Особенности работы электродинамического молота

Автор: Шестаков Иван Яковлевич, Фисенко Елена Николаевна, Ремизов Игорь Анатольевич
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 2 (54), 2014 года.
Бесплатный доступ
Рассматривается способ работы молота, приводом которого является линейный электродинамический двигатель. Рассмотрена связь импульса тока в обмотке возбуждения ротора с энергией удара. При статическом режиме работы электродинамического молота в обмотку катушки-статора и в обмотку возбуждения ротора подают токи, величина которых достаточна для втягивания ротора в статор и удерживания его в верхнем положении. Затем в обмотку возбуждения подают импульс тока для обеспечения рабочего хода ротора. Направление импульса тока в обмотке возбуждения противоположно направлению тока в статическом режиме. Длительность импульса тока меньше, чем время перемагничивания магнитопровода статора, но превышает длительность рабочего хода ротора. Приведены результаты испытаний электродинамических молотов.
Электродинамический молот, импульс тока, время перемагничивания, магнитопровод, ротор
Короткий адрес: https://sciup.org/148177257
IDR: 148177257 | УДК: 658.14+621.975
Work features of electrodynamic hammer
The article discusses a hammer operation technique, the drive of which is a linear electrodynamic motor. The relationship between the current pulse in the rotor field winding with impact energy is studied. In static mode of the electrodynamic hammer the currents are fed to coil winding and the rotor field winding, the current magnitude is sufficient to draw the rotor into the stator and keeping it in the upper position. Then current pulse is fed to the rotor field winding to provide the rotor stroke. The direction of the current pulse is the opposite to the current direction in the static mode. Current pulse duration is shorter than it takes to reverse magnetization of the stator magnetic core, but it exceeds the duration of the rotor stroke. The results of tests of electrodynamic hammers are presented.
Текст научной статьи Особенности работы электродинамического молота
В радиопромышленности, приборостроении широко применяется холодная штамповка. Это объясняется тем, что детали, изготавливаемые из листового материала, можно получить сложной конфигурации, высокой точности, стабильных размеров при высокой производительности.
Для холодной штамповки в основном используются кузнечно-прессовые машины (КПМ), в которых вращательное движение преобразуется в возвратнопоступательное перемещение. Применение линейных электродинамических двигателей в КПМ позволит непосредственно преобразовать электроэнергию в кинетическую прямолинейного движения инструмента, что существенно упрощает привод машин, повышает надежность, производительность листовой штамповки. Однако широкого применения линейные электродинамические двигатели в КПМ не получили из-за недостаточности научно-исследовательских и опытно-конструкторских работ в этой области. В данной статье рассматривается способ работы молота, приводом которого является линейный электродинамический двигатель. Это позволило повысить энергию удара и КПД преобразования электрической энергии в механическую с 70 до 81 %.
Энергия удара инструмента пропорциональна квадрату скорости движущихся масс в момент удара. Эта скорость может быть определена следующим образом:
-
V = a · τ, (1)
где V – скорость в момент удара; а – ускорение движущихся масс (масса бабы + масса ротора + масса инструмента); τ – время рабочего хода, т. е. время движения инструмента от верхнего положения до момента удара о заготовку.
Ускорение приближенно можно определить как а = F/m, (2)
где F – электромагнитная сила, действующая в рабочем зазоре катушки-статора на обмотку возбуждения ротора; m – величина движущихся масс.
Электромагнитная сила определяется по известному закону
F = B· I ·l , (3) где В – магнитная индукция в рабочем зазоре; I – ток в обмотке возбуждения ротора; l – длина проводника, находящегося в рабочем зазоре.
Магнитная индукция в рабочем зазоре определяется как
В = f (F ст ± F р ) , (4)
где f – функция зависимости магнитной индукции от магнитодвижущей силы; F ст – магнитодвижущая сила от обмотки катушки-статора; F р – магнитодвижущая сила от обмотки возбуждения ротора. Магнитодвижущая сила – величина векторная, поэтому при совпадении направлений векторов магнитная индукция максимальная. Направление магнитодвижущей силы определяется направлением тока в обмотке, поэтому при одинаковом направлении токов в обмотках ротора и статора магнитодвижущие силы складываются (знак «+» в формуле (4)). Это происходит в статическом режиме работы молота, значит магнитная индукция в рабочем зазоре максимальная. В режиме рабочего хода направление тока в обмотке возбуждения меняется на противоположное. В этот же момент должно начинаться перемагничивание магнитопровода статора. Из-за инерционности магнитных диполей материала статора перемагничивание начинается через определенный промежуток времени. Установлено экспериментально, что этот промежуток времени для литого массивного магнитопровода составляет 100–150 мс. Поэтому длительность импульса тока должна быть меньше, чем время перемагничивания, так как в течение этого времени магнитная индукция в рабочем зазоре максимальна, значит, и развиваемая электромагнитная сила максимальная, стало быть, энергия удара повышенная.
Из выражений (1) и (2) видно, что конечная скорость V определяется временем действия ускорения а и электромагнитной силы F . Для получения максимальной скорости движущихся масс необходимо, чтобы время действия силы F (а значит, длительность импульса тока I ) было больше, чем длительность рабочего хода ротора. При этом энергия удара повышенная по сравнению с тем, когда длительность импульса тока в обмотке возбуждения меньше, чем время рабочего хода ротора.
На рис. 1 изображен электродинамический привод молота, состоящий из обмотки-катушки статора 1 , обмотки возбуждения ротора 2 , ротора 3 , блока управления БУ , магнитопровода 4 ; 0-0 – положение обрабатываемой поверхности.
На рис. 2–4 изображено изменение магнитной индукции В , тока в обмотке возбуждения I , перемещение ротора х в зависимости от времени при различной длительности импульса тока τит, рабочего хода τрх и перемагничивания τп.
Управление работой электродинамического молота осуществляют следующим образом: в статическом режиме от блока управления БУ подают ток Iк в обмотку катушки-статора 1 и ток Iо в обмотку возбуждения 2 ротора 3. Величину токов подбирают достаточной для втягивания ротора 3 в статор и удерживания ротора в верхнем положении – статический режим. При этом направление токов Iо, Iк в обмотках 1 и 2 должно быть одинаковое. Это приводит к сложению магнитодвижущих сил от двух обмоток в рабочем зазоре.
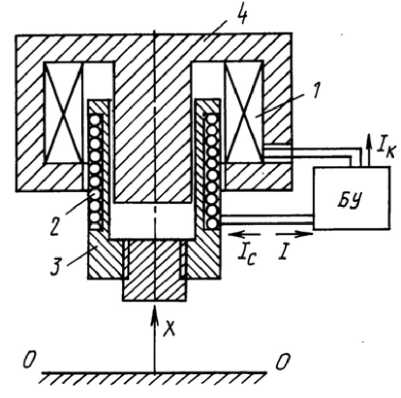
Рис. 1
В режиме рабочего хода в обмотку возбуждения 2 ротора подают импульс тока I , направление которого противоположно току в статическом режиме I о (рис. 2–4).
При длительности импульса тока τ ит большей, чем время перемагничивания τ п , происходит уменьшение магнитной индукции В в рабочем зазоре (рис. 2). Это приводит к снижению энергии удара.
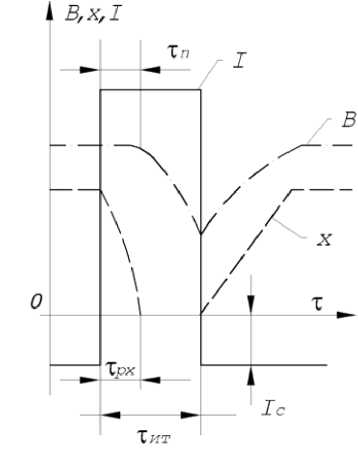
Рис. 2
При длительности импульса тока τ ит меньшей, чем длительность рабочего хода τрх, происходит снижение энергии удара, так как электромагнитная сила F не действует в течение всего рабочего хода (рис. 3).
При длительности импульса тока τит большей, чем время рабочего хода τ рх , и меньшей, чем время перемагничивания τ п (рис. 4), энергия удара будет максимальная.
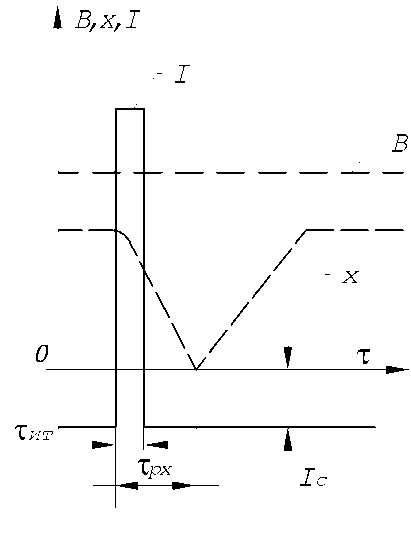
Рис. 3
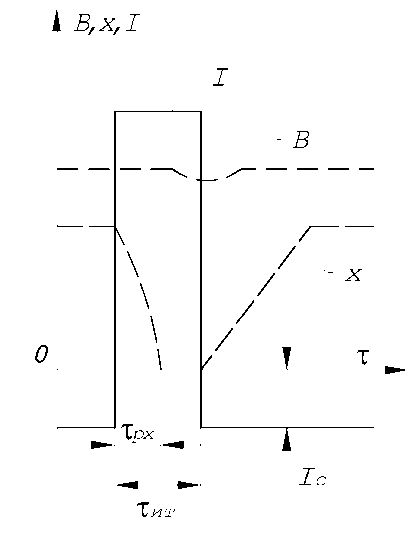
Рис. 4
Результаты испытаний электродинамических молотов
|
Способ работы |
Длительность импульса токов τ ит , мс |
Время рабочего хода τ рх , мс |
Время перемагничивания τп, мс |
Энергия удара, Дж |
КПД, % |
|
Патент 2062168 |
40 |
30 |
120 |
210 |
81 |
|
А. С. 544495 |
150 |
30 |
120 |
185 |
75 |
|
А. С. 544495 |
20 |
34 |
120 |
176 |
74 |
Был изготовлен электродинамический молот с литым магнитопроводом. В таблице приведены результаты испытаний изготовленного электродинамического молота по вышерассмотренному способу работы [1; 2].
Для сравнения приведены данные испытаний электродинамического молота авторов [3]. Электрическая мощность катушки-статора в обоих случаях одинакова – 190 Вт.
Результаты испытаний показали, что КПД предложенной конструкции выше прототипов на 6–7 %. Опытная эксплуатация в промышленных условиях доказала надежность работы подобной конструкции.
