что паттерн изменения равновесного угла в тазобедренном суставе в зависимости от времени имеет немонотонную N -образную форму. Такой характер изменения равновесного угла отличается от полученного в данной работе для Н -синергии, изменение которого оказалось монотонным в согласии с более принятым представлением в теории РТ.
Данное расхождение, по-видимому, объясняется тем, что в работе [7] исследование проводилось в терминах контроля силового момента в тазобедренном суставе в зависимости от угла в этом суставе. В то же время, как показано в работах авторов [2– 6], при выполнении наклона контролируются не отдельные суставы, а «естественные синергии», в каждую из которых дают вклад все суставные углы. Более того, в настоящей работе показано, что только движение по Н -синергии можно трактовать в рамках теории РТ, в то время как движение по А -синергии не согласуется с этой теорией.
Отмеченные особенности организации двигательного управления по Н - и А -синергиям наблюдались для всех трех рассмотренных моделей петли ОС и не зависели от метода расчета их параметров.
Результаты настоящего исследования показывают, что обе упомянутые выше точки зрения на организацию управления движениями в живых системах (либо «по положению», либо «по движению») не столько противоречат, сколько дополняют друг друга. Выбор способа управления зависит от поведенческой задачи. Более того, в одном двигательном акте, примером которого является рассмотренный авторами наклон корпуса в сагиттальной плоскости у человека, оба способа управления могут наблюдаться одновременно.
Благодарности
Авторы выражают глубокую благодарность профессору Ж. Масьону за помощь в проведении эксперимента и обсуждении результатов.
Настоящее исследование поддерживалось грантами РФФИ 10-04-00191-а, РГНФ 09-06-00883-а, а также программой РАН «Фундаментальные науки – медицине».
Список литературы Организация прямого двигательного управления при наклонах корпуса человека
- Александров А.В., Фролов А.А., Масьон Ж. Стратегия поддержания равновесия при наклоне корпуса на узкой опоре у человека//Российский журнал биомеханики. -2002. -Т. 6, № 4. -С. 63-78.
- Александров А.В., Фролов А.А., Хорак Ф.Б., Карлсон-Кухта П., Парк С. Биомеханический анализ стратегий поддержания равновесия при вертикальном стоянии человека//Российский журнал биомеханики. -2004. -Т. 8, № 3. -С. 30-47.
- Александров А.В., Фролов А.А. Параметры петли обратной связи двигательного управления при наклонах корпуса человека//Российский журнал биомеханики. -2009. -Т. 13, №2. -С. 49-68.
- Alexandrov A.V., Frolov A.A., Massion J. Biomechanical analysis of movement strategies in human forward trunk bending. I. Modeling//Biological Cybernetics. -2001. -Vol. 84. -P. 425-434.
- Alexandrov A.V., Frolov A.A., Massion J. Biomechanical analysis of movement strategies in human forward trunk bending. II. Experimental study//Biological Cybernetics. -2001. -Vol. 84. -P. 435-443.
- Alexandrov A.V., Frolov A.A., Horak F.B., Carlson-Kuhta P., Park S. Feedback equilibrium control during human standing//Biological Cybernetics. -2005. -Vol. 93. -P. 309-322.
- Domen K., Latash M.L., Zatsiorsky V.M. Reconstruction of equilibrium trajectories during whole-body movements//Biological Cybernetics. -1999. -Vol. 80. -P. 195-204.
- Barin K. Evaluation of a generalized model of human postural dynamics and control in the sagittal plane//Biological Cybernetics. -1989. -Vol. 61. -P. 37-50.
- Feldman A.G., Levin M.F. The origin and use of postural frames of reference in motor control//Behavioral Brain Science. -1995. -Vol. 18. -P. 723-806.
- Ferrigno G., Pedotti A. ELITE: a digital dedicated hardware system for movement analysis via real time TV signal processing//IEEE Transactions on Biomedical Engineering. -1985. -Vol. 32. -P. 943-950.
- Frolov A.A., Prokopenko R.A., Dufosse M., Ouezdou F.B. Adjustment of the human arm viscoelastic properties to the direction of reaching//Biological Cybernetics. -2006. -Vol. 94. -P. 97-109.
- Gandolfo F., Mussa-Ivaldi F.A., Bizzi E. Motor learning by field approximation//Proceedings of the National Academy of Sciences of the United States of America. -1996. -Vol. 93. -P. 3843-3846.
- Gomi H., Kawato M. Equilibrium-point control hypothesis examined by measuring arm stiffness during multijoint movement//Science. -1996. -Vol. 272. -P. 117-120.
- Gribble P.L., Ostry D.J., Sanguineti V., Laboissiere R. Are complex control signals required for human arm movement?//Journal of Neurophysiology. -1998. -Vol. 79. -P. 1409-1424.
- Gurfinkel V.S., Ivanenko Yu.P., Levik Iu.S., Babakova I.A. Kinesthetic reference for human orthograde posture//Neuroscience. -1995. -Vol. 68. -P. 229-243.
- Haruno M., Wolpert D.M., Kawato M. Mosaic model for sensorimotor learning and control//Neural Computations. -2001. -Vol. 13. -P. 2201-2220.
- Kuo A.F. An optimal control model for analyzing human postural balance//IEEE Transactions on Biomedical Engineering. -1995. -Vol. 42. -P. 87-101.
- Massion J., Alexandrov A.V., Frolov A.A. Why and how are posture and movement coordinated? Brain Mechanisms for the Integration of Posture and Movement/ed. S. Mori, D.G. Stuart, M. Wiesendanger//Progress in Brain Research. -2004. -Vol. 143. -P. 13-27.
- Park S., Horak F.B., Kuo A.D. Postural feedback responses scale with biomechanical constraints in human standing//Experimental Brain Research. -2004. -Vol. 154. -P. 417-427.
- Peterka R.J. Sensorimotor integration in human postural control//Journal of Neurophysiology. -2002. -Vol. 85. -P. 1097-1118.
- Welch T.D., Ting L.H. A feedback model reproduces muscle activity during human postural responses to support-surface translations//Journal of Neurophysiology. -2008. -Vol. 99. -P. 1032-1038.
- Winter D.A. Biomechanics and motor control in human movement. -New York: John Wiley and Sons, 1990. -227 p.
- Wolpert D.M., Kawato M. Multiple paired forward and inverse models for motor control//Neural Networks. -1998. -Vol. 11. -P. 1317-1329.
