Основные принципы функционирования автономного рулевого привода многоосного транспортного средства особо большой грузоподъемности

Автор: Козлова А.С.
Журнал: Международный журнал гуманитарных и естественных наук @intjournal
Рубрика: Технические науки
Статья в выпуске: 12-1 (87), 2023 года.
Бесплатный доступ
В представленной статье рассматривается основные принципы функционирования рулевого привода транспортного средства особо большой грузоподъемности. На основе функциональной схемы рулевого привода транспортного средства особо большой грузоподъемности была построена математическая модель, позволяющая моделировать различные режимы работы привода.
Транспортное средство, автономный рулевой привод, электрогидравлический рулевой привод, математическая модель, рулевое управление
Короткий адрес: https://sciup.org/170201497
IDR: 170201497 | DOI: 10.24412/2500-1000-2023-12-1-32-36
The basic principles of functioning of the autonomous steering drive of a multi-axle vehicle with a particularly high load capacity
The presented article discusses the basic principles of operation of the steering drive of a particularly heavy-duty vehicle. Based on the functional scheme of the steering drive of a particularly heavy-duty vehicle, a mathematical model was built that allows simulating various modes of operation of the drive.
Текст научной статьи Основные принципы функционирования автономного рулевого привода многоосного транспортного средства особо большой грузоподъемности
Многоосные транспортные средства особо большой грузоподъемности (далее МТС ОБГ) используются для транспортировки к месту назначения модулей цехов, морских доков, буровых установок, трансформаторов, атомных реакторов и других крупногабаритных неделимых изделий. При этом необходимо обеспечить маневренность МТС ОБГ при подъезде к разгрузочно-погрузочным площадкам. Поэтому в конструкции таких транспортных средств целесообразно использовать всеколесное рулевое управление (далее ВРУ), которое существенно повышает маневренные свойства машин и расширяет диапазон их использования.
ВРУ позволяет осуществлять поворот автомобиля и мобильного восемью способами: относительно каждой из осей и плоскопараллельное («крабовое») движение (Рис. 1) [1].
Рис. 1. Кинематические схемы способов поворота относительно осей
Применение автономного электрогид-равлического привода (далее АЭГРП) в системе ВРУ обеспечивает ряд преиму- ществ, по сравнению с приводом с централизованным источником гидравлического питания, а именно: возможность примене- ния объёмного регулирования, и как следствие увеличение КПД, обеспечение большей надежности, так как при выходе из строя одного из приводов, установленных на МТС ОБГ, вся система будет рабо- тать в штатом режиме; удобство монтажа и обслуживания, т.к. привод колеса представляет собой отдельный модуль [2, 3].
Функциональная схема АЭГРП представлена на рисунке 2 [4].
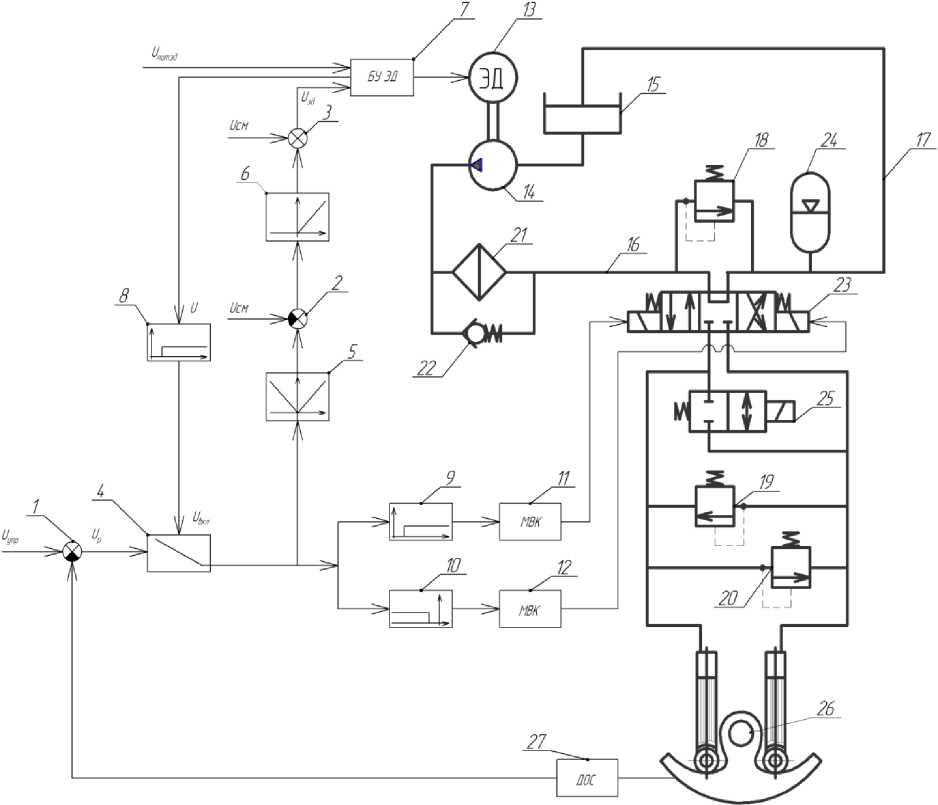
Рис. 2. Функциональная схема автономного электрогидравлического привода
В нее входят сумматоры 1, 2 и 3, реле включения цепи управления 4, двухполу-периодный выпрямитель 5, однополупери-одный выпрямитель 6, блок управления электродвигателем 7, компараторы 8, 9 и 10, мощные выходные каскады 11 и 12, электродвигатель постоянного тока 13, выходной вал которого соединен с ротором нерегулируемого нереверсивного насоса 14, гидравлический бак 15, напорную гидравлическую магистраль 16, сливную гидравлическую магистраль 17, предохранительные клапаны 18, 19, 20 гидравлический фильтр 21, обратный клапан 22, четырехлинейный трехпозицион- ный электрогидравлический распределитель с пружинным центрированием 23, гидравлический компенсатор 24 клапан кольцевания 25, эвольвентный исполнительный механизм 26, датчик обратной связи 27.
При подаче питания на блок управления электродвигателем 7 вал электродвигателя 13 и ротор насоса 14 начинают вращаться, и при достижении заданной величины оборотов двигателя 13 на выходе компаратора 8 возникает сигнал, замыкающий контакты реле 4. В результате управляющий сигнал рассогласования через сумматор 1 поступает на входы двухполупери- одного выпрямителя 5 и компараторов 9 или 10 [5].
В зависимости от знака управляющего сигнала на выходе одного из компараторов 9 или 10 формируется команда, которая через мощный выходной каскад 11 или 12 поступает на одну из обмоток электрогид-равлического распределителя с пружинным центрированием 23, золотник которого перемещается в одно из крайних положений.
Рабочая жидкость с выхода насоса 14 по напорной гидравлической магистрали 16 через гидравлический фильтр 21 поступает в рабочую полость одного из гидравлических цилиндров исполнительного механизма 26, шток которого начинает выдвигаться. Одновременно, шток второго гидроцилиндра начинает втягиваться, вытесняя рабочую жидкость в сливную гидравлическую магистраль 17, которая, затем, поступает в гидравлический бак 15. Выходной вал исполнительного эвольвентно-го механизма 26 совершает угловое перемещение, датчик обратной связи 27 измеряет это перемещение и формирует сигнал обратной связи [4].
Особенностью данной схемы является то, что в пусковом режиме в схеме АЭГРП реле 4 исключает работу АЭГРП до момента разгона электродвигателя 13 до минимальных оборотов, гарантирующих надежную работу электродвигателя 13 и насоса 14. Кроме того в схеме АЭГРП обеспечивается поддержание этих оборотов при работе в нулевом положении, при котором напорная гидравлическая магистраль 16 соединена со сливной гидравлической магистралью 17. Такое техническое решение обеспечивает надежную работу АЭГРП и минимальные энергетические потери.
Для моделирования функциональной схемы АЭГРП была использована система Lazarus – открытая среда разработки программного обеспечения (ПО) на языке
ObjectPascal для компилятора FreePascal. Математическая модель, была строена на уравнениях, описывающих процессы, происходящие в механических, гидравлических и комбинированных системах из состава АЭГРП. Она учитывает соотношение объемов нерастворенного воздуха и жидкости, диаметр и длину трубопроводов, местные потери, потери напора в трубах, потери на золотнике, упругость шины.
Благодаря разработанной математической модели, возможно, моделировать различные рабочие режимы. Например, разные режимы эксплуатации колеса, работу АЭГРП в зависимости от типа насоса, работу АЭГРП с различными параметрами трубопроводов, влияние содержание воздуха в системе на работу АЭГРП.
На рисунке 3 представлены замкнутые логарифмические амплитуднофазочастотные характеристики системы, которые содержат информацию о величинах запаздывания поворота колеса относительно управляющей команды и точности отработки входного сигнала на различных частотах с учетом величин моментов трения в пятне контакта колеса с опорной поверхностью.
Так, например, на частоте 0,5 ГЦ при моменте трения в пятне контакта колеса с опорной поверхностью 2000 нМ величина запаздывания поворота колеса относительно управляющей команды составляет 73 мс, при 4000 нМ – 102 мс, при 7500 Нм – 172 мс; искажения амплитуды поворота колеса относительно управляющей команды при моменте трения в пятне контакта колеса с опорной поверхностью 2000 нМ нет, для 4000 нМ искажение амплитуды составляет 30%, при 7500 Нм – 50%. Таким образом, установлены закономерностей функционирования и основные принципы построения АЭГРП системы рулевого управления многоосных транспортных средств особо большой грузоподъёмности.
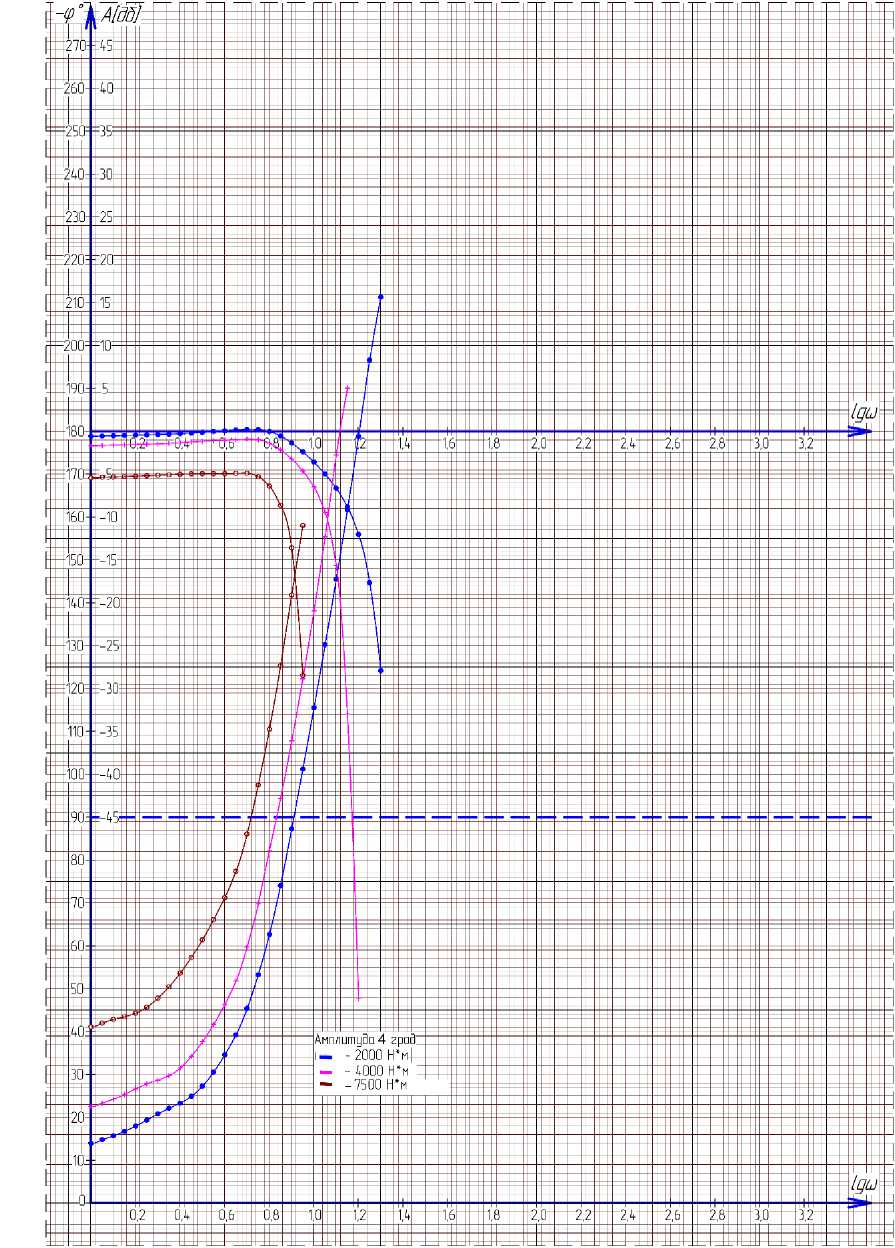
Рис. 3. Замкнутые ЛАФЧХ системы при различных нагрузках в пятне контакта колеса
Разработана функциональная схема АЭГРП, в состав которой входят недорогие надежные гидравлические устройства, не усложняющие конструкцию системы рулевого управления, с относительно простой системой управления.
Разработана математическая модель АЭГРП позволяет моделировать различные режимы работы АЭГРП с учетом изменения параметров внешней среды и конструкции АЭГРП.
Список литературы Основные принципы функционирования автономного рулевого привода многоосного транспортного средства особо большой грузоподъемности
- Белоусов Б.Н., Попов С.Д. Колесные транспортные средства особо большой грузоподъемности. Конструкция. Теория. Расчет. Под общей ред. Б.Н. Белоусова. - М.: Изд-во МГТУ им. Н.Э. Баумана, 2006. - 728 с.
- Белоусов Б.Н., Климачкова А.С. Проектирование и моделирование привода рулевого управления как ключевого элемента мехатpонного опоpно-ходового модуля // Мехатроника автоматизация управление. - 2015. - Т. 16, №7. - С. 484-491. EDN: UBKQWF
- Белоусов Б.Н., Климачкова А.С. Тpанспоpтная мехатpоника - будущее автомобиля // Мехатроника автоматизация управление. - 2015. - Т. 16, №1. - С. 38-43. EDN: TGGUKN
- Автономный электрогидравлический следящий привод: патент № 2529965 РФ / Б.Н. Белоусов, С.В. Наумов, А.С. Климачкова; заявл.17.04.2013; опубл. 11.08.2014. Бюлл. №28.
- Автономный электрогидравлический рулевой привод: патент №2378539 РФ / С.В. Наумов [и др.]; заявл.26.08.2008; опубл.10.02.2009. Бюлл. №4.
- Белоусов Б.Н., Попов С.Д. Колесные транспортные средства особо большой грузоподъемности. Конструкция. Теория. Расчет. Под общей ред. Б.Н. Белоусова. - М.: Изд-во МГТУ им. Н.Э. Баумана, 2006. - 728 с.
- Основы проектирования следящих систем // Под ред. Н.А. Лакоты. - M.: Машиностроение, 1978. - 391 с.
