Особенности постурального контроля у лица с трансфеморальной ампутацией в условиях двойной задачи

Автор: Байгужин П.А., Меркульев Ф.В.
Журнал: Человек. Спорт. Медицина @hsm-susu
Рубрика: Физиология
Статья в выпуске: 4 т.25, 2025 года.
Бесплатный доступ
Цель: выявить особенности постурального контроля у лица с трансфеморальной ампутацией при ходьбе в условиях выполнения двойной задачи с активной опцией обратной связи. Материалы и методы. На экспериментальном стенде, представленном комбинацией методов оценки сенсомоторных реакций, постурального баланса, реализуемых в статическом и динамическом режимах (на тредбане) с различной скоростью ходьбы, обследован испытуемый с односторонней трансфеморальной ампутацией левой конечности. Когнитивная нагрузка представлена сенсомоторными тестами с опцией обратной связи, активируемой при совершении ошибочных действий. Результаты. Выявленные особенности постурального контроля у испытуемого с трансфеморальной ампутацией детерминируются двумя факторами: скоростью ходьбы и спецификой когнитивной задачи. Условия статической треморометрии оказывают наименьшее дестабилизирующее влияние на постуральный баланс за счет фокусировки внимания; проба «Реакция на движущийся объект» является самой сложной задачей, вызывает наибольшее дестабилизирующее влияние. Заключение. Установлено, что не существует единой «зоны риска» – риск падения при выполнении двойной задачи кардинально меняется в зависимости от темпа движения и особенностей когнитивной нагрузки. Полученные результаты ценны для понимания механизмов постуральной устойчивости у ампутантов и могут быть применены в практике абилитации для разработки более эффективных методик тренировки ходьбы в реальных условиях.
Ампутанты, постуральный контроль, парадигма «двойная задача», многозадачность, ходьба, сенсомоторная реакция, биологическая обратная связь
Короткий адрес: https://sciup.org/147253287
IDR: 147253287 | УДК: 796.012.412.4;612.76 | DOI: 10.14529/hsm250410
Characteristics of postural control in an individual with transfemoral amputation under dual-task conditions
Aim. This study aims to identify the features of postural control in a person with transfemoral amputation during walking under dual-task conditions incorporating active biofeedback. Materials and methods. A participant with unilateral transfemoral amputation of the left limb was examined on an experimental setup comprising a combination of methods for assessing sensorimotor reactions and postural balance in both static and dynamic conditions (on a treadmill) at various walking speeds. The cognitive load was implemented via sensorimotor tasks with error-induced biofeedback. Results. The identified features of postural control in the participant with transfemoral amputation are determined by walking speed and the nature of the cognitive task. The conditions of static tremorometry have the least destabilizing effect on postural balance due to focused attention. Conversely, the Reaction to a Moving Object test is the most difficult task and causes the greatest destabilization. Conclusion. The study findings demonstrate that there is no single risk zone because the risk of falling under dual-task conditions changes drastically depending on walking speed and the nature of the cognitive load. The results obtained are of particular importance for understanding the mechanisms of postural balance in amputees and can be used in habilitation practice to develop more effective walking training programs for real-world conditions.
Текст научной статьи Особенности постурального контроля у лица с трансфеморальной ампутацией в условиях двойной задачи
P.A. Baiguzhin, , F.V. Merkulyev, , South Ural State University, Chelyabinsk, Russia
Введение. В основе парадигмы «двойная задача» находится феномен многозадачности, возникающий в условиях, когда когнитивные процессы, вовлеченные в выполнение двух (чаще более) задач, «перекрываются» во времени. Когнитивные процессы протекают одновременно во времени и в рамках разных задач, поэтому они одновременно представлены в сознании. Условия многозадачности – это всегда необходимость учитывать влияния множеств факторов (в различном их сочетании и комбинациях). Очевидно, что контроль и реагирование на стимулы нескольких задач сопровождается прерываниями одной и возобновлением другой задачи, что предъявляет повышенные требования к свойствам внимания, в частности – переключению.
Одновременное выполнение задач характеризуется определенной степенью «временного их перекрытия», и чем оно более длительное, тем медленнее реагирование на вторую задачу [6]. Как правило, уже при оперативном планировании взаимодействия этих задач формируется специфическая функциональная система, отличающаяся степенью напряжения в силу требуемых для этого ресурсов.
Фундаментальным ограничением когнитивных способностей является то, что мозг не обрабатывает всю информацию с одинаковой точностью. Избирательное внимание относится к нашей способности направлять умственные ресурсы на обработку информации релевантной задачи и отвлекаться от нерелевантной [2].
Многочисленные результаты исследований подтвердили гипотезу о том, что двойные задачи способствуют восстановлению автоматизма постурального контроля как важнейшей характеристики процесса центральной реорганизации системы произвольной регуляции движений у лиц с ампутацией нижних конечностей [3–5].
В качестве стимульного воздействия «второй» задачи (первая – локомоция, например, ходьба) часто используют стандартные задания: тест Струпа [3], арифметические действия [9], комбинации стимулов, требующих активации сложного зрительно-моторного реагирования [10].
Наряду с классическими последнее десятилетие активно используются сравнительно высокотехнологичные методы оценивания эффектов «двойной задачи» при тестировании лиц с ампутациями (функциональная спектроскопия в ближнем инфракрасном диапазоне, ЭЭГ) [5, 10], отражающие нейронные механизмы, критически важные для поддержания их когнитивно-моторной активности.
Во многих исследованиях ходьбы с двойной задачей изучались варианты проявления свойств «резервов» внимания, «умственного усилия» [10, 11], однако нам не встречались работы, в которых предметом исследования являлись эффекты, вызванные условиями одновременного выполнения сенсомоторных тестов с обратной связью, предъявляющих высокие требования к проявлению точности движений, концентрации и переключаемости внимания.
Внедрение технологий на основе биологической обратной связи достаточно популярно в практике абилитации ампутантов [4, 7]. Однако применение условия «обратной связи» в виде сбивающего фактора при решении испытуемым «двойной задачи» существенно повышает требования к ресурсам внимания:
увеличивает либо снижает время сенсомоторного реагирования. Анализ этих реакций, в свою очередь, позволит оценить ведущий когнитивный тип испытуемого (например, рефлексивный или импульсивный), что является важным фактором активной протезной реабилитации.
Цель – выявить особенности постурального контроля у лица с односторонней (левой) трансфеморальной ампутацией при ходьбе в условиях выполнения двойной задачи с активной опцией обратной связи.
Материалы и методы. В обследовании на базе НИЦ спортивной науки ЮУрГУ (НИУ) принял участие 34-летний испытуемый с левой трансфеморальной ампутацией 11-летней давности и восстановленной в результате эффективных абилитации и реабилитации без-опорной активной ходьбой на протезе. Обследование включает четыре ключевые точки: 1) диагностика постурального баланса в положении стоя (фон), 2) то же, но стоя при выполнении сенсомоторных тестов, 3) третья – то же, но при ходьбе (фон) и 4) то же, но при выполнении сенсомоторных тестов при ходьбе. На второй и четвертой точках выполнялись сенсомоторные тесты: «Статическая треморо-метрия» (в таблицах обозначается как «СТ»); «Реакция на движущийся объект» («РДО») и «Реакция различения» («РР»), призванные моделировать условия когнитивной нагрузки как части парадигмы «двойная задача». В настоящем исследовании данные, полученные при сенсомоторном тестировании, не представлены, так как важными были изменения параметров постуральной устойчивости у обследуемого лица, вызванные специфическими требованиями процедуры тестирования. Так, при выполнении теста «СТ» обследуемому необходимо на вытянутой руке удерживать щуп в отверстии прибора, не касаясь его краев (оценивается произвольная регуляция движения руки). Суть теста «РДО» заключается в своевременном реагировании нажатием на кнопку прибора (который испытуемый держит свободно в руке) в момент, когда движущийся объект «коснется» стимульной границы (оценивается точность реагирования, детерминируемая уравновешенностью нервных процессов). При выполнении теста «РР», испытуемому нужно быстро нажать на кнопку прибора (держит свободно в руке), в момент появления стимульного светового сигнала определенного цвета, реакция на другие цвета ошибочная (проверяется сложная сенсомоторная реакция, которую испытуемый должен дифференцировать). При выполнении тестов «СТ» и «РР» ошибочные реакции сопровождались кратковременным «тревожным» звуковым сигналом, что является частью дизайна обследования, обеспечивающей концентрацию внимания у испытуемого.
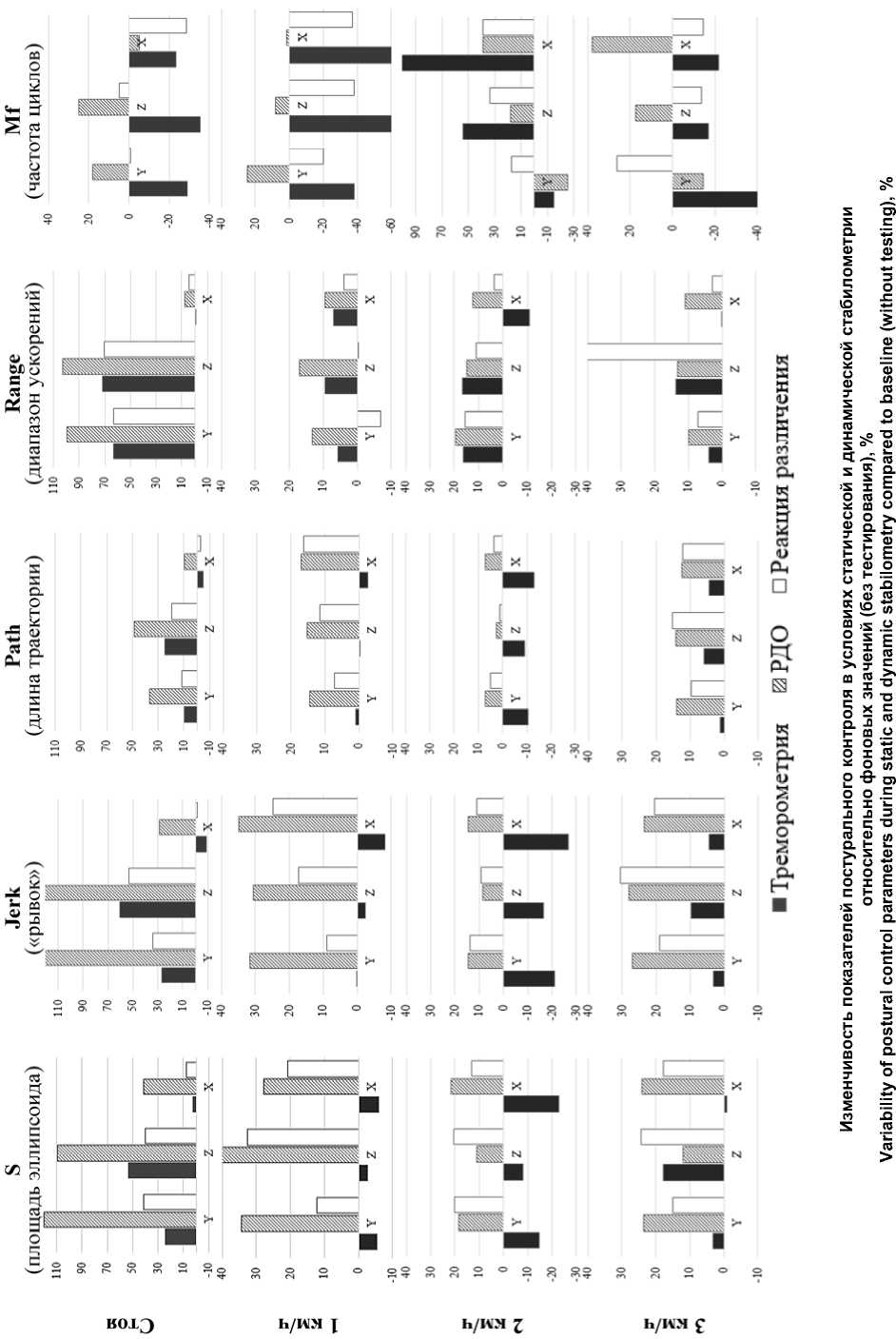
Постуральный баланс оценивался с помощью инерционного сенсора, закрепленного на уровне крестца у обследуемого. Регистрировались параметры ускорения центра масс (колебания тела) в трех взаимно перпендикулярных плоскостях: фронтальной (Y – колебания вперед – назад), горизонтальной (Z – вверх – вниз) и сагиттальной (X – вправо – влево): S – площадь проекции 95 % доверительного эллипсоида ускорения; Jerk – рывок как производная от ускорения по времени (диапазон изменений акселерометрического сигнала); Path – длина траектории по ускорению; Range – диапазон ускорений; Mf – средняя частота (число циклов в секунду, которое должно быть пройдено чтобы покрыть траекторию по ускорению). Методология интерпретации указанных параметров следующая: увеличение их значений свидетельствует о снижении постуральной устойчивости; тело совершает больше колебаний, движения становятся более резкими (высокий Jerk) и менее плавными; снижение частоты (Mf) – о более медленных, корректирующих колебаниях, что также трактуется как признак напряжения системы постурального контроля.
Измерения на всех точках проходят «стационарно» – стоя на беговой дорожке Life Fitness (Brunswick Corporation, США) и при по ходьбе. Измерения в ключевых точках № 3 и 4 осуществляются при ходьбе по дорожке с нулевым углом ее наклона с указанными выше скоростями движения ленты. Длительность тестирования на каждой точке – 30 с. В связи с высокой чувствительностью инерционного сенсора «Нейросенс» испытательный стенд организован таким образом, чтобы исключить помехи, связанные с необоснованными отклонениями (движениями) тела обследованного во время тестирования: все стимульные сигналы представлялись на мониторе и приборах, расположенных на уровне глаз испытуемого прямо впереди по ходу ходьбы.
Обработка данных сведена к расчету относительных величин клиренсов – процентных отношений к фоновым значениям и орга- низации данных для последующей графической подготовки, которая проводилась в табличном процессоре Microsoft Excel 2016. Методологический подход, применяемый в настоящем исследовании, согласуется с аналогичными работами, характеризующими надежность результатов динамического баланса, полученных методом повторного тестирования взрослых с односторонней ампутацией нижней конечности [1].
Результаты. Основная задача анализа полученных данных заключалась в интерпретации приростов (по отношению к фону) показателей постурального баланса для каждого сенсомоторного теста, а именно в выявлении общих и различных процессов постурального контроля у испытуемого. В основе интерпретации – парадигма «двойной задачи» – одновременное выполнение двигательного акта (ходьбы) и дополнительной и одновременной когнитивной сенсомоторной задачи, что является значительным усилием при контроле походки ампутанта на протезе.
В табл. 1 и 2 представлены абсолютные значения ускорений сенсора, расположенного на уровне крестца испытуемого с трансфеморальной ампутацией левой ноги в условиях выполнения «двойной задачи» стоя и при ходьбе с различной скоростью.
Выполнение когнитивных задач в статическом положении оказывает влияние на показатели постурального баланса: все три теста приводят к увеличению площади колебаний (S) с выраженным влиянием теста «РДО». По всем параметрам (S, Jerk, Path, Range) наблюдается прирост (от +35 до +160 %), особенно во фронтальной и горизонтальной плоскостях (см. рисунок). Задача, требующая точного временного реагирования, серьезно дестабилизирует позу стояния.
Условия выполнения тестов «СТ» и «РР» оказывают менее выраженное влияние, что проявляется в приросте параметров постурального баланса в пределах +10 до +70 %. Интересно, что для «СТ» и «РР» параметр Mf (средняя частота) имеет отрицательный клиренс (на –20…–35 %), что указывает на переход к произвольной корректировке позы для компенсации помехи от условий выполнения сенсомоторной задачи.
Ходьба со скоростью 1 км/ч
Очевидно, что при сравнении со статическим режимом влияние «двойной задачи» в движении качественно иное и более выраженное.
Изменчивость показателей S, Jerk, Path параметров при ходьбе с данной скоростью наибольшая при решении сенсомоторной задачи «РДО» (+15 до +40 % по разным плоскостям; условия выполнения теста «РР» оказывают среднее, а «СТ» – относительно наименьшее влияние на постуральный баланс тела. Во всех трех плоскостях и для тестов «СТ» и «РР» наблюдается резкое снижение Mf (на –20 % и более). Например, в горизонтальной и сагиттальной плоскостях в тесте «СТ» частота падает с 1,20 до 0,44 Гц (на ~63 %). В отличие от других параметров, Range, характеризующий диапазон ускорений, при ходьбе меняется менее выражено, а при реализации теста «РР» в фронтальной плоскости с 4,36 до 4,06 Гц). Это может указывать на снижение плавности движений и частоты колебаний (Jerk, Path, Mf) с целью удержания амплитуды (Range) в определенных пределах, что в совокупности направлено на минимизацию риска падения.
Ходьба со скоростью 2 км/ч
На этой скорости наблюдается ослабление влияния условий «двойной задачи» по сравнению с движением со скоростью 1 км/ч. При выполнении теста «СТ» походка стабилизируется, что выражено в снижении параметров S, Jerk, Path (от –10 до –25 %) по всем плоскостям. Данная реакция связана с лучшей фокусировкой на движении с повышенной концентрацией внимания испытуемым в ответ на обратную связь в виде звукового сигнала при совершении ошибочных действий (увеличения тремора). В указанных условиях активируется стратегия произвольной регуляции движений по типу индукции волевого самоконтроля.
Влияние условий тестирования «РДО» и «РР» на показатели постурального баланса менее выражено, чем на скорости 1 км/ч, однако прирост S, Jerk и Path (в среднем от +5 % до +20 %) указывает на дестабилизирующее воздействие.
В условиях треморометрии частота циклов (Mf) резко растет (на 100 %) в сагиттальной плоскости, что может свидетельствовать о компенсаторном увеличении темпа шагов. В условиях выполнения теста «РДО», напротив, – падает, что согласуется с предыдущими данными. Предварительно можно сделать заключение о возможности большей свободы постурального управления при выборе компенсаторной стратегии при ходьбе на скорости 2 км/ч.
Таблица 1
Table 1
Абсолютные значения ускорений (локализация сенсора – крестец – проекция L5) у испытуемого с трансфеморальной ампутацией левой ноги в условиях выполнения «двойной задачи» стоя и при ходьбе со скоростью 1 км/ч
Absolute acceleration values at the sacrum (L5 projection) in a subject with transfemoral amputation of the left limb under dual-task conditions (standing and walking at 1 km/h)
|
Параметр, ед. изм. Parameter, unit. |
Стоя / Standing |
Ходьба (1 км/ч) / Walking (1 km/h) |
||||||
|
Фон Baseline |
СТ ST |
РДО RMO |
РР DR |
Фон Baseline |
СТ ST |
РДО RMO |
РР DR |
|
|
Фронтальная плоскость (Y) / Frontal plane (Y) |
||||||||
|
Площадь эллипсоида, м2/с4 S, m2/s4 |
0,002 |
0,002 |
0,004 |
0,002 |
4,39 |
4,15 |
5,90 |
4,93 |
|
Рывок, м2/с5 Jerk, m2/s5 |
0,195 |
0,246 |
0,432 |
0,261 |
599,44 |
599,84 |
789,49 |
652,80 |
|
Длина траектории, м/с2 Path, m/s2 |
3,007 |
3,298 |
4,102 |
3,355 |
148,92 |
150,39 |
170,60 |
159,50 |
|
Диапазон ускорений, м/с2 Range, m/s2 |
0,036 |
0,059 |
0,072 |
0,059 |
4,36 |
4,61 |
4,94 |
4,06 |
|
Частота циклов, Гц Mf, Hz |
2,177 |
1,543 |
2,571 |
2,157 |
1,45 |
0,90 |
1,81 |
1,16 |
|
Горизонтальная плоскость (Z) / Horizontal plane (Z) |
||||||||
|
Площадь эллипсоида, м2/с4 S, m2/s4 |
0,001 |
0,001 |
0,002 |
0,001 |
7,21 |
7,02 |
10,33 |
9,57 |
|
Рывок, м2/с5 Jerk, m2/s5 |
0,139 |
0,223 |
0,370 |
0,213 |
654,75 |
638,47 |
854,75 |
768,45 |
|
Длина траектории, м/с2 Path, m/s2 |
2,484 |
3,105 |
3,688 |
2,964 |
159,72 |
159,21 |
184,27 |
177,88 |
|
Диапазон ускорений, м/с2 Range, m/s2 |
0,035 |
0,059 |
0,070 |
0,059 |
4,65 |
5,08 |
5,44 |
4,63 |
|
Частота циклов, Гц Mf, Hz |
2,161 |
1,394 |
2,703 |
2,266 |
1,20 |
0,44 |
1,29 |
0,74 |
|
Сагиттальная плоскость (X) / Sagittal plane (X) |
||||||||
|
Площадь эллипсоида, м2/с4 S, m2/s4 |
0,001 |
0,001 |
0,002 |
0,001 |
4,86 |
4,58 |
6,22 |
5,87 |
|
Рывок, м2/с5 Jerk, m2/s5 |
0,132 |
0,120 |
0,170 |
0,129 |
565,69 |
519,78 |
763,88 |
705,83 |
|
Длина траектории, м/с2 Path, m/s2 |
2,468 |
2,354 |
2,710 |
2,392 |
145,04 |
141,14 |
169,65 |
168,57 |
|
Диапазон ускорений, м/с2 Range, m/s2 |
0,032 |
0,032 |
0,035 |
0,034 |
3,16 |
3,38 |
3,47 |
3,28 |
|
Частота циклов, Гц Mf, Hz |
2,245 |
1,719 |
2,124 |
1,600 |
1,37 |
0,43 |
1,40 |
0,87 |
Примечание: методика «СТ» – «Статическая треморометрия», «РДО» – «Реакция на движущийся объект»; «РР» – «Реакция различения».
Note: «ST» – «Static tremorometry», «RMO» – «Reaction to a moving object», «DR» – «Discrimination reaction».
Таблица 2
Table 2
Абсолютные значения ускорений (локализация сенсора – крестец – проекция L5) у испытуемого с трансфеморальной ампутацией левой ноги в условиях выполнения «двойной задачи» стоя и при ходьбе со скоростью 2 и 3 км/ч
Absolute acceleration values at the sacrum (L5 projection) in a subject with transfemoral amputation of the left limb under dual-task conditions (standing and walking at 2 and 3 km/h)
|
Параметр, ед. изм. Parameter, unit. |
Ходьба (V = 2 км/ч) / Walking (2 km/h) |
Ходьба (V = 3 км/ч) / Walking (3 km/h) |
||||||
|
Фон baseline |
СТ ST |
РДО RMO |
РР DR |
Фон baseline |
СТ ST |
РДО RMO |
РР DR |
|
|
Фронтальная плоскость (Y) / Frontal plane (Y) |
||||||||
|
Площадь эллипсоида, м2/с4 S, m2/s4 |
14,61 |
12,46 |
17,32 |
17,57 |
23,89 |
24,64 |
29,49 |
27,49 |
|
Рывок, м2/с5 Jerk, m2/s5 |
2221,91 |
1754,81 |
2542,66 |
2529,77 |
3189,96 |
3287,13 |
4057,66 |
3800,56 |
|
Длина траектории, м/с2 Path, m/s2 |
285,55 |
255,98 |
306,17 |
300,26 |
337,87 |
341,78 |
385,16 |
370,93 |
|
Диапазон ускорений, м/с2 Range, m/s2 |
3,68 |
4,27 |
4,40 |
4,26 |
4,52 |
4,69 |
4,97 |
4,84 |
|
Частота циклов, Гц Mf, Hz |
1,83 |
1,55 |
1,37 |
2,14 |
1,66 |
0,89 |
1,42 |
2,09 |
|
Горизонтальная плоскость (Z) / Horizontal plane (Z) |
||||||||
|
Площадь эллипсоида, м2/с4 S, m2/s4 |
17,14 |
15,79 |
19,04 |
20,68 |
24,27 |
28,58 |
27,17 |
30,20 |
|
Рывок, м2/с5 Jerk, m2/s5 |
1887,54 |
1575,01 |
2047,91 |
2063,20 |
2800,61 |
3075,77 |
3588,79 |
3661,32 |
|
Длина траектории, м/с2 Path, m/s2 |
277,13 |
251,84 |
284,24 |
280,24 |
335,37 |
355,09 |
383,32 |
386,14 |
|
Диапазон ускорений, м/с2 Range, m/s2 |
4,20 |
4,90 |
4,82 |
4,66 |
4,45 |
5,07 |
5,04 |
6,68 |
|
Частота циклов, Гц Mf, Hz |
0,84 |
1,29 |
0,99 |
1,12 |
1,10 |
0,91 |
1,29 |
0,95 |
|
Сагиттальная плоскость (X) / Sagittal plane (X) |
||||||||
|
Площадь эллипсоида, м2/с4 S, m2/s4 |
14,39 |
11,11 |
17,48 |
16,29 |
25,66 |
25,45 |
31,86 |
30,25 |
|
Рывок, м2/с5 Jerk, m2/s5 |
2001,40 |
1468,18 |
2294,85 |
2220,26 |
3596,12 |
3757,66 |
4442,62 |
4334,10 |
|
Длина траектории, м/с2 Path, m/s2 |
277,48 |
241,62 |
297,71 |
287,35 |
371,65 |
387,73 |
418,44 |
417,46 |
|
Диапазон ускорений, м/с2 Range, m/s2 |
3,83 |
3,41 |
4,31 |
3,96 |
4,77 |
4,77 |
5,29 |
4,91 |
|
Частота циклов, Гц Mf, Hz |
0,84 |
1,69 |
1,17 |
1,16 |
1,20 |
0,94 |
1,66 |
1,03 |
Примечание: обозначения те же, что в табл. 1.
Note: see in Table 1.
Ходьба со скоростью 3 км/ч
На данной скорости ходьбы система постурального контроля претерпевает сравнительно максимальную нагрузку на функциональную систему произвольной регуляции движений в условиях «двойной задачи». Отмечается прирост параметров S, Jerk, Path в условиях выполнения всех тестов (от +5 до +20 % для «СТ» и до +30 % для тестов «РДО» и «РР»). Функциональная система больше не имеет «ресурсов» для стабилизации контроля; любая дополнительная задача ухудшает плавность ходьбы. Наблюдается наибольший прирост Range, особенно для теста «РР» в горизонтальной плоскости (с 4,45 до 6,68 – прирост ~50 %). Считаем это важным наблюдением: на высоких (повышенных) скоростях ходьбы «двойная задача» приводит не только к увеличению Jerk («рваность», резкие рывки в движении), но и к росту размаха колебаний тела, что напрямую связано с риском потери равновесия . Параметр Mf (средняя частота) при треморометрии резко снижается (например, во фронтальной плоскости с 1,66 до 0,89 Гц – на ~46 %). Это вынужденная перестройка паттерна ходьбы в пользу более контролируемого.
Обсуждение. Полученные результаты целесообразно интерпретировать с позиций формируемых особенностей в паттерне шага (ходьбы) испытуемого с возрастающей скоростью его передвижения.
Ходьба со скоростью 1 км/ч характеризуется дестабилизацией походки и перестройкой постурального контроля. Добавление когнитивной нагрузки приводит не к ухудшению, а к качественной перестройке паттерна ходьбы в сторону произвольного более медленного и контролируемого передвижения. Коррекция паттерна ходьбы происходит за счет снижения плавности и повышения нестабильности и «рваности» (рывковости) элементов техники. Сформированная функциональная система регуляции движения и постурального баланса работает на пределе.
Вышеописанные эффекты влияния двойной задачи на постуральный баланс ослабевают при ходьбе со скоростью 2 км/ч, характеризуя паттерн передвижения как наиболее адаптивный за счет включения компенсаторных процессов (отрицательный клиренс для S, Jerk, Path в тесте «СТ»). Автоматизация походки, вероятно, «высвобождает» ресурсы внимания.
На скорости ходьбы 3 км/ч наблюдается возрастание нестабильности, свидетельствующее о системной перегрузке механизмов произвольной регуляции движений в условиях «двойной задачи». Стабильный прирост S, Jerk, Path для всех тестов указывает на нарушение плавности ходьбы; а прирост Range (особенно для «РР» в горизонтальной плоскости +50 %) – на повышение риска падения. Компенсаторным процессом считаем резкое снижение Mf (частоты циклов ускорений).
Заключение. Выявленные особенности постурального контроля у испытуемого с трансфеморальной ампутацией детерминируются в том числе двумя факторами: скоростью ходьбы и спецификой сенсомоторной (когнитивной) задачи. Именно сочетание этих факторов индуцирует различную степень произвольной регуляции движения. Условия статической треморометрии, оказывают наименьшее дестабилизирующее влияние на постуральный баланс за счет фокусировки внимания. Выполнение теста «Реакция различения» характеризуется умеренно-сильным дестабилизирующим влиянием, требующим достаточного расхода когнитивных ресурсов, что конфликтует с контролем ходьбы. Проба «Реакция на движущийся объект» является относительно самой сложной задачей, вызывает наибольшее дестабилизирующее влияние и требует от испытуемого высоких уровней проявления предвосхищения и точности.
При низкой скорости ходьбы условия реализации «двойной задачи» грубо корректирует паттерн ходьбы. При средней скорости ходьбы система произвольной регуляции движений адаптируется и демонстрирует оптимальные компенсаторные стратегии; ходьба на сравнительно высокой скорости перегружает функциональную систему, что проявляется в комплексном снижении всех параметров постурального баланса и повышении риска падения.
Перспективы тематического направления данного исследования, на наш взгляд, открываются в изучении реактивности организма испытуемого в условиях многозадачности при ходьбе с измененными пространственновременными характеристиками локомоции, в частности с применением опции «обратной связи». Ранее показано, что добавление, например, вибротактильной обратной связи улучшило время выполнения хватательных движений в парадигме двойной задачи [8]. Пользователи протезов могут использовать эффект обратной связи для повышения эффективности выполнения повседневных задач, когда предъявляются множественные когнитивные требования. При этом необходимым условием является персонифициро- ванный подход абилитации (реабилитации) лиц с ампутациями, выраженный в учете как объективных «сложностей» (уровень ампутации [11] или конструкции и способа крепления протеза [5]), так и индивидуальных психологических особенностей (преимущественно мотивационно-волевой сферы).
