Параметрическая идентификация модели механизма с параллельными кинематическими цепями

Автор: Смирнов Владимир Алексеевич
Рубрика: Расчет и конструирование
Статья в выпуске: 33 (166), 2009 года.
Бесплатный доступ
Показана возможность экспериментального уточнения параметров кинематической модели, описывающей реальный механизм с параллельными кинематическими цепями, используемый при построении технологического оборудования.
Механизм с параллельными кинематическими цепями, идентификация параметров кинематической модели
Короткий адрес: https://sciup.org/147151472
IDR: 147151472 | УДК: 621.865.8
Parametric identification of model of mechanism with parallel transmission routes
The article shows the possibility of experimental specification of kinematic model parameters which describes the real mechanism with parallel transmission routes used at construction of processing equipment.
Текст научной статьи Параметрическая идентификация модели механизма с параллельными кинематическими цепями
Построение технологического оборудования на основе механизмов с параллельными кинематическими цепями (МПКЦ) и управление таким оборудованием предполагает использование кинематических моделей МПКЦ [1, 2]. Идеализированная кинематическая модель МПКЦ не в полной мере будет отражать кинематические свойства построенного на его основе оборудования. В частности, это связано с несоответствием геометрических размеров элементов модели МПКЦ и соответствующих элементов реального оборудования. Следовательно, возникает необходимость в экспериментальном уточнении геометрических параметров модели МПКЦ, т. е. требуется выполнить параметрическую идентификацию модели.
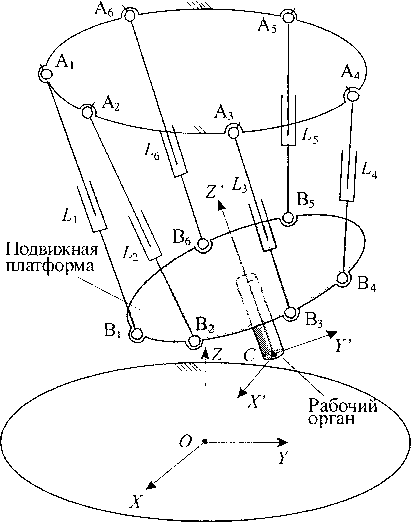
Рассмотрим МПКЦ (рис. 1). Данный механизм включает в себя подвижную платформу, связанную с основанием шестью штангами, имеющими длины Lj , у = 1,6 . Длины штанг могут меняться; примем величины Zy в качестве входных координат МПКЦ. Выходным звеном МПКЦ является подвижная платформа; в качестве выходных координат механизма целесообразно принять величины, определяющие пространственную ориентацию подвижной платформы как твердого тела.
Свяжем с подвижной платформой некоторый рабочий орган. Пространственная ориентация рабочего органа, а значит, и подвижной платформы, определяется тремя линейными координатами некоторой характерной точки (например, точки С ) в связанной с основанием системе координат (СК) OXYZ и тремя угловыми координатами, определяющими разворот осей связанной с рабочим органом СК CX’Y'Z' относительно СК OXYZ.
Рассматриваемый механизм относится к классу гексаподов и имеет шесть степеней подвижности.
Кинематическая модель МПКЦ, показанного на рис. 1, сводится к следующей системе нелинейных уравнений [3]:
L?= ^А, ~ ^Ву - ЧУ By - 4Z\ -^C)2+ C^Ay - "Vfiy -"VBy ""^By -Ус)2+ i
+ (% - "l^By -«2 J^By -»3ZBy "^T Л = Ч 6, где (xA ,yA^, zA ) - координаты карданового шарнира, связывающего/-ю штангу с основанием, в
Расчет и конструирование
СК OXYZ; (Ув^ ,Ув7 ’zb7) “ координаты сферического шарнира, связывающего у-ю штангу с подвижной платформой, в СК CX'Y'Z'; (xc,yc,zc) - координаты характерной точки С в СК OXYZ.
\Xx\X
Рис. 1. МКПЦ, имеющий 6 степеней подвижности
Направляющие косинусы 1к, тк, пк. к = 1,3 , входящие в уравнения (1), определяют разворот осей связанной с рабочим органом СК CX'Y'Z' относительно СК OXYZ. Данные направляющие косинусы целесообразно выразить через три угла, описывающих переход от СК OXYZ к СК CX'Y'Z’ путем последовательных поворотов. В качестве этих углов могут выступать углы Крылова ^ , S, у [4]. В этом случае
Ix = cos у/ cos/ + sinSsin^ sin/ ; Z2 = sin у/ cos 9 ; Z3 = -cos^sin/ + sin^sinScos/ ;
mx-- sin у/ cos / + sin <9 cos ^ sin / ; m2 - cos ^ cos 9 ; m3 = sin у/ sin / + cos у/ sin 9 cos / ; (2)
nx = cos S sin/; n^ = -sinS ; n3 = cos Seos/ и кинематическая модель (1) может быть переписана в следующем виде [3]:
С = А, + У% + ^'в, + Uc -% )2 + (Ус -У^ )2 + <2с -2 к, )2 +
+2^(Сх|/ Су+ S\|/ S3 Sy)x'B^ + 8\|/СЗ^'в^ + (Sx|/S3Cy-C\|/Sy)z'B^ ^хс -хА^ ) +
+2^(С\|/ S3 Sy-Siy Су)*'^ + СхуСЗу^ + (S\|/Sy + Cv|/S3Cy)z'B, ^j^c ) +
+2^C3 Sy%'B,-S3/B, + C3Cyz'B^zc -zAJ,/ = l, 6, где для сокращения записи введены обозначения: S ^ = sin^/, Су/ - cos^ и т. д.
В качестве параметров кинематической модели, требующих уточнения применительно к реальному МПКЦ, лежащему в основе технологического оборудования, выступают:
-
- координаты кардановых шарниров (тА^, yKj ^z^^ j ™V^ в неподвижной СК OXYZ;
-
- координаты сферических шарниров (х’в,, y'Bj, z'B^ ) , у = 1,6 в связанной с подвижной платформой СК CX'Y'Z';
-
- длины штанг L^ , у = 1, 6, соответствующих некоторому произвольному положению подвижной платформы, принятому за начальное (нулевое).
Смирнов В.А. Параметрическая идентификация модели механизмас параллельными кинематическими цепями
Общее количество подлежащих уточнению параметров - 42. Следовательно, определение этих параметров возможно из 42 независимых уравнений.
Точное знание этих величин позволит определять текущие значения входных и выходных координат МПКЦ. Текущие входные координаты определяются через М^, формируемые при управлении оборудованием:
известные приращения
^=^0>+^;
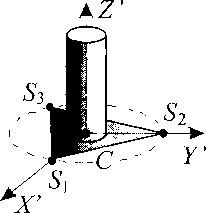
Рис. 2. Метрологическая оснастка
текущие выходные координаты рассчитываются с использованием уравнений (2) - решается прямая задача кинематики о положениях.
Для определения указанных параметров воспользуемся метрологической оснасткой (рис. 2), имеющей элемент крепления к подвижной платформе и тонкую пластину, выполненную в форме равностороннего треугольника. После установки метрологической оснастки на подвижную платформу связанная с оснасткой СК CX'Y’Z' будет полностью определять пространственную ориентацию подвижной платформы.
Пусть МПКЦ находится в начальном (нулевом) состоянии. При этом состоянии механизма могут быть измерены координаты (xs ,ys , zs ), £ = 1,3 вершин Sk треугольной пластины метрологической оснастки, что позволит определить координаты характерной точки С как точки пересечения высот треугольной пластины:
хс = |щ + xs2 + xs3L Ус = ^Щ +У$2 + У$У zc =|(ZS, + zs2+ zs3)- (4)
Так как координаты (Xs^y’s^ z’Sk) точек Sk в СК CX'Y'Z' известны, а пересчет этих координат в СК OXYZ осуществляется с использованием матричного преобразования
Список литературы Параметрическая идентификация модели механизма с параллельными кинематическими цепями
- Смирнов В.А. Математическая модель трехкоординатного манипулятора с параллельной кинематической структурой/В.А. Смирнов, М.М. Тверской//Вестник ЮУрГУ. Серия «Машиностроение». -2005. -Выпуск 7. -№ 14 (54). -С. 19-22.
- Смирнов В.А. Алгоритм управления механизмом с параллельной кинематической структурой/В.А. Смирнов, В.Б. Федоров//Вестник ЮУрГУ. Серия «Машиностроение». -2005. -Выпуск 7. -№ 14 (54). -С. 23-26.
- Сулацкая Е.Ю. Моделирование рабочего пространства станка с параллельной кинематикой/Е.Ю. Сулацкая, Л.Н. Петрова//Вестник ЮУрГУ. Серия «Машиностроение». -2005. -Вып. 13. -№ 11 (144). -С. 42-45.
- Бранец В.Н. Использование кватернионов в задачах ориентации твердого тела/В.Н. Бранец, И.П. Шмыгловский. -М.: Наука, 1973. -320 с.
