Перспективы развития зарядно-разрядных устройств систем электропитания космических аппаратов

Автор: Краснобаев Ю. В.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 1 т.25, 2024 года.
Бесплатный доступ
Система электропитания (СЭП) предназначена для обеспечения бесперебойного автономного электроснабжения бортовой аппаратуры во всех режимах и на всех этапах в течение срока активного существования космического аппарата (КА). Масса СЭП составляет существенную долю массы КА и улучшение удельных энергетических характеристик СЭП приводит к возникновению синергетического эффекта, когда одновременно увеличиваются доступные для полезной нагрузки ресурсы массы и энергопотребления, что повышает эффективность КА в целом. В статье рассмотрена эволюция структурных и схемотехнических решений СЭП КА, её энергопреобразующей аппаратуры и влияние этих изменений на энергомассовые характеристики СЭП. Показано, что значительное влияние на энергомассовые характеристики СЭП оказывают структурные и схемотехнические решения зарядных и разрядных устройств энергопреобразующей аппаратуры и выбор величины напряжения аккумуляторной батареи (АБ). Развитие элементной базы, создание программируемых цифровых устройств, способных функционировать в условиях воздействия факторов космического пространства, и появление современных схемотехнических и управленческих решений для импульсных преобразователей в последнее десятилетие, открывают новые возможности по совершенствованию СЭП КА. В статье в качестве зарядно-разрядного устройства СЭП рассмотрен импульсный преобразователь напряжения (ИПН) с новой стратегией модуляции, обладающий способностью к реверсу потока энергии и возможностью работы в понижающе-повышающем режиме с высоким КПД. Его применение в качестве единого зарядно-разрядного устройства (ЗРУ) позволяет обеспечить значительное улучшение характеристик ЗРУ и СЭП в целом, таких, как КПД, энергомассовые, надёжностные и ряда других. Способность ИПН к реверсу потока энергии и возможность работы в понижающеповышающем режиме открывает возможность отказаться от применения АБ с напряжением, ниже напряжения на основном выходе СЭП, и перейти на использование АБ со средним разрядным с напряжением, близким к напряжению на основном выходе СЭП. Такое структурное и схемотехническое решение ЗРУ и АБ позволит поднять КПД ЗРУ до 99 % и дополнительно улучшить энергомассовые характеристики СЭП.
Система электропитания, аккумуляторная батарея, импульсный преобразователь напряжения, зарядно-разрядное устройство
Короткий адрес: https://sciup.org/148328305
IDR: 148328305 | УДК: 621.314 | DOI: 10.31772/2712-8970-2024-25-1-115-125
Prospects for the development of charger-discharge devices of spacecraft power supply systems
Power supply system (PSS) is designed to ensure uninterrupted autonomous power supply of on-board equipment in all modes and at all stages during the active life of spacecraft. Lots of PSS makes up a significant proportion of the mass spacecraft and improvement of specific energy characteristics PSS this leads to a synergistic effect when the mass and energy consumption resources available for the payload are simultaneously increased, which increases efficiency of spacecraft generally. The article considers the evolution of structural and circuit solutions for PSS spacecraft, its energy- converting equipment and the effect of these changes on energy-mass characteristics PSS. It is shown that a significant effect on energy and mass characteristics PSS provide structural and circuit design solutions for charger and discharge devices of energy-converting equipment and the choice of voltage value accumulator batteries (AB). The development of the element base, the creation of programmable digital devices capable of functioning under the influence of space factors and the emergence of new circuit design and management solutions for pulse converters that have occurred in the last decade opens up new opportunities for improvement of the PSS of spacecraft. In the article as a charger and discharge device PSS reviewed pulse voltage converter (PVC) with a new modulation strategy, with the ability to reverse the flow of energy and the ability to work in a step-up mode with high efficiency. Its application as a single charger-discharge device (CDD) allows for a significant improvement in performance CDD and PSS in general, such as efficiency, energy mass, reliability and a number of others. Ability PVC to reverse the flow of energy and the possibility of working in a step-up mode opens up the possibility to abandon the use of AB with a voltage lower than the voltage at the main output PSS and switch to using AB with an average discharge voltage close to the voltage at the main output PSS. Such a structural and circuit design solution CDD and AB will allow you to increase efficiency of CDD up to 99 % and additionally improve energy and mass characteristics PSS.
Текст научной статьи Перспективы развития зарядно-разрядных устройств систем электропитания космических аппаратов
Системы электропитания (СЭП) космических аппаратов (КА) предназначены для генерации электрической энергии, её хранения и снабжения электрической энергией заданного качества целевых потребителей и служебных систем КА в течение всего срока активного существования (САС) [1]. В современных СЭП КА генерация электрической энергии осуществляется солнечными батареями (СБ), а её хранение – аккумуляторными батареями (АБ). Кроме СБ и АБ в состав СЭП входит энергопреобразующая аппаратура (ЭПА), которая, как правило, состоит из трех устройств – стабилизирующего (СУ), разрядного (РУ) и зарядного (ЗУ). Каждое из перечисленных устройств, по сути, является импульсным преобразователем напряжения (ИПН) или совокупностью параллельно включённых ИПН. Передача энергии от СБ и АБ на выход СЭП и формирование заданного качества электрической энергии обеспечивается СУ и РУ, соответственно, а ЗУ выполняет функцию заряда АБ [2; 3]. При применении в СУ шунтового принципа регулирования, её ЗУ, обеспечивая заряд АБ, также может использоваться и для стабилизации напряжения на выходе СЭП [3]. Тип устройства, которое в текущий момент времени обеспечи- вает стабилизация выходного напряжения СЭП, зависит от соотношения мощности, генерируемой СБ, и мощности, потребляемой нагрузкой, а также от степени заряженности АБ.
На первом КА – первом спутнике Земли – в качестве источника энергии использовался химический источник тока. Необходимость увеличения САС космических аппаратов потребовало включения в состав их СЭП солнечной и аккумуляторной батарей. В систему электропитания СБ и АБ объединялись по структурной схеме, приведённой на рис. 1.
В состав такой СЭП, кроме СБ и АБ, входит блок контроля источников питания (БКИП) и силовой ключ (СК). В этой СЭП управление режимом её работы осуществляется БКИП и сводится к включению и выключению СК, коммутирующего СБ к АБ, и нагрузке (Н1). По существу БКИП исключает перезаряд АБ и обеспечивает своевременное начало её заряда. Достоинством такой СЭП является простота, а недостатками – низкое качество напряжения U вых на выходе СЭП, большое количество циклов заряд-разряд АБ, снижающее ресурс её работы и, как следствие, САС КА. Кроме того, в такой СЭП происходит недоиспользование энергии СБ по причине того, что напряжение на СБ, определяемое напряжением на АБ, изменяется в широком диапазоне в процессе заряда АБ и не соответствует напряжению в точке максимальной мощности СБ [2; 3].
Необходимость устранения вышеперечисленных недостатков привела к созданию в 70-х гг. прошлого века ЭПА, в состав которой входят СН, ЗУ и РУ, выполненные на основе ИПН, обеспечивающих стабилизацию напряжения на выходе СЭП [2; 3]. В СЭП КА применялись различные структурные схемы объединения СН, ЗУ и РУ в единую систему – ЭПА [2–4], однако наиболее широкое применение получили структурные схемы СЭП, приведённые на рис. 2 и 3. В СЭП, приведённой на рис. 2, использован СН, выполненный на основе ИПН последовательного типа (СН ПТ).
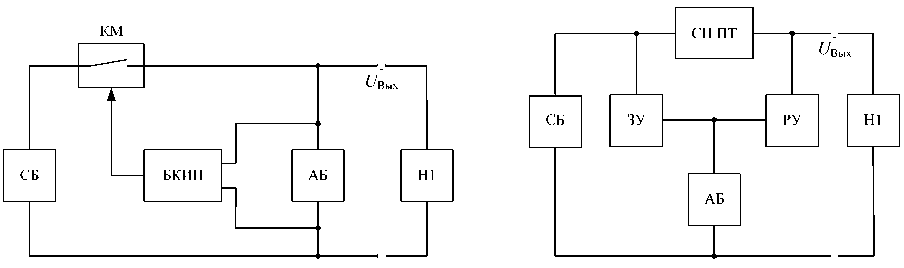
Рис. 1. Структурная схема СЭП с БКИП
Fig. 1. Structure diagram of PSS with PSCU
Рис. 2. Структурная схема СЭП с СН ПТ
Fig. 2. Structure diagram of PSS with SVS
В СЭП, приведённых на рис. 3, а и б , использован СН, выполненный на основе ИПН шунтового типа (СН ШТ). В СЭП, приведённой на рис. 3, а , использован СН ШТ с балластным резистором Rб, который посредством транзистора VT периодически подключается параллельно выходу СЭП, стабилизирую напряжение на выходе СЭП. В СЭП, приведённой на рис. 3, б , использован СН ШТ, выполненный по так называемой схеме S3R. В этом СН ШТ транзистор VT периодически закорачивает СБ, отключая её от выхода СЭП и тем самым стабилизируя напряжение на выходе СЭП. Дроссель L используется для ограничения скорости нарастания и амплитуды тока через транзистор VT, связанный с разрядом паразитной ёмкости СБ. При больших величинах индуктивности дросселя L, СН ШТ может выполнять дополнительную функцию по обеспечению отбора максимальной мощности от СБ, т. е. работать как экстремальный регулятор мощности СБ.
В современных СЭП КА для увеличения их мощности, надёжности работы и САС широко применяется использование нескольких солнечных и аккумуляторных батарей с соответст- вующим увеличением числа СН, ЗУ и РУ. При этом структурное решение таких СЭП близко к СЭП, приведённым на рис. 2 и 3, б, и отличается только наращиванием количества СБ, АБ, СН, ЗУ и РУ, подключенных к выходу СЭП аналогичным образом. Мощность и надёжность СН, ЗУ и РУ в современных СЭП увеличивается за счёт параллельного включения импульсных преобразователей напряжения [3; 6].
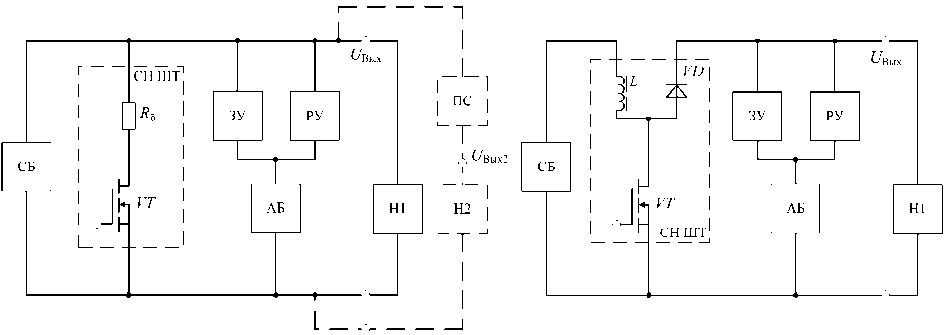
б
Рис. 3. Структурные схемы СЭП с СН ШТ: а – с балластным резистором; б – схема S3R
Fig. 3. Structural diagrams of PSS with STVS: а – with ballast resistor; b – scheme S3R
За почти полувековой период СЭП КА и их ЭПА существенно изменились. Это произошло за счёт успешного решения научных и инженерных задач по совершенствованию схемотехники устройств ЭПА, появления более совершенной элементной базы, разработки и внедрения новых типов солнечных и аккумуляторных батарей. В основном эти изменения привели к существенному росту напряжения на выходе СЭП и напряжения на аккумуляторных батареях СЭП. Так, в мощных СЭП типовое значение напряжения на выходе СЭП составляет 100 В, а максимальное напряжение на АБ находится в диапазоне 92–96 В. Соответствующим образом увеличилось и напряжение на СБ. Это позволило снизить токи в кабельной сети и устройствах СЭП, тем самым увеличив КПД устройств и их энергомассовые характеристики [3; 6]. Структурные схемы СЭП с последовательным и шунтовым стабилизаторами, имеющие свои достоинства и недостатки, продолжают конкурировать и находят свои области предпочтительного применения [7].
Постановка задачи
В статье основное внимание уделяется этапам развития схемотехники зарядного и разрядного устройств, которые неразрывно связаны с изменением уровней напряжения на АБ и выходе СЭП. Затем на основе выявленной тенденции развития и с учётом развития элементной базы и схемотехники ИПН обосновываются шаги по дальнейшему совершенствованию зарядного и разрядного устройств СЭП КА и рациональному выбору напряжения АБ.
Этапы развития систем электропитания
В СЭП повышенной мощности в 70-х гг. прошлого века произошёл переход от СЭП с БКИП, где выходное напряжение соответствовало напряжению на АБ и было нестабильным, к СЭП со стабилизируемым выходным напряжением. При этом в первых таких СЭП среднее разрядное напряжение на АБ составляло 27 В, т. е. соответствовало среднему разрядному напряжению на АБ в СЭП с БКИП. Такой подход был применён в СЭП с блоками автоматики и стабилизации 17МО14 и 17МО26 [2], в которых СН, ЗУ и РУ были включены согласно структурной схеме, приведённой на рис. 2. Выходное напряжение в таких СЭП стабилизировалось на уровне 27 В, но при этом максимальное напряжение на АБ составляло 43 В, а минимальное – 24 В. Такое соотношение напряжений потребовало от разработчиков выполнить ЗУ и РУ в виде последовательно включённых импульсных преобразователей понижающего и повышающего типов. Как следствие, такие ЗУ и РУ имели КПД на уровне 0,85 и низкие энергомассовые характеристики [2].
Повысить КПД и улучшить энергомассовые характеристики ЗУ и РУ удалось за счёт согласования напряжений на выходе СЭП и на АБ таким образом, чтобы максимальное напряжение на АБ было меньше напряжения на выходе СЭП, равного 27 В. Такой подход был применён в СЭП с комплексом автоматики и стабилизации 92Г6 [2], в котором ЗУ было выполнено по схеме импульсного преобразователя понижающего типа, а РУ – по схеме импульсного преобразователя повышающего типа. Это позволило увеличить КПД ЗУ и РУ до уровня в 0,92 и улучшить их энергомассовые характеристики [2].
В целях дальнейшего повышения КПД энергопреобразования в середине 80-х гг. прошлого века было проведено увеличение напряжения на АБ таким образом, чтобы минимальное напряжение на ней превышало напряжение на выходе СЭП. Это позволило применить РУ понижающего типа, а ЗУ – повышающего типа. При этом за счёт повышения напряжения на АБ удалось снизить токи в силовых цепях импульсных преобразователей и увеличить их КПД. Так, в комплексах автоматики и стабилизации 17М122 КПД ЗУ и РУ достиг уровня в 0,92 [2].
Следующий шаг был сделан в конце 90-х гг. 20 в. при создании СЭП для КА SESAT. В этом спутнике связи впервые в отечественной практике СЭП имела два выхода со стабилизируемым напряжением. К первому основному выходу с напряжением U вых равным 40 В подключалась целевая нагрузка спутника – ретрансляторы, а ко второму выходу с напряжением U вых.2 равным 27 В – маломощные служебные системы. Структурная схема СЭП была близка к схеме, приведённой на рис. 3, а . Отличия состояли в том, что в её состав была введены вторая АБ и соответствующие ей ЗУ и РУ, а их силовые цепи были образованы параллельным включением нескольких ИПН. Кроме того, второй выход СЭП, с низким уровнем напряжения U вых.2 был получен за счёт подключения к первому выходу понижающего стабилизатора напряжения (ПС), показанному на рис. 3, а пунктиром. Максимальное напряжение АБ было выбрано менее 40 В, что потребовало применения ЗУ понижающего типа, а РУ – повышающего типа. Учитывая, что ЗУ и РУ выполняют свои функции на разных интервалах времени, разработчики ЭПА КА SESAT в ЗУ и РУ использовали одни и те же дроссели, что позволило снизить массу ЗУ и РУ и, по сути, превратить их в единое зарядно-разрядное устройство (ЗРУ). Снижение массы ЗРУ и увеличение напряжения на основном выходе СЭП, позволившем повысить КПД устройств, привело к значительному повышению энергоэффективности СЭП у КА SESAT [8].
Тенденция по росту напряжения на выходе мощных СЭП КА и по применению в СЭП второго выхода с низким напряжением для питания маломощной служебной нагрузки сохранилась и в 21 в. Так, и в отечественных КА, и в КА зарубежного производства напряжение на основном выходе СЭП стабилизируется на уровне 100 В. Характерным примером является СЭП КА «Глонасс-К2» отечественного производства, а у зарубежных производителей таковыми являются СЭП космических платформ SpaceBus 3000 и SpaceBus 4000 [3; 9]. При этом в этих СЭП используется устоявшаяся концепция выбора максимального напряжения АБ на уровне ниже напряжения на основном выходе СЭП. Как правило, максимальное зарядное напряжение составляет от 92 до 97 В.
Перспективы развития схемотехники зарядно-разрядных устройств
Развитие схемотехнических решений ИПН, законов управления их силовыми транзисторами и применение в ИПН новой элементной базы открывает перед разработчиками ЭПА систем электропитания КА новые возможности. В первом десятилетии 21 в. появились публикации, в которых рассматривается ИПН с новым режимом управления силовыми транзисторами, названный авторами новой стратегией модуляции [10; 11]. Схема силовой цепи этого ИПН приведена на рис. 4. Такой ИПН способен обеспечивать передачу энергии как со входа (сторона 1) на выход (сторона 2), так и обратно, т. е. обеспечивать реверс потока энергии. Кроме того, он обладает возможностью как понижать, так и повышать напряжение при передаче энергии в любую сторону.
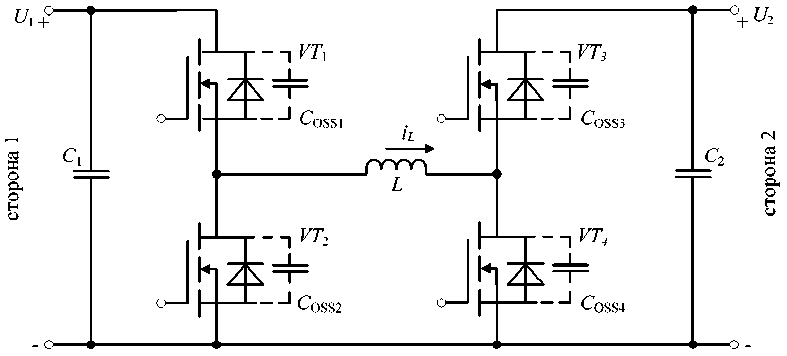
Рис. 4. Схема силовой цепи повышающе-понижающего ИПН с возможностью реверса потока энергии
Fig. 4. Power circuit diagram of a step-up step-down PVS with power flow reversal capability
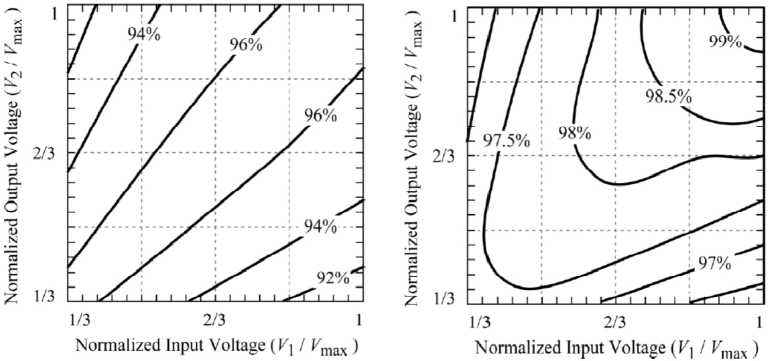
Силовая цепь этого ИПН имеет минимальное количество элементов и симметричную топологию, которая и даёт возможность реверса потока энергии, т. е. позволяет использовать ИПН в качестве единого ЗРУ. Поскольку процессы заряда и разряда АБ разнесены во времени, то силовая цепь ИПН, приведённая на рис. 4, поочерёдно может выполнять функции заряда и разряда АБ, при этом обеспечивая стабилизацию напряжения на выходе СЭП и требуемые режимы заряда АБ. Кроме того, этот ИПН обладает высоким КПД, который в ряде режимов работы превышает уровень 0,99. Высокие значения КПД объясняются тем, что в ИПН отсутствуют динамические потери энергии на транзисторах схемы за счёт их переключения «при нуле напряжения». Стратегия такого переключения транзисторов, предложенная в [10; 11], позволяет сочетать достоинства ИПН с ШИМ и резонансных преобразователей. На интервале коммутации транзисторов устройство управления ИПН формирует специальную управляемую паузу, которая «запускает» колебательный процесс в LC-контуре, образованном индуктивностью дросселя L и паразитными емкостями Сoss силовых транзисторов, что и позволяет переключить транзисторы без динамических потерь в режиме «мягкой коммутации» [10–13]. На рис. 5 приведены номограммы КПД ИПН для двух режимов переключения его транзисторов [10]. Номограммы рис. 5, а получены при переключении транзисторов ИПН с формированием обычно применяемой паузы, называемой «мёртвое время», а на рис. 5, б – при использовании новой стратегии модуляции, предложенной в [10; 11]. По осям координат номограмм приведены отношения текущих значений напряжений на входе U1 (сторона 1) или выходе U2 (сторона 2) к максимальному значению напряжения на стороне Umax. Сравнение номограмм показывает существенный выигрыш по КПД у ИПН с новой стратегии модуляции. Поскольку ИПН, рассмотренные в [10; 11], предназначались для использования в гибридных автомобилях, то номограммы, приведённые на рис. 5, были получены для режимов, характерных для АБ этих объектов, а именно максимальных значений напряжения Umax в 400 В и передаваемой мощности в 50 кВт. С целью проверки возможности достижения высокого КПД у ИПН с более низким уровнем преобразуемого напряжения был изготовлен физический макет ИПН с максимальным значением напряже- ния Umax в 100 В. Испытания макета при напряжениях U1 = 50 В и U2 = 75 В показали КПД равный 0,98, что соответствует номограмме, приведённой на рис. 5, б.
б
а
Рис. 5. Номограммы КПД ИПН при разных способах коммутации ключей: а – с использованием «мертвого времени» при коммутации;
б – с новой стратегией модуляции
Fig. 4. Nomograms of PVS efficience at different methods of key swithing: а – using “dead time” during swithing; b – with a new modulation strategy
К дополнительным ожидаемым преимуществам, которые может дать применение этого ИПН в качестве ЗРУ системы электропитания КА, можно отнести:
– высокие энергомассовые характеристики ЗРУ, поскольку возможность реверса потока энергии даёт возможность исключить из состава ЭПА одно из устройств, ЗУ или РУ, а силовая цепь ИПН содержит малое количество элементов;
– высокие показатели надёжности и низкий уровень генерируемых электромагнитных помех, поскольку переключение транзисторов осуществляется в режиме «мягкой коммутации».
Помимо очевидных преимуществ использования рассматриваемого ИПН в качестве ЗРУ нужно отметить и возможные определённые сложности практической реализации такого технического решения. Новая стратегия модуляции, обеспечивающая ИПН превосходный КПД и возможность реверса потока энергии, связана с необходимостью формирования трёх управляемых моментов переключения силовых транзисторов в течение периода преобразования и регулируемых пауз в окрестности момента переключения. Обеспечение такого сложного управления ИПН возможно только с применением цифровых устройств – микроконтроллеров, цифровых сигнальных процессоров или программируемых логических интегральных схем. Работы по внедрению таких цифровых устройств в ЭПА систем электропитания КА уже активно проводятся [6; 14].
До реализации закона управления силовыми транзисторами ИПН потребовалось осуществить сам синтез закона управления. Для этого был использован приём, основанный на адекватном переходе от системы с ШИМ к системе с амплитудно-импульсной модуляцией (АИМ), синтезе закона управления ИПН с использованием хорошо разработанной теории систем с АИМ и обратном переходе к системе с ШИМ [15; 16], ранее апробированный при синтезе закона управления устройствами ЭПА спутника связи SESAT. Синтезированный закон управления для ИПН, работающем в режиме РУ, был проверен с использованием его компьютерной модели и физического макета с микроконтроллерным управлением [17]. Временные диаграммы, иллюстрирующие переходные процессы в ИПН, полученные при компьютерном моделировании, приведены на рис. 6. Частота преобразования в ИПН выбрана равной 50 кГц, ёмкость конденсатора выходного фильтра равна 500 мкФ, а его внутреннее активное сопротивление равно 0,006 Ом. Напряжение на АБ (сторона 1) принято равным 65 В, а на выходе ИПН (сторона 2) – 100 В. На временных диаграммах (сверху вниз) показаны: напряжение UВЫХ на выходе ИПН; ток iL дросселя ИПН; ток iН нагрузки.
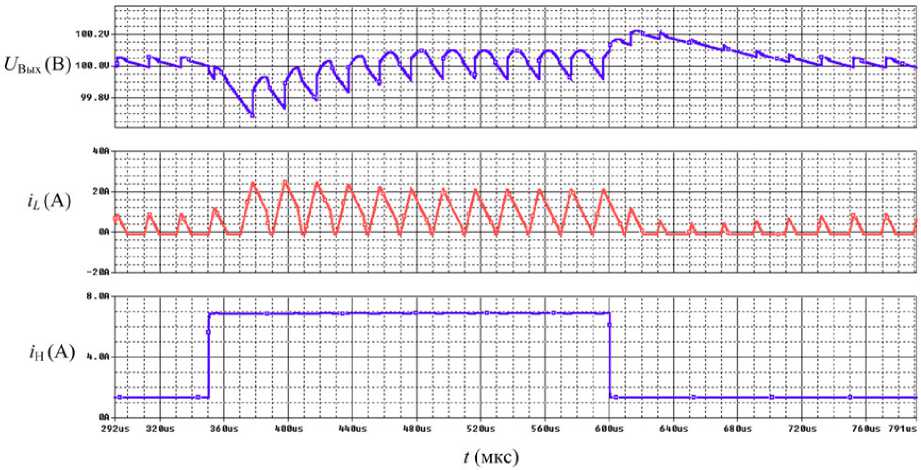
Рис. 6. Временные диаграммы, иллюстрирующие переходные процессы в ИПН
Fig. 6. Time diagrams illustrating PVC transients
Из анализа временных диаграмм следует, что новый установившийся режим наступает через 100 мкс и отсутствует статическая ошибка стабилизации напряжения.
Синтезирован и проверен закон управления для ИПН, работающем в режиме ЗУ [18]. Успешно решаются и задачи по параллельной работе нескольких ИПН. Полученные решения находятся на стадии патентования.
Ещё одним важным свойством, которым обладает рассматриваемый ИПН, является его возможность работать в режимах повышения и понижения напряжения. Следовательно в СЭП с ЗРУ, выполненным на основе рассматриваемого ИПН, может быть применена АБ со средним разрядным напряжением около 100 В, максимальным напряжением в 125–135 В и минимальным напряжением в 65–70 В. Такой режим работы АБ, когда напряжение на ней может быть как выше, так и ниже напряжения ранее использовался в блоках автоматики и стабилизации 17МО14 и 17МО26 и приводил к низким КПД и энергомассовым характеристикам ЭПА КА по причине двойного преобразования энергии как в ЗУ, так и в РУ [2; 3]. Однако при применении рассматриваемого ИПН в качестве ЗРУ следует ожидать обратного результата, а именно увеличения КПД до значения близкого к 0,99. Это следует из номограммы, приведённой на рис. 5, б , поскольку при напряжении на АБ около 100 В КПД ИПН будет определяться графиком, расположенным в правом верхнем углу номограммы.
Заключение
Проведённый анализ эволюционного пути изменения параметров аккумуляторных батарей и топологий зарядных и разрядных устройств систем электропитания выявил наличие сложившегося подхода к выбору напряжения аккумуляторной батареи ниже уровня выходного напряжения системы электропитания.
Сделанные в последние годы достижения в части новых схемотехнических и управленческих решений для импульсных преобразователей, появление цифровых устройств – микроконтроллеров, цифровых сигнальных процессоров или программируемых логических интеграль- ных схем, способных функционировать в условиях воздействия факторов космического пространства, открывает перспективы применения импульсного преобразователя напряжения с новой стратегией модуляции. Этот импульсный преобразователь позволяет обеспечить значительное улучшение характеристик зарядно-разрядного устройства системы электропитания, таких как КПД, энергомассовые, надёжностные и ряда других, обеспечиваемых цифровым устройством управления.
Отказ от применения аккумуляторных батарей с напряжением ниже напряжения на выходе системы электропитания и переход на аккумуляторные батареи со средним разрядным напряжением, близким к выходному напряжению СЭП, т. е. с увеличенным на 25–30 % от достигнутого уровня, позволит дополнительно поднять КПД преобразования энергии посредством предлагаемого импульсного преобразователя до значений близких к 99 % и дополнительно улучшить энергомассовые характеристики систем электропитания.
Список литературы Перспективы развития зарядно-разрядных устройств систем электропитания космических аппаратов
- Mukund R. Patel Spacecraft power systems. Florida: CRC Press, 2005. 691 p.
- Системы электропитания космических аппаратов / Б. П. Соустин, В. И. Иванчура, А. И. Чернышев, Ш. Н. Исляев. Новосибирск: Наука. Сибирская издательская фирма, 1994. 318 с.
- Козлов Р. В. Оптимизация энергомассовых характеристик системы электропитания геостационарного космического аппарата: дис. … канд. техн. наук. Томск, 2021. 183 с.
- Краснобаев, Ю. В., Кудряшов В. С., Чубарь А. В. Сравнительный анализ топологий систем электропитания космических аппаратов // Информатика и системы управления: сб. науч. тр. Красноярск: ГУ НИИ ИПУ, 2002. Вып. 8. С. 34–41.
- Bouhours G., Asplanato R. Power Subsystem for 20 kW Telecommunication Satellites // Proceedings of the Fifth European Space Power Conference (ESPC). Tarragona, Spain, 21–25 September 1998. Organised by European Space Agency.
- Кабиров В. А. Энергопреобразующий комплекс с резервированной цифровой системой управления для высоковольтных систем электропитания космических аппаратов: дис. … канд. техн. наук. Томск, 2023. 209 с.
- Поляков С. А. Выбор режима работы солнечных батарей систем электропитания космических аппаратов // Электронные и электромеханические системы и устройства: тез. докл. 27 НТК. Томск: «НПЦ «Полюс». 2006. С. 8–11.
- Юдинцев А. Г. Энергопреобразующие комплексы для наземной отработки и подтверждения прогнозируемой надёжности систем электропитания космических аппаратов // Доклады ТУСУР. 2019. Т. 22, № 3. С. 95–102.
- A power conditioning unit for high power GEO satellites based on the sequential switching shunt series regulator / A. Garrigos, J. A. Carrasco, J. M. Blanes, Sanchis-Kilders // MELECON. 2006. IEEE Mediterranean Electrotechnical Conference. Malaga, Spain, 2006. P. 1186–1189. Doi: 10.1109/MELCON.2006.1653313.
- Waffler S., Kolar J. W. A novel low-loss modulation strategy for high-power bidirectional buck + boost converters // IEEE Transactions on Power Electronics. 2009. Vol. 24, No. 6. P. 1589–1599.
- Waffler S., Kolar J. W. Efficiency Optimization of an Automotive Multi-Phase Bi-directional DC-DC Converter. Wuhan (China): Proceedings of the 6th IEEE International Power Electronics and Motion Control Conference. 2009. P. 566–572.
- Краснобаев, Ю. В., Захаров В. В., Карнаухов М. А. Анализ электромагнитных процессов в повышающе-понижающем преобразователе с возможностью реверса потока энергии и повышенным коэффициентом полезного действия // Вестник СибГАУ. 2014. Том 455, № 3. С. 100–107.
- Применение реверсивного повышающе-понижающего преобразователя а качестве зарядо-разрядного устройства в автономной системе электропитания / Ю. В. Краснобаев, О. В. Непомнящий, И. Е. Сазонов и др. // Радиотехника. 2023. Т. 87, № 8. С. 155–161.
- Определение характеристик цифровых регуляторов импульсных преобразователей напряжения / А. А. Лопатин, А. А. Дружинин, А. C. Асочаков, А. В. Пучков // Сибирский журнал науки и технологий. 2020. Т. 21, № 3. С. 409–416. Doi: 10.31772/2587-6066- 2020-21-3-409-416.
- Краснобаев Ю. В. Методология синтеза законов и структур устройств управления конверторами // Изв. вузов. Приборостроение. 2004. Т. 47, № 4. С. 39–48.
- Краснобаев Ю. В. Развитие метода синтеза быстродействующих импульсных стабилизаторов напряжения // Изв. вузов. Приборостроение. 2004. Т. 54, № 11. С. 61–68.
- Патент № 2764783 C1 Российская Федерация, МПК H02M 7/53862. Способ управления импульсным стабилизатором напряжения / О. В. Непомнящий, Ю. В. Краснобаев, А. П. Яблонский, И. Е. Сазонов ; заявитель и патентообладатель СФУ. – № 2021118448 ; заявл. 23.06.2021 ; опубл. 21.01.2022, Бюл. № 3.
- Патент № 2813604 C1 Российская Федерация, МПК H02J 7/34. Способ управления зарядным устройством с импульсным принципом действия / Ю. В. Краснобаев, О. В. Непомнящий, И. Е. Сазонов, А. П. Яблонский ; заявитель и патентообладатель СФУ. – № 2023229522 ; заявл. 24.07.2023 ; опубл. 13.02.2024, Бюл. № 5.
