Особенности исследования асимптотических свойств и успокоения некоторых систем с линейным запаздыванием

Автор: Б.Г. Гребенщиков, С.А. Загребина
Рубрика: Математическое моделирование
Статья в выпуске: 2 т.19, 2026 года.
Бесплатный доступ
В работе предложены методы получения достаточных условий асимптотической устойчивости и неустойчивости для систем дифференциальных уравнений, содержащих линейное запаздывание. Заменой аргумента такие системы сводятся к системам с постоянным запаздыванием, которые, однако содержат экспоненциальный множитель в правой части, то есть не являются липшицевыми. На основании этих условий исследуются некоторые системы линейных дифференциальных уравнений, при этом для одной из них предложен алгоритм стабилизации на бесконечном промежутке времени. Показано, что подобные достаточные условия справедливы и для сингулярно возмущенных систем с постоянным запаздыванием и с малым параметром при производной. На основании полученных условий асимптотической устойчивости предложен алгоритм стабилизации некоторых систем с линейным запаздыванием. Этот алгоритм может быть использован и при успокоении исследуемых сингулярных систем. получены достаточные условия асимптотической устойчивости для систем дифференциальных уравнений, содержащих линейное запаздывание. Системы подобного вида встречаются в задачах механики, физики, биологии, экономики, теории очередей. На основании полученных авторами условий устойчивости и неустойчивости исследуется асимптотическое поведение некоторых систем линейных дифференциальных уравнений, при этом для одной из них произведена стабилизация на бесконечном промежутке времени.
Неустойчивость, асимптотическая устойчивость, экспоненциальная оценка, первое приближение, стабилизация
Короткий адрес: https://sciup.org/147254148
IDR: 147254148 | УДК: 681.5.037 | DOI: 10.14529/mmp260201
Study Features of Asymptotic Properties and Calming of Some Systems with Linear Delay
This paper proposes methods for obtaining sufficient conditions for asymptotic stability and instability for systems of differential equations containing linear delay. By changing the argument, such systems are reduced to systems with constant delay, which, however, contain an exponential factor on the right-hand side, i.e., are not Lipschitz continuous. Based on these conditions, several systems of linear differential equations are studied, and for one of them, an algorithm for stabilization over an infinite time interval is proposed. It is shown that similar sufficient conditions are also valid for singularly perturbed systems with constant delay and a small parameter at the derivative. Based on the obtained asymptotic stability conditions, an algorithm for stabilizing certain systems with linear delay is proposed. This algorithm can also be used for calming the singular systems under study. Sufficient conditions for asymptotic stability are obtained for systems of differential equations containing linear delay. Systems of this type are encountered in problems in mechanics, physics, biology, economics, and queuing theory. Based on the stability and instability conditions obtained by the authors, the asymptotic behavior of certain systems of linear differential equations is studied, with one of them stabilized over an infinite time interval.
Текст научной статьи Особенности исследования асимптотических свойств и успокоения некоторых систем с линейным запаздыванием
В работе изучены асимптотические свойства некоторых систем дифференциальных уравнений с линейным запаздыванием, а также систем с постоянным запаздыванием, к которым приводятся эти системы заменой аргумента. Полученные таким образом системы с постоянным запаздыванием содержат экспоненциальный множитель в правой части, то есть не являются липшицевыми. Подобными свойствами обладают и некоторые системы с постоянными коэффициентами и с малым параметром при производной. Исследуемые системы с линейным запаздыванием имеют вид dx(t) dt
= Ax(t) + Bx(^t), ц = const, 0 < ц < 1, t > t 0 > 0.
Здесь A, B - постоянные матрицы размерности m x m, x(t) - m-мерная вектор-функция времени (аргумента) t, запаздывание имеет вид (1 - ^)t. Решение определено в начальный момент времени t o вектор-функцией ф(п) такой, что п G [pt o ,t o ].
Изучаемые системы с постоянным запаздыванием, к которым заменой аргумента т = ln ^—^ приводятся системы (1), имеют запаздывание а = — 1п(ц) и экспоненциальный множитель e τ
dz(T ) dτ
= t o e T [ Az ( t ) + Bz ( t — а)],
а> 0, т > 0, z(n) = Ф^ о е^ ), п G [ mWo ]-
Во многих случаях, исходя из таких систем, возможно получить достаточные условия как устойчивости, так и неустойчивости исходных систем. Системы с линейным запаздыванием встречаются в задачах механики, физики, биологии. Учет эффекта последействия важен для правильного качественного и количественного описания процессов, содержащих неограниченное запаздывание.
Отметим некоторые особенности полученной системы. Известно [1], что совокупность достаточных свойств ее асимптотической устойчивости имеет вид
Re (A) < —2в, в = const, в > 0, |p| <5, 6 = const, 0 < 6 < 1, где λ – собственные значения матрицы A, ρ – собственные значения матрицы A-1B. Но также данные условия асимптотической устойчивости справедливы и для стационарной сингулярной системы с постоянным запаздыванием и с малым параметром при производной, имеющий вид [1]
e—T^- = Azs (т ) + Bz£(r — a).
dτ
Приведем конкретный пример. Сравним решение х(т) системы dx(T) = exp т [А2х(т ) + B2 х(т — 1)], т > то = 1, 9,(5)
dτ с решением у (т) сингулярной системы также второго порядка
0,15-y^ = А2у(т) + В2у(т — 1), т > то = 1, 9.(6)
dτ
Здесь A 2 и B 2 - постоянные матрицы размерности 2 х 2, имеющие вид
А - ( —1 0,4 А в - ( 0,2 0,2 A
A2 = 0, 7 —1 J , B2 = 0,10, 3
x(t) и y(t) - вектор-функции второго порядка, определенные в момент времени t o одной и той же вектор функцией р(п) = { 1; 1 } ( * ) ,П ^ [0,9,1,9].
Матрица A2 имеет собственные значения A1 = —0,106, A2 = —1, 894; матрица же (A2)-1 B2 имеет собственные значения р1 = 0, 067 и р2 = 0, 881. Следовательно, решение x(t) системы экспоненциально устойчиво. Но ввиду того, что малый положительный параметр при у‘(т) в системе достаточно мал, решение у(т) сингулярной системы также экспоненциально устойчиво, что подтверждается и тем, что корни ν характеристического уравнения det{A2 + B2 exp v —0,15vE} = 0
удовлетворяют неравенству Re(v) < — 0, 012. Графики решений систем (5) и (6) различаются, как это видно на рисунках 1 и 2 соответственно, но не очень существенно.
-
1. Успокоение некоторых систем с линейным запаздыванием
При рассмотрении подобных управляемых систем вида dx(t)
—— = Ax(t) + Bx(pt) + Cu, р = const, 0 < р < 1, t > t 0 > 0, (9)
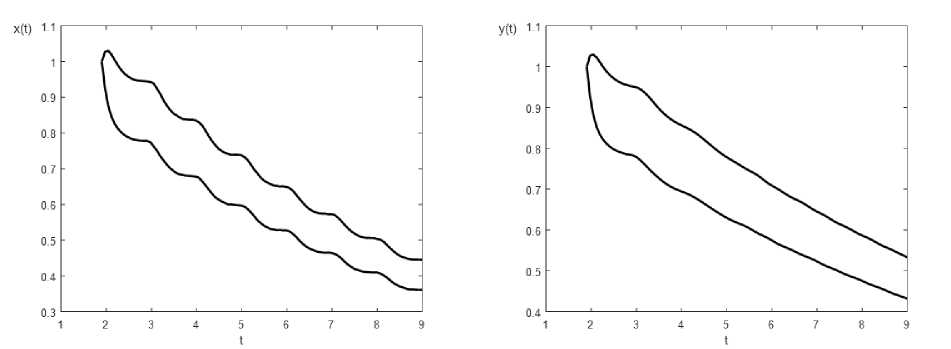
Рис. 1 . График решения системы (5)
Рис. 2 . График решения системы (6)
где u — вектор-функция управляющего воздействия размерности 1 < r < m в случае неустойчивости, а именно при и = 0, может быть предложен следующий алгоритм стабилизации: в начале стабилизируем систему без запаздывания
У^ = Ay(t) + Cu 1 , ^ = const, 0 < ц < 1, ,t > t 0 > 0, dt
то есть решаем задачу Летова, получая ≪исправленную≫ матрицу As . Некоторые методы стабилизации таких систем предложены в [2]. В случае неустойчивости (при и = 0) полученной системы dx1 (t)
——A 1 = A s x 1 (t) + Bx 1 (^t) + Cu, ^ = const, 0 < ц < 1, t > t 0 > 0 (11)
d производим запаздывающими членами дальнейшую стабилизацию уже вырожденной системы вида
x(t) = - (A s ) -1 Bx(pt) — (A s ) -1 Cu 2 , ^ = const, t > t 0 > 0 (12)
и получаем асимптотически устойчивую дискретную систему. Методы стабилизации таких дискретных систем изложены, например в [3, 4]. Если теперь в исходной системе положить управление и 0 = u 1 + u 2 , то получим систему с линейным запаздыванием, для которой выполняются условия (9), то есть система асимптотически устойчива.
Но подобным же образом можно стабилизировать и систему с малым параметром при производной. Здесь вычисление корней характеристического уравнения при разных значениях малого параметра ε требует определенного объема работы. В процессе стабилизации стандартными методами решения нелинейных уравнений типа Ляпунова также отличаются друг от друга при различных е > 0. Для успокоения таких сингулярных уравнений целесообразен следующий алгоритм стабилизации. Он применим как к системе с постоянным запаздыванием и с экспоненциальным множителем в правой части, так и к сингулярной системе с постоянным запаздыванием. Именно, на первом этапе ≪исправляем≫ матрицу A, то есть решаем задачу Летова, получаем матрицу As . В случае неустойчивости системы уже с матрицей As , на втором этапе ≪исправляем≫ матрицу -As-1B. Для этого, например, решаем задачу стабилизации разностной системы zn+1 = —AS 1Bzri — As 1Cvn.
Возникает вопрос о роли малого параметра при производной, именно, его влиянию на устойчивость.
Пусть рассматривается вопрос об абсолютной устойчивости стационарной системы dУ(Т) = Ау(т) + Ву(т - а). (13)
dτ
Известно [5], что необходимым и достаточным критерием является совокупность условий
Re (А) < — 2в, в = const, в > 0,
|р| <6, 6 = const, 0 < 6 < 1, где р - собственные значения матрицы (A+ivE) 1B, v - любое действительной число, i = V—1. Данные условия совпадают с условиями (9) в скалярном случае. В случае систем это не так. Если же рассмотреть теперь соответствующие системы, то данное утверждение становится неверным. Пусть на тело единичной массы, движение которого описывается уравнением второго порядка, действуют также запаздывающие силы: ≪восстанавливающая≫ и ≪трение≫. В общем случае данное уравнение имеет вид 2
dxtL + a^tL + bx(t) + c dXt ~ а) + dx(t - а) = 0. (15)
dt 2 dt dt
Заменим это уравнение системой dx(t) dt dy (t) dt
y ( t ) ,
- bx ( t ) - ay ( t ) - dx ( t - а ) - cy ( t - а ) .
Условиями знакоотрицательности действительности части собственных значений λ
матрицы A =
(
ниями матрицы
- b
- a
)
являются неравенства a > 0, b > 0. Собственными значе-
— A 1 B являются величины 0 и db 1 . Окончательно, при достаточно
большом запаздывании получаем совокупность неравенств
a > 0,b > 0, | d | < b. (17)
Условиями же абсолютной устойчивости наряду с этими неравенствами являются требования [5]
| c | 2, \ d \ < a2 — c 2 . (18)
Очевидно, в случае абсолютной устойчивости соответствующие системы как с малым параметром при производной, так и система с линейным запаздыванием асимптотически устойчивы. Этот факт позволяет использовать схожий алгоритм для стабилизации систем с линейным запаздыванием в случае существования алгоритма стабилизации стационарной системы типа (16), имеющего вид и(т ) = К 1 у(т ) + K 2 у(т — а). При этом предполагается, что матрицы K j не зависят от величины σ .
Асимптотическая устойчивость некоторых систем, с линейным запаздыванием, например, при µ достаточно близких к единице, может решаться с применением знакоопределенных функционалов Ляпунова – Красовского типа mt
V = W(x) + ^^Vj / x j (s)ds. (19)
j =1 µt
Здесь W(x) - положительно определенная квадратичная форма, скалярные величины Vj =0. Приведем простейший пример. Рассмотрим уравнение первого порядка dx(t) d
t = ax(t) + b(t)x(^t).
Здесь a = const, a < 0, b(t) - скалярная функция времени - аргумента t.
Для получения достаточных условий устойчивости решения уравнения (20)
дем функционал
V 0 (Х а ,t)
- ax2
(t) + a f
µt
(x 2 (s)ds.
вве-
Здесь константа a является отрицательной. Полагая a = —а, вычисляем в силу уравнения (20), производную dV 0(x0, t) dt
= a(x 0 ) 2 + 2b(t)x 0 (t)x 0 (^t) + ^a(x° (^t)')2 .
Требуем отрицательной определенности получившейся квадратичной формы переменных x°(t) x 0 (^t) [6], получаем достаточные условия асимптотической устойчивости решения уравнения (20)
a < 0, | b(t) | < ^ ^{a — e )
здесь ε – достаточно малое положительное число. Если исследовать поведение решения уравнения (10), например, при b = const, более точными методами [1], то получаем совокупность неравенств a < 0, |b| < |a|,
справедливую при любом 0 < ^ < 1. Тем не менее, при ц ^ 1 границы области (21) достаточно близки к границам области (23). Отметим что, исследуя неустойчивость подобных систем, можно получить весьма неплохие результаты, если рассмотреть функционал
V a ( t,z ( t )) = e т z 2
(т ) + a /
τ
σ
z 2 (d)dd
dV a ( t,z ( t ))
и вычислить dτ
в силу (20). Аналогично получаем более общие достаточные условия неустойчивости при a > 0, |b| < a. Таким образом, применение функционалов типа Va (т, z(t)) позволяет получать достаточные условия неустойчивости и для некоторых нелинейных систем.
2. Исследование асимптотических свойств некоторых нестационарных систем нейтрального типа при параметре 0 < ^ < 1
Дальнейшим обобщением для исследования асимптотических свойств систем с линейным запаздыванием являются системы нейтрального типа
—= A(t)x(t) + eB(t)x(^t) + R(t) —Ц-- М = const, 0 < ц < 1, t > t0 > 0, (24) dt dt где R(t~) - непрерывно дифференцируемая матрица размерности m х m, Е > 0 - малое положительное число. Полагаем, что для данной матрицы имеем неравенство
|| sup ||R(t
)|| <
Y
|
x(^t)
|
,
y
= const, 0
и при этом справедлива оценка dR(t)
suP t≥t0 dt
< 5 | x(yt) | , 5 = const, 5> 0,
постоянная δ достаточно мала. Преобразуем эту систему к следующему виду
(x[t) — R(t)x(yt)\ = A(t)x(t) + eB(t)x(yt) — x^d,^ t > t0 > 0.(27)
dtdt dt
Очевидно, системой первого приближения является система нейтрального вида dt ^x0(t) — R(t')x°(^t')\ = A(t)x°(t).(28)
Полагаем, что решение ≪укороченной≫ системы, то есть системы (28) без нейтраль- d^ =,29)
dt экспоненциально устойчиво, следовательно, справедлива оценка
^B
||y0(t)| < Ce-e(t-t0)|y0(t0)|, C = const, C > 1, в = const, в> 0, t > t0.(30)
При этом будем рассматривать разностное неравенство
| Z(t>y(^t) l = | y(t) — R(t)y (М^ | < f (t), У 0 = V,
где f (t) - неотрицательная непрерывная скалярная функция. Отметим, что предполагается ограниченность производной от начальной вектор-функции η . Заметим, dη что если теперь перейти к системе с постоянным запаздыванием, получаем соотношение
dz(T ) dτ
= t 0 e T [ A ( t ) z ( t ) + B ( t ) z ( t
— а)] + ^R ( t )dz(T — а)/dr,
R ( t ) = R(t 0 eT ). Для дальнейших исследований систем нейтрального типа введем несколько определений.
Определение 1. Решение линейной системы (5) x(t), определенное кусочно непрерывно начальной вектор-функцией ф(п), называется устойчивым, если существует постоянная C > 0, такая, что из условия ограниченности величины | ф(п) | следует неравенство | x(t, ф(п)) | < C .
Определение 2. Если решение x(t, ф(п)), наряду с устойчивостью, обладает свойством lim x(t,ф(n)) = 0, то решение асимптотически устойчиво.
t →∞
Далее, будем рассматривать асимптотические свойства решения разностного неравенства (28).
Определение 3. Решение разностного неравенства (31) x(t), определенное непрерывно дифференцируемой вектор-функцией ф(п), называется f -устойчивым, если для любого e > 0 найдется постоянная 5(e) > 0, такая, что при всех начальных условиях в правых частях таких, что ф(п) Ц < 5(e), sup < 5(e) будет | y(t, ф) | < e при всех t ≥ t 0 t > t 0 .
Отметим, что из условия ограниченности величины sup | ф(п) | +sup || d^Kn || следует
η
η
II / . / / Wil неравенство |x(t,ф(n))| < C0.
Определение 4. Решение разностного неравенства (31) х(;), определенное непрерывно дифференцируемой вектор-функцией ф(п), называется асимптотически f - устойчивым, если оно f -устойчиво и, сверх того, lim х(;,ф(п)) = 0 при всех ф(п). t →∞
Более подробно о свойствах f -устойчивых и асимптотически f -устойчивых подобных отображений смотри, например, в [7].
Рассмотрим систему первого приближения нейтрального типа с линейным запаздыванием в виде (28). Известно [6], что ввиду оценки (30) существует функция Ляпунова V(t, х) такая, что справедливы соотношения
^ 1 ( | х | ) < V(;,х) < ^ 2 ( | х | ),
dV
dt
dV ^ dV dx j
∂t ∂x dt j=1 j
< - ш 3 ( | х | ).
Здесь W j (r), W j (0) = 0, r > 0 - некоторые неубывающие функции. Рассмотрим теперь функционал W(t,Y(;,х(^;)). Очевидно,
W1(|Z(^х(^)|) < W(;,х(^;) < w2(|Z(;,х(^;), dW = dW ^m dW dZj dt ∂t ∂Z dt j=1 j
< - W3QZ(t,х(^ | ).
Далее, получим оценки для решения разностного неравенства (31). Для получения
равномерных оценок удобнее сделать замену переменной τ
In
(;j
. Тогда для
величины y n = sup y ( t ) из (31) имеем неоднородное разностное неравенство
т E [(n - 1)a,na]
У п < Yy n - 1 + sup f (т ), т > 0
откуда, используя формулу вариации постоянных [8], получаем оценку
Y 1
sup y n<- ----- sup ||^(n)H + ;-----sup f (т ).
n 1 — Y n G [ - CT, 0] 1 — Y T > 0
Более того, имеем уточненную асимптотическую оценку fk+1
1 - Y’ (35)
Уп+m < Yn+k sup II^MII + Yn-f- + nG[-^,0] 1 - Y fj = sup f(т), j = 1 2,..., T >(j — 1)^
то есть yn+m 4 0 при n ^ ж, m ^ то. Это является подтверждением того, что решение разностного неравенства (31) асимптотически f -устойчиво. Как следует из результатов [7], в силу асимптотической f -устойчивости неравенства следует асимптотическая устойчивость решения уравнения первого приближения. Отметим, что при исследовании влияния нейтральных членов результаты асимптотической экспоненциальной устойчивости были в переменной τ . Если же перейти к переменной t, то получим степенную оценку для асимптотической устойчивости вида x0(t) ^ M
tt 0
, M = const, M > 1,5 = const,
5 > 0.
Рассмотрим теперь асимптотические свойства исходной системы (27). В работе [9] доказано, что ввиду оценок (30), (36) и достаточной малости величин 5 и f из асимптотической устойчивости уравнения первого приближения следует асимптотическая устойчивость и исходной системы (27). Экспоненциальная устойчивость систем нейтрального типа изучалась в работе [10].
