Особенности динамики замкнутых электромехатронных преобразователей с шаговыми электродвигателями

Автор: Смирнов Юрий Сергеевич, Соколов Александр Васильевич
Статья в выпуске: 3 (262), 2012 года.
Бесплатный доступ
Представлен анализ устойчивости замкнутых электромехатронных преобразователей (ЭМТП) с шаговыми электродвигателями (ШЭД). Рассмотрены два варианта определения условий устойчивости нелинейной импульсной системы. Получена импульсная передаточная функция ЭМТП с учетом запаздывания в системе. Построение переходного процесса при детерминированных входных воздействиях в системе произведено численным методом по рекуррентной формуле.
Устойчивость, нелинейная импульсная система, импульсная передаточная функция, рекуррентная формула, передаточный механизм
Короткий адрес: https://sciup.org/147154831
IDR: 147154831 | УДК: 621.313.13-133.3:62-83
Features of dynamics closed electro-mechatronic converters with electric step motors
The analysis of stability closed electro-mechatronic converters with electric step motors is presented. Two variants of definition of stability conditions of nonlinear pulse system are considered. Pulse transfer function electro-mechatronic converters taking into account delay in system is received. Transient construction at the determined entrance influences in system is made by a numerical method under the recurrent formula.
Текст научной статьи Особенности динамики замкнутых электромехатронных преобразователей с шаговыми электродвигателями
Анализ устойчивости
Общим для работы замкнутого и разомкнутого ЭМТП с ШЭД является то, что независимо от амплитуды входного импульса ШЭД отрабатывает единичное шаговое перемещение, что эквивалентно наличию в структурной схеме порогового элемента, обладающего релейной характеристикой. Логическая часть электронного коммутатора (ЭК) осуществляет импульсную фазовую модуляцию, преобразуя одноканальную последовательность импульсов малой мощности в многофазную систему напряжений, прикладываемых к обмоткам управления ШЭД.1 Ступенчатому характеру напряжений на обмотках ШЭД соответствует дискретное вращение электромагнитного поля, вследствие чего движение ротора состоит из элементарных угловых перемещений, совершаемых по неко- торому закону. Электромехатронный преобразователь с ШЭД является системой с т+1 степенями свободы: т – электрические и одна механическая.
Эквивалентная структурная схема замкнутого ЭМТП с ШЭД представлена на рис. 1.2
Передаточная функция W л ( p ) в ЭМТП включает в себя передаточные функции интеллектуального силового модуля (ИСМ) и цифрового преобразователя перемещений (ЦПП), которые в первом приближении можно считать безинерционными и характеризовать коэффициентом передачи. В большинстве случаев влияние динамики циклического ЦПП можно учесть звеном чистого запаздывания. Динамические свойства ЦПП следящего типа рассмотрены в [1]. В зависимости от соотношения динамических показателей ШЭД и остальных звеньев ЭМТП, которые определяются построением
Смирнов Юрий Сергеевич – д-р техн. наук, профессор кафедры «Приборостроение», Южно-Уральский государственный университет; Тел: (351)2679012.

Рис. 1
ЭК и ЦПП, возможны два варианта определения условий устойчивости и возникновения периодических режимов в ЭМТП.
Первый вариант связан с применением в ЭМТП устройств, имеющих постоянные времени, значительно превышающие период управляющих импульсов ШЭД. Поэтому исследование устойчивости и условий возникновения периодических режимов может производиться путем перехода к эквивалентной релейной САУ без временного квантования. Это позволяет для анализа такой САУ воспользоваться известным методом гармонического баланса в его обычной форме.
В быстродействующих ЭМТП основным динамическим звеном является ШЭД. Анализ динамики такой САУ можно произвести на основе обобщенного метода гармонического баланса применительно к нелинейным импульсным системам.
Эквивалентная структурная схема ЭМТП для такого сочетания параметров представлена на рис. 2.
Импульсная переходная функция ЭМТП в данном случае будет переходной характеристикой ШЭД, которому соответствует переходная функция колебательного звена с запаздыванием, равным t зап, поскольку входные импульсы ЭК можно считать дельта-импульсами. Для получения D-преобразования решетчатой функции с запаздыванием воспользуемся теоремой сдвига [2].
Переходная функция колебательного звена h (t) = 1 - e"! t/T х
х
cos
.
Без учета запаздывания это и есть импульсная переходная функция приведенной непрерывной части ЭМТП:
to ( t ) = 1 - e ! tT
cos to t +
!
sin to t
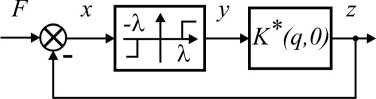
Рис. 2
где to =
71 -!
T
Введем новую независимую переменную -безразмерное время t = t/T y , тогда
Для анализа устойчивости определяем импульсную передаточную функцию разомкнутого ЭМТП, которая, как известно [2], представляет собой дискретное преобразование Лапласа импульсной переходной функции приведенной непрерывной части импульсной системы:
-! TJT to( t) = 1 - e y/
! cos to t +—^
sin to t , (6)
^
K * ( q , е ) = D { to ( n , е ) } = Z e" qn to ( n , e ) . (1)
n = 0
где to = to Ty.
Обозначим !Ty IT = n, тогда смещенная решетчатая функция to[n, е] = 1[n, е]-
Импульсную переходную функцию системы можно определить по известной передаточной функции, пользуясь теоремой разложения [2]:
- e "n n
! cos ton + —f=
sin ton .
5 Г ” - 1
»(t )=zz v=0ц=0
( r v -И- 1 ) !
d r -И- 1
dpr ” -ц- 1
Воспользуемся теоремами смещения и линейности и определим импульсную передаточную функцию комплекса без учета запаздывания:
t ц
W ( P )( P - P v ) ” 1 e p = pv Ц !
. Pvt
/
K * ( q , e ) =
e q e 2 q cos toe- e q e n cos to ( 1 -e )
^^^^^^^—^^^^^^^— ^^^— eq - 1
e 2 q - 2 eqe n cos to+ e 2 n
e "ne -
где W ( p ) = P ( p )/ [ pQ ( p ) ] .
Для случая, когда имеется один нулевой корень, С 0о = P (0)/ Q (0); C ” o = P ( p v )/ [ Q '( p v ) p v ] . (3) Вычисление коэффициентов С ” ц довольно трудоемко. Импульсная переходная функция ю( t ) и переходная функция звена h ( t ) связаны между собой соотношением ю( t ) = dh / dt .
e2q sin toe + eqe n sin to(1 -e)E „„
___________________________i_____L ! e "ne.(8)
e2q - 2eq e"n cos to+e-2n
Чтобы получить импульсную передаточную функцию с учетом запаздывания, воспользуемся теоремой сдвига [2]. Если £ < 0, то введем в рассмотрение решетчатую функцию вида to(n-1, 1+s), тогда согласно теореме
D { to [ n- 1,1 + е ] } = e"qF * ( q ,1 + е ) .
Особенности динамики замкнутых электромехатронных преобразователей с шаговыми электродвигателями
Выразим запаздывание через безразмерное время σ = tзап / Tу и воспользуемся теоремой запаздывания [2]. Импульсная передаточная функция ЭМТП (см. рис. 2) с учетом запаздывания будет иметь вид к * (q, e) =
e q e 2 q cos we - e q e n cos w ( 1 - e )
___________L e 'iE eq -1 e2q - 2eqe”n cos W+ e”2n
^^^^^M
^ e q sin w ( 1 -o ) + e n sin wo -n ( 1 -a )
1 - -^ 2 e 2 q - 2 eqe "n cos W+ e 2n
Учет влияния запаздывания важен при анализе устойчивости ЭМТП, она снижается с ростом запаздывания. Для анализа влияния запаздывания на устойчивость определяется импульсная передаточная функция замкнутого ЭМТП и по характе- ристическому полиному, с учетом критерия устойчивости Гурвица применительно к импульсным системам, определяется зависимость граничного коэффициента усиления системы как функция относительного запаздывания. По характеру эта зависимость является падающей, что указывает на ухудшение устойчивости системы с увеличением запаздывания [3].
Поскольку система является нелинейной, то необходимо определить условия отсутствия периодических режимов. Для этой цели используется метод Л.С. Гольдфарба, развитый в работах Я.З. Цыпкина и Ю.М. Коршунова применительно к нелинейным импульсным системам. Для получения условий отсутствия периодических режимов строятся их возможные границы. Упрощение анализа достигается использованием известного критерия абсолютной устойчивости САУ.
Построение переходного процесса
Для построения переходного процесса в системе удобно воспользоваться численным методом. В нелинейных непрерывных системах он обычно обеспечивает лишь приближенные решения, а для импульсных нелинейных систем во многих случаях дает точные решения. Для этого выводят рекуррентную формулу [3].
Преобразуем структуру ЭМТП к виду, показанному на рис. 3.
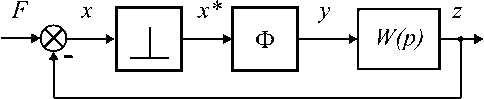
Рис. 3
Пользуясь обозначениями координат на нем, можно записать следующее уравнение:
^
F ( q ) - X ( q ) = K ‘( q ) £ Ф [ x ( n ) ] e " qn . (10) n = 0
Так как информация в D-преобразовании функции времени при ε = 0 содержится только в моменты времени t = nTy. то, следовательно, дан- ное уравнение содержит неизвестную величину ошибки при t = nTy, где Ту - период выборки информации, а n – номер управляющего импульса. Поскольку импульсная передаточная функция представляет собой D-преобразование импульсной переходной функции приведенной непрерывной части, ее можно разложить в ряд по степеням:
к * (q) = D {w[ n .0]} = g 0 + gie- q +
+ g 2 e " 2 q + ... , (11)
где g k – ординаты импульсной переходной функции при t = K .
Аналогично входную функцию, равную нулю при отрицательных значениях времени, также можно разложить в степенной ряд:
F ( q ) = F 0 + F 1 e - q + F 2 e “2 q + F3 e "3 q + (12)
Неизвестную функцию ошибки также представим степенным рядом:
X ( q ) = X 0 + X 1 e - q + X 2 e - 2 q + X 3 e"3q +. . . (13) где X k - величина ошибки при t = K .
При подстановке степенных рядов в исходное уравнение получим
[(F0 -X0) + (F -X1)e"q +(F2 -X2)-2q + .] =
= ( g 0 + g 1 e" q + g 2 e "2 q + . ) ( Ф [ X 0 ] +
+ Ф [ X 1 ] e" q + Ф [ X 2 ] e "2 q + . ) . (14)
Чтобы удовлетворялось это уравнение, коэффициенты при соответствующих степенях еq должны быть равны:
F 0 - x 0 = g 0 ф [ x 0 ] ;
F 1 - x 1 = g 0 ф [ x 1 ] + g 1 Ф [ x 0 ] ;
F 2 - x 2 = g 0 ф [ x 2 ] + g 1 Ф [ x 1 ] + g 2 ф [ x 0 ] ; (15)
F k - X k = ]£ g n Ф [ X k - n ] .
n = 0
Поскольку g 0 = 0, то, очевидно:
X 0 = F 0 ;
X 1 = F 1 - g 1 Ф [ X 0 ] ;
X 2 = F 2 - g 1 Ф [ X 1 ] - g 2 Ф [ X 0 ] ;
k
X k = F k - £ g n Ф [ X k _ „ ] , g 0 = 0.
n = 0
Поскольку коэффициенты gk сходятся к постоянному значению, придется брать большое число слагаемых для получения достаточно точного результата. Чтобы избежать этого, произведем вычитание двух последовательных ошибок. В этом случае получим следующий вид выражений, определяющих ошибки:
X 1 = X 0 - &ф[ X 0 ] + F - F 0 ;
X 2 _ X i + F - F 1 - g 1ф [ X i ] -( g 2 - g i ) Ф [ X 0 ] ;
X k + 1 _ X k + F k + 1 - F k - g 1 Ф [ X k ] -( g 2 - g i ) Ф X k - 1 .
Таким образом, переходный процесс в замкнутом ЭМТП при детерминированных входных воздействиях можно рассчитать по рекуррентной формуле [3]:
k
X k + 1 _ X k + F k + 1 - F k - E a n Ф [ X k - n ] . (18) n = 0
При ее выводе полагалось, что импульсная переходная функция в момент времени t = 0 имеет нулевое значение, а коэффициенты – a 0 = g 1 ; a 1 = g 2 – g 1 ; a k = g k +1 – g k . В этом случае коэффициенты а k при увеличении k будут стремиться к нулю. Коэффициенты g k можно либо вычислить путем деления числителя импульсной передаточной функции на ее знаменатель, либо взять ординаты импульсной переходной функции приведенной непрерывной части САУ в моменты времени t = kT у прихода управляющих импульсов на вход ЭМТП с ШЭД.
Построение переходного процесса в ЭМТП с ШЭД позволяет наглядно продемонстрировать основной недостаток пошагового управления, заключающийся в колебательном характере движения ротора и, соответственно, ИСМ. Находящиеся близко расчетные и экспериментальные значения параметров движения позволяют произвести оценку динамических показателей и ресурса ЭМТП с учетом оптимизации передаточного отношения ИСМ. Наименьшим ресурсом обладает ИСМ, имеющий износ поверхностей зацепления, т. е. редуктор.
Расчеты и экспериментальные исследования показали, что ЭМТП с ШЭД имеет области частот управления, при которых нагрузки на элементы ИСМ возрастают, что приводит к повышенному износу элементов редуктора. Кардинальным сред- ством устранения этого фактора является переход к минишаговому управлению. Наибольший эффект достигается при использовании минишагово-го управления в сочетании с самокоммутацией, что делает реальным создание безредукторного ЭМТП [4].
Это следует учитывать при проектировании ЭМТП с продолжительным сроком службы и переходить к безредукторным ЭМТП, которые за рубежом именуются Direct Drive (DD) [5], или Super Drive (SD).
При замыкании контура местной обратной связи (МОС) динамические свойства ЭМТП изменяются по сравнению с его динамическими свойствами при пошаговом управлении. Исполнительный электродвигатель при этом приобретает свойства вентильного электродвигателя (ВЭД), динамика которого требует отдельного рассмотрения.
Список литературы Особенности динамики замкнутых электромехатронных преобразователей с шаговыми электродвигателями
- Домрачев, В.Г. Схемотехника цифровых преобразователей перемещений: справ. пособие/B.Г. Домрачев, В.Р. Матвеевский, Ю. С. Смирнов. -М.: Энергоатомиздат, 1987. -392 с.
- Цыпкин Я.З. Теория линейных импульсных систем/Я.З. Цыпкин. -М.: Физматгиз, 1963. -968 с.
- Макаров, В.В. Некоторые вопросы анализа замкнутых систем автоматического управления с шаговыми электрическими двигателями/В.В. Макаров, Б.Л. Маринин, Ю. С. Смирнов//Электромеханические системы управления. -Л.: Наука, 1971. -C. 3-11.
- Smirnov, Y.S. Common Dateware of Robotics Mechatronic Converters Proc. of the Third ISMCR ’93/Y.S. Smirnov. -ITALY, Torino, 1993.
- Балковой, А.П. Прецизионный электропривод с вентильными двигателями/А.П. Балковой, В.К. Цаценкин. -М.: Издательский дом МЭИ, 2010. -328 с.
