Отработка методов нечеткого управления шагающим роботом "Ортоног" в полевых условиях

Автор: Брискин Евгений Самуилович, Чернышев Вадим Викторович, Шаронов Николай Геннадьевич, Серов Валерий Анатольевич, Мироненко Константин Борисович, Устинов Сергей Анатольевич
Журнал: Космические аппараты и технологии.
Рубрика: Робототехника и мехатроника
Статья в выпуске: 2 (4), 2013 года.
Бесплатный доступ
Описываются результаты полевых испытаний шагающего робота «Ортоног» адаптивного типа с 20 управляемыми степенями свободы. Проведен сравнительный анализ показателей профильной проходимости и маневренности шагающего робота «Ортоног» и уникального марсохода «Curiosity».
Шагающий робот, управление, проходимость
Короткий адрес: https://sciup.org/14117297
IDR: 14117297 | УДК: 629.36
Field tests of the walking robot "Ortonog"
The results of a field test of the walking robot «Ortonog» adaptive type with a 20-th controlled degrees of freedom are describe. A comparative analysis of the profile and maneuverability walking robot «Ortonog» and unique rover «Curiosity» was also carried out.
Текст научной статьи Отработка методов нечеткого управления шагающим роботом "Ортоног" в полевых условиях
При движении в сложных условиях шагающие машины могут быть более эффективными в сравнении с традиционными колесными и гусеничными. По этой причине разработки таких машин ведутся во всех развитых странах. В частности, известны исследования по созданию шагающих роботов для исследования поверхности планет [1-4].
В ВолгГТУ совместно с ЦКБ «Титан» был разработан ряд опытных образцов шагаю-
-
1 © Брискин Е. С., Чернышев В. В., Шаронов Н. Г., Серов В. А., Мироненко К. Б., Устинов С. А., 2013
щих машин. В частности, были созданы шагающие роботы «Восьминог» и «Восьминог-М» с цикловыми движителями [5; 6], предназначенные для работы в экстремальных условиях. Опыт их практического использования показал, что по грунтовой и профильной проходимости шагающие машины превосходят аналоги с традиционными типами движителей. Последняя разработка коллектива - шагающий робот «Ортоног» со сдвоенными ортогонально-поворотными движителями [7]. Это робот адаптивного типа с 20 управляемыми приводами. Он создан для исследования возможностей программного обеспечения к самостоятельной адаптации. В работе обсуждаются некоторые результаты, полученные при испытаниях робота.

U ИССЛЕДОВАНИЯ Havko- ■ ГРАДА
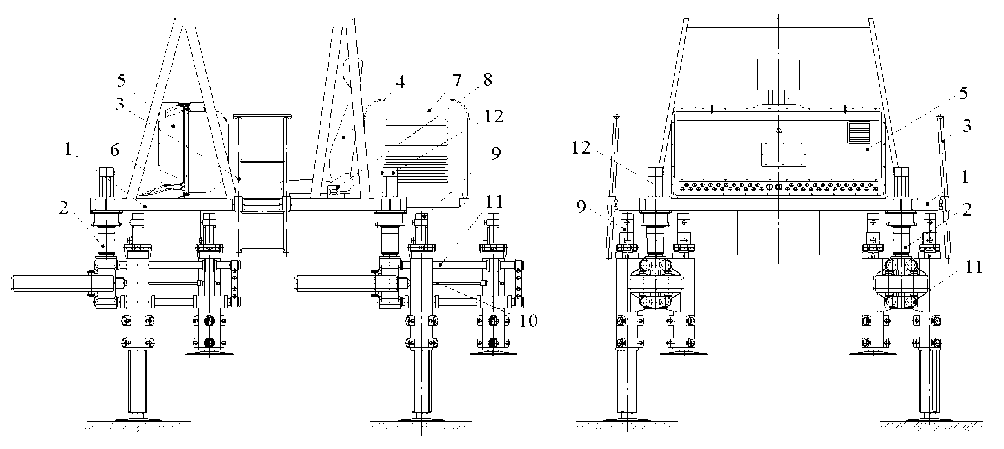
Рис. 1. Конструктивная схема шагающего робота «Ортоног»:
1 – рама; 2 – шагающие движители; 3 – лестница; 4 – кресло оператора; 5 – бункер электрооборудования;
6 – сеть кабельная; 7 – бортовой источник питания; 8 – панель; 9 – механизм вертикальных перемещений; 10 – механизм горизонтальных перемещений; 11 – направляющая; 12 – механизм
поворота
Конструктивно 8-ногий робот «Ортоног» (рис. 1) представляет собой сварную раму, по углам которой размещены шагающие движители. В состав каждого движителя входят по 2 механизма вертикальных и горизонтальных перемещений, механизм поворота и 2 пары направляющих. Механизмы вертикальных перемещений снабжены шариковыми втулками, установленными на паре горизонтальных направляющих, и связаны тягами с механизмами горизонтальных перемещений. Направляющие и механизмы горизонтальных перемещений установлены на вращающейся части механизма поворота. Сами механизмы поворота закреплены на раме. Механизм вертикальных перемещений имеет выдвижной шток с таре-лью, служащей опорой движителя. Привод штока осуществляется от электроцилиндра GSM 30-1802 с ходом 455 мм. Привод горизонтальных перемещений – от электроцилиндра GSM 30-1805 с таким же ходом. Привод механизма поворота – серводвигатель SLG 090-100 со встроенным редуктором, обеспечивающим разворот движителя в диапазоне ±90°. Приводы снабжены датчиками обратной связи и электрическими тормозами. На раме также расположены бензогенератор, бункер электрооборудования и кресло оператора.
Опыт управления роботом в условиях сложной местности показал, что оператор не может эффективно управлять всеми ногами одновременно. Поэтому при управлении использовался следующий подход. Оператор контролирует работу автономно работающей машины по визуальной информации, поступающей с видеосенсоров, и вмешивается в управление лишь при необходимости, например, при преодолении препятствий. Оператор может находиться вне рабочего пространства. Задача управления движением решается без его участия бортовым компьютером. При этом не ставится задача выделения алгоритмами обработки изображений полезной информации в сигналах видеосенсоров для определения характеристик рабочего пространства. Внешние условия задаются как функции положения стоп, по току в приводах перемещений, также использовались датчики углов наклона корпуса (крен и тангаж). В результате система управления не позволяет достоверно определять тип и расположение препятствия – движение осуществляется в условиях некоторой неопределенности и возможны различного рода сбои в управлении, при которых управление передается оператору машины.
При разработке системы согласованного управления ногами использовались методы управления, основанные на нечетком представлении информации и нечеткой логике. Подобные методы позволяют управлять робототехническими системами в реальном времени, используя опыт эксперта-оператора, априори заложенный в систему в форме функций принадлежности и правил нечеткого вывода [8]. Однако при эксплуатации робота в не из-
Отработка методов нечеткого управления шагающим роботом «Ортоног» в полевых условиях вестной заранее обстановке априорные знания могут оказаться неадекватны реальным условиям. При полевых испытаниях проводилась настройка системы нечеткого управления робота в режиме обучения, когда роботом управлял человек-оператор. В условиях неорганизованной местности (рис. 2) был смоделирован ряд наиболее типичных ситуаций, возникающих при движении робота.
Настройка адаптивной системы нечеткого управления производилась путем сопоставления данных о ситуации и о соответствующем управлении. В режиме обучения параллельно с информацией о ситуации, фиксируемой бортовыми и внешними видеокамерами, сохранялась информация об управляющих сигналах, формируемых оператором. Телеметрическая информация, получаемая от сенсорной системы робота, и информация о сигналах управления со стороны человека-оператора синхронно записывалась в файл. Пример листинга лог-файлов программы управления приводами шагающих движителей приведен на рис. 3. После окончания движения производился анализ полученного файла совместно с видеозаписью процесса движения. Это позволяло связать относительные движения ног робота с абсолютным его движением. В файле выделялись области, относящиеся к характерным движениям робота, например, прохождение препятствия. Принцип обучения заключался в итерационном подборе параметров адаптивной системы нечеткого вывода, обеспечивающих наименьшее расхождение между движением автономной системы и системы, управляемой опытным оператором. Полученные настройки системы вывода ориентированы на специфическую ситуацию, то есть на некоторые сочетания входных данных, и пригодны только для данной ситуации. Поэтому возникает задача идентификации ситуации в процессе работы. В дальнейшем для их распознавания планируется использовать методы нечеткой кластеризации. В случае невозможности определения в известной системе ситуации предусмотрен набор гностических движений ног робота, целью которых является получение дополнительной информации о внешнем мире.
После обучения робот в маршевых режимах может двигаться самостоятельно. При специальном маневрировании требуется вмешательство оператора. Автономно реализуются лишь такие режимы, как экстрен-
ная остановка при встрече с препятствием, гностические движения ног для определения его границ, управление положением корпуса при преодолении уклонов и некоторые другие режимы.
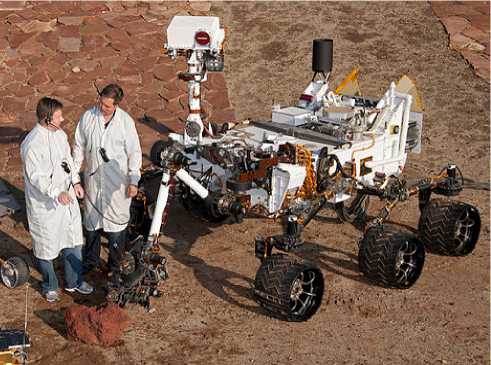
В рамках полевых испытаний также был проведен сравнительный анализ ходовых качеств робота «Ортоног» и марсохода «Curiosity» [9]. Машины имеют приблизительно одинаковые массу и размеры (табл. 1). Анализ показал, что по параметром проходимости и маневренности шагающий робот пре- 45
восходит марсоход с колесным движителем.

Рис. 2. Проведение экспериментов
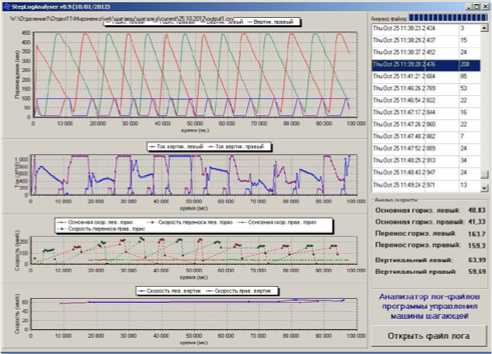
Рис. 3. Пример листинга лог-файлов программы управления приводами
Высокая профильная проходимость шагающей машины обусловлена адаптивностью движителя – ноги требуемым образом перемещаются в пространстве, перешагивая препятствия и приспосабливаясь к опорной поверхности, а также характером взаимодействия шагающего движителя с грунтом.
ИССЛЕДОВАНИЯ
ГРАДА
Таблица 1
Сравнительная характеристика марсохода «Curiosity» и шагающего робота «Ортоног»
Марсоход «Curiosity»

Шагающий робот «Ортоног»
|
«Curiosity» |
«Ортоног» |
|
|
Общетехнические характеристики |
||
|
Габариты (Д×Ш×В), м |
3,1×2,7×2,1 |
3,28×2,17×2,75 |
|
Масса, кг |
900 |
1200 |
|
Грузоподъемность, кг |
80 |
300 |
|
Максимальная скорость, км/ч |
0,144 |
1,656 |
|
Профильная проходимость |
||
|
Размеры движителя, м: диаметр колеса длина шага высота шага |
0,51 – — |
0–0,45 0–0,45 |
|
Максимальный условный клиренс, м |
0,7 |
1,5 |
|
Высота преодолеваемых выступающих препятствий, м |
0,751 |
0,82 |
|
Ширина преодолеваемого рва, м |
менее 0,5 |
0,9 |
|
Предельный угол подъема, град |
32 |
42 |
|
Движение поперек склона: предельный угол, град |
менее 30 |
более 60 |
|
Маневренность |
||
|
Угол поворота движителя, град |
45 |
180 |
|
Минимальный радиус поворота, м |
1,3 |
1,1 |
|
Движение под углом к продольной оси |
не предусмотрено |
под любым углом |
|
Движение боком («крабом») |
не предусмотрено |
возможно |
|
Колея (следовая дорожка) |
сплошная |
дискретная |
|
Адаптация к опорной поверхности |
частичная, за счет подвески |
полная |
Только при движении вперед.
При движении с сохранением горизонтальности рамы – 0,45 м, при наклоне рамы – 0,8 м.
Отработка методов нечеткого управления шагающим роботом «Ортоног» в полевых условиях
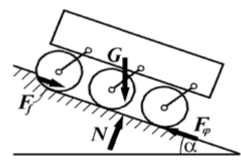
Например, при движении по сыпучим или связным грунтам угол преодолеваемого уклона amax для колесных машин ограничен свойствами грунта и определяется (рис. 4, а) из условия Fф = G sina + Ff, где G - вес машины; N = Gcosa - нормальная реакция грунта; Fф = кфN и Ff = kf N - силы сцепления и сопротивления движению; kφ и kf – коэффициенты сцепления и грунтового сопротивления, соответственно. Для адаптивных шагающих ма- шин угол αmax определяется геометрическими
а
/
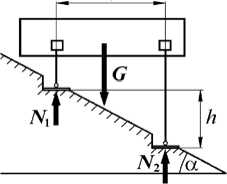
б
Рис. 4. Движение по уклону колесной ( а ) и шагающей ( б ) машины
параметрами движителя (рис. 4, б): расстоянием между ногами l и высотой шага h .
В роботе «Ортоног» за счет возможности реализации разной длины ног при движении также решается проблема поперечной устойчивости на косогоре. Для колесных ма-
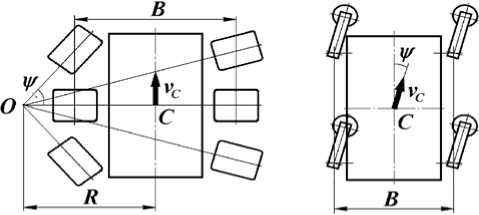
а б
Рис. 5. Схема поворота колесной (а) и шагающей (б) машины шин движение поперек склона не всегда допустимо – при движении с боковым креном возможно опрокидывание или сползание в боковом направлении. Машина при движении с боковым креном будет сохранять устойчивость, если центр давления не выходит за пределы ширины колеи. Достаточно высокая поперечная устойчивость марсохода достигнута за счет снижения клиренса машины и за счет увеличения размера колеи.
Более высокая грунтовая проходимо сть «Ортонога» в сравнении с марсохо- дом «Curiosity» обусловлена большим клиренсом робота, что исключает его посадку днищем на грунт, а также тем обстоятельством, что при шагающем способе передвижения грунт не препятствует движению, а лишь требует необходимых энергозатрат на его прессование.
Наряду с проходимостью степень совершенства планетохода как средства передвижения определяют маневренность и поворотливость. Конструктивно марсоход «Curiosity» выполнен в виде платформы с научным оборудованием на шести колёсах, каждое из которых имеет свой электродвигатель, причём передние и задние два колеса могут участвовать в рулении (рис. 5, а ), что позволяет аппарату разворачиваться с любым радиусом R и на месте (с R = B /2, где B - ширина колеи аппарата). Однако поворот с минимальными радиусами может быть реализован по сцеплению не на всех грунтах и требует значительных энергозатрат из-за скольжения колес по грунту (кинематически точный поворот ограничен углом поворота у управляемых колес). В сравнении с марсоходом, «Ортоног» имеет меньший минимальный радиус поворота, более узкую колею и, соответственно, ему для маневра необходим коридор меньшей ширины. Также, очевидно, ему можно меньше маневрировать – часть препятствий можно перешагнуть. Кроме того, ортогонально-поворотные движители шагающего робота позволяют ему не только поворачивать, но и менять направление движения – за счет синхронного разворота движителей робот может поступательно двигаться под любым углом к продольной оси (рис. 5, б ) и даже боком («крабом»). Причем шагающий движитель, в отличие от колесного, позволяет маневрировать без проскальзывания по грунту и оставляет дискретные следы, а не непрерывную колею.
Таким образом, проведенные полевые испытания показали, что шагающий движитель может эффективно использоваться в мобильных робототехнических системах, предназначенных для работы в экстремальных условиях, в частности в планетоходах, работающих с высокой степенью автономности.
Список литературы Отработка методов нечеткого управления шагающим роботом "Ортоног" в полевых условиях
- Планетоходы/под ред. А. Л. Кемурджиана. М.: Машиностроение, 1993. 400 c.
- Маленков М. И. Мобильные роботы космического назначения//Мобильные роботы и мехатронные системы: докл. науч. шк.конф. М.: МГУ, 1998. C. 68-76.
- Kubota T., Takahashi H. Micro walking robot design for planetary exploration//Climbing and Walking Robots and their Supporting Technologies. CLAWAR 2003: Proc. of the 6th Int. Conf. Catania, Italy, 2003. P. 357364.
- Брискин Е. С., Чернышев В. В. Динамика шагающих машин с движителями на базе цикловых механизмов при ослабленной гравитации//Проблемы машиностроения и надежности машин. 2006. № 1. С. 1520.
- Динамика и управление движением шагающих машин с цикловыми движителями: монография/Е. С. Брискин, В. В. Жога, В. В. Чернышев, А. В. Малолетов; под ред. Е.С. Брискина. М.: Машиностроение, 2009. 191 с.
- On ground and profile practicability of multilegged walking machines/E.S. Briskin, V.V Chernyshev, A.V. Maloletov and others//Climbing and Walking Robots. CLAWAR 2001: Proc. of the 4th Int. Conf. London, 2001. P. 1005-1012.
- Моделирование движения шагающей машины с ортогонально-поворотными движителями/В. А. Шурыгин, В.А. Серов, Н.Г. Шаронов//Изв. ВолгГТУ. 2011. Вып. 11, № 9. C. 41-44.
- Ющенко А. С., Киселев Д. В. Ситуационный подход к организации поведения мобильного робота в условиях неопределенности//Мехатроника. 2000. № 5. С. 10-15.
- Mars Science Laboratory. Curiosity Rover. -http://marsprogram.jpl.nasa.gov/msl/.
