Особые положения технологического оборудования с параллельными приводами рабочего органа

Автор: Сюськина Юлия Львовна
Рубрика: Расчет и конструирование
Статья в выпуске: 33 (166), 2009 года.
Бесплатный доступ
Описан алгоритм определения особых положений механизма с параллельными приводами. Приведены примеры определения особых положений для двух вариантов двухкоординатных исполнительных механизмов с параллельными приводами.
Механизмы с параллельными приводами, особые положения механизмов, якобиан
Короткий адрес: https://sciup.org/147151474
IDR: 147151474 | УДК: 629.114.2
Special regulations of technological equipment with parallel drives of operating element
The algorithm of definition of special regulations of a mechanism with parallel drives is described. The examples of definition of special regulations for two variants of biaxial actuating devices with parallel drives.
Текст научной статьи Особые положения технологического оборудования с параллельными приводами рабочего органа
В современном машиностроении применяется оборудование, рабочий орган которого связан с основанием несколькими кинематическими цепями, часть из которых имеет приводы [4]. Достоинствами такого оборудования являются высокая жесткость и точность перемещений рабочих органов, малая металлоемкость, недостатками - сложность управления, относительно небольшое рабочее пространство и сложная его форма, а также наличие особых положений, при которых координаты входных звеньев становятся зависимыми друг от друга. Одним из критериев особого положения является равенство определителя матрицы Якоби (якобиана) нулю [1,6].
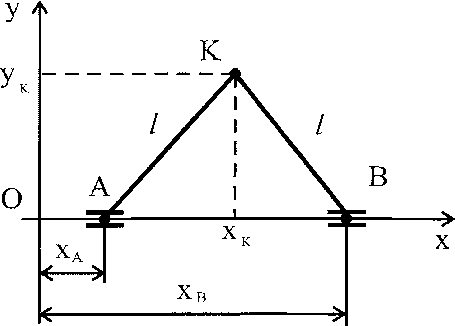
Рис. 1. Кинематическая схема двухкоординатного исполнительного механизма
Определим особые положения двухкоординатного исполнительного механизма с параллельными приводами (рис. 1).
Данный механизм состоит из ползунов А и В, которые перемещаются по оси Ох и соединены пальцем штангами постоянной длины. Примем длины штанг АК и В К одинаковыми и равными I.
При решении прямой задачи геометрического анализа [6] исследуемого механизма функции положения имеют вид:
хк =^(ха+хв);
I —7-----v (1)
v I Хв Хд I Ук р ~ •
Якобиан для системы (1)
5хк дхк дхА дхв дУк дУк дх, дхв
хВ-ха

ХА-ХВ
Из равенства
следует, что в особом положении хА = хв входные звенья А и В находятся в одной точке (рис. 2, а, б). В данном положении механизм теряет управляемость - «сдвоенная» штанга длиной I может занимать произвольное положение, вращаясь вокруг нижнего «сдвоенного шарнира» АВ.
Рис. 2. Особые положения двухкоординатного исполнительного механизма
При решении обратной задачи геометрического анализа исследуемого механизма функции положения таковы:
ХА = ХК хв = хк + Ф “ Ук-
Якобиан для системы (3)
Из равенства
следует, что в особом положении ук = 0 - точки А, В и К находятся на оси Ох (рис. 2, в). В данном положении шарнир К может перемещаться только вдоль прямой, соединяющий шарниры А и В. Координаты хА и хв зависимы.
Итак, особые положения такого механизма:
-
1) центры шарниров А и В находятся в одной точке (рис. 2, а, б);
-
2) точки А, В и К находятся на одной прямой (рис. 2, в).
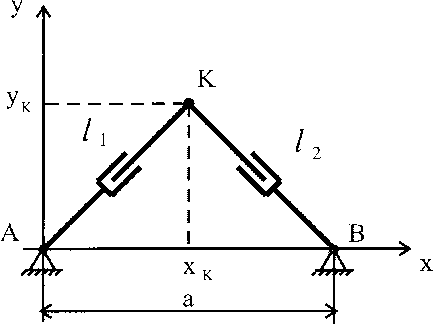
Рис. 3. Кинематическая схема двухкоординатного исполнительного механизма с переменными длинами штанг
В результате расчетов при решении прямой задачи геометрического анализа был найден один вариант особых положений двухкоординатного исполнительного механизма с параллельными приводами, а при решении обратной задачи геометрического анализа -другой вариант. Это связано с тем, что в первом случае входными координатами данного механизма являются координаты ползунов А и В - хА и хв, выходными координатами -координаты шарнира К - хк и ук, а во втором случае - наоборот.
Проведем исследование особых положений другого двухкоординатного исполнительного механизма с параллельной кинематической структурой (рис. 3).
Звено такого механизма - шарнир с центром в точке К соединяется с основанием с помощью двух стержней АК и ВК изменяемой длины /1 и /2. Координаты шарниров А и В примем еле-дующими: хА = 0, уА = 0, хв = а, ув = 0.
При решении прямой задачи геометрического анализа исследуемого механизма функции
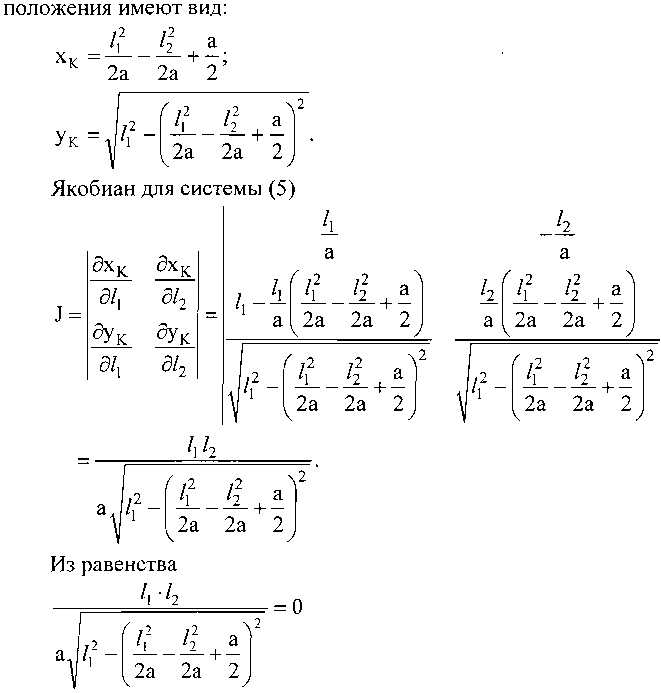
следует, что в особых положениях у исследуемого механизма либо длина штанги АК 7] = 0,72 = а, хк = Ук = 0 (рис. 4, а), либо длина штанги ВК 72 =0,7] = а, хк =а, ук = 0 (рис. 4, б).
При решении обратной задачи геометрического анализа исследуемого механизма функции положения примут вид:
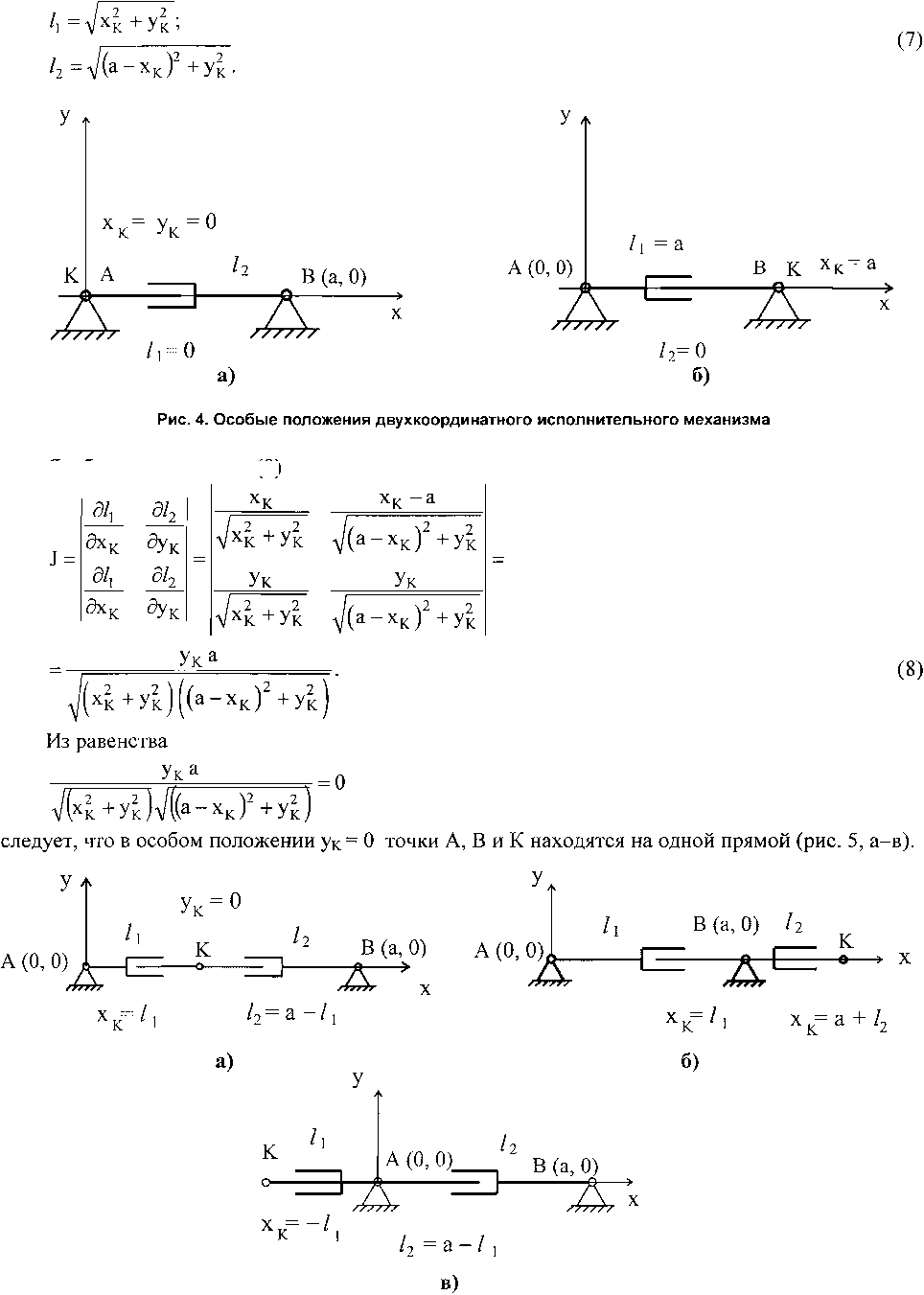
Якобиан для системы (8)
Рис. 5. Особые положения двухкоординатного исполнительного механизма с переменными длинами штанг
В более сложных случаях функции положения определяются в неявном виде [6]. Так, когда переменная у, являющаяся по смыслу задачи функцией аргументов х15х2,...хп, задается посредством функционального уравнения
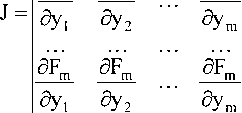
Р(у,х1,х2,...хп) = 0, (9) говорят, что у как функция аргументов х1? х2,...хп задана неявно [2]. Для m функций (при ш = п) Fb F2, ..., Fm можно составить определитель Якоби (якобиан):
дУ1 9У2 дут
9F2 dF2 5F2
Функции положения в неявном виде для двухкоординатного исполнительного механизма с переменными длинами штанг (рис. 3) имеют вид:
Е =х| +ук — А2 =0;
/ V 2 2 <10>
Р2 = (а-хк) + ук -Z2 =0.
При решении прямой задачи геометрического анализа (при задании функции положения в неявном виде) определитель Якоби для системы (10)
дЦ 5^
-2^ 0
0 -2Z2
(H)
9/j 5Z2
dF2 5F2
5Zf dZ2
Приравняв определитель (И) нулю, получим
4/Д2=0. (12)
Чтобы найти координаты, соответствующие особому положению согласно [3], нужно выражение (12) объединить с одним из уравнений системы (10) и найти их совместное решение.
В результате исследований получим следующие варианты особых положений двухкоорди натного исполнительного механизма с параллельными приводами:
-
1) длина штанги АК Л = 0, Z2 = а, хк = ук= 0 (см. рис. 4, а);
-
2) длина штанги В К Z2 =0, 1^ = а, хк =а, ук= 0 (см. рис. 4, б).
При решении обратной задачи геометрического анализа исследуемого механизма определитель Якоби для системы (10) (при задании функции положения в неявном виде) имеет вид
а^ а^
дхк дук
^хк 2ук 2(хк-а)

= 4ук а.
Приравняв определитель (14) нулю, получим
4ука = 0. (14)
Найдем координаты, соответствующие особому положению. Согласно [3] нужно выражение (14) объединить с одним из уравнений системы (10) и найти их совместное решение.
В результате исследований получили следующие варианты особых положений двухкоординатного исполнительного механизма с параллельными приводами: ук=0, хк =± /ь xK=a±Z2, точки А, В и К находятся на одной прямой (см. рис. 5, а-в).
В результате исследований получили особые положения двухкоординатных исполнительных механизмов с параллельными приводами. Как следует из изложенного выше, процесс вычисления является сложным для рассмотренных простейших случаев. Однако для управления такими механизмами необходимо знать их особые положения, так как в этих положениях теряет-
Сюськина Ю.Л. Особые положения технологического оборудованияс параллельными приводами рабочего органа ся управляемость механизмов и имеют место неблагоприятные условия для передачи сил и моментов [1, 4-6].
Поэтому варианты особых положений механизма с параллельными приводами можно найти по следующему алгоритму:
-
1) составить функции положения в явном или неявном виде по кинематической схеме механизма;
-
2) определить якобианы при решении прямой и обратной задач геометрического анализа и приравнять их нулю;
-
3) найти координаты, соответствующие особому положению.
Список литературы Особые положения технологического оборудования с параллельными приводами рабочего органа
- Глазунов В.А. Пространственные механизмы параллельной структуры/В.А. Глазунов, А.Ш. Колискор, А.Р. Крайнев. -М.: Наука, 1991. -95 с.
- Ильин В.А. Основы математического анализа: учебник для вузов: в 2 ч./В.А. Ильин, Э.Г. Позняк. -7-е изд. -М.: ФИЗМАТЛИТ, 2005. -Ч. 1. -648 с.
- Лунев В.В. Особые многообразия плоских и пространственных механизмов с несколькими степенями свободы/В.В. Лунев, С.Ю. Мисюрин//Проблемы машиностроения и надежности машин. -1993. -№ 1. -С. 102-109.
- Механика машин: учебное пособие для втузов/И.И. Вульфсон, М.Л. Ерихов, М.З. Коловский и др.; под ред. Г.А. Смирнова. -М.: Высш. шк., 1996. -511 с.
- Тверской М.М. Станок с параллельными приводами координатных перемещений рабочего органа/М.М. Тверской//Вестник ЮУрГУ. Серия «Машиностроение». -2007. -Вып. 9. -№ 11 (83). -С. 61-66.
- Теория механизмов и машин: учебное пособие для студентов высших учебных заведений/М.З. Коловский, А.Н. Евграфов, Ю.А. Семенов, A.B. Слоущ. -М.: Издательский центр «Академия», 2006. -560 с.
