Пилотное исследование возможностей использования инерциальной системы захвата движений для решения задач в протезировании нижних конечностей

Автор: Коростовская Д.А., Шашкина Т.П., Экшарова С.А., Сердюков В.С.
Журнал: Российский журнал биомеханики @journal-biomech
Статья в выпуске: 2 т.30, 2026 года.
Бесплатный доступ
Целью данного исследования являлась демонстрация возможностей коммерческой инерциальной системы захвата движений для решения задач протезирования нижних конечностей – от объективного мониторинга реабилитации пациентов до сравнительного анализа различных протезов и оптимизации их настроек. В рамках клинического эксперимента кинематика походки ампутантов регистрировалась с помощью инерциальной системы захвата движений Perception Neuron 3, содержащей 17 инерциальных датчиков, в различных ситуациях: на начальном и заключительном этапах реабилитации, при использовании разных моделей протезных стоп и при изменении пространственной ориентации протеза стопы. Полученные результаты показали статистически значимое улучшение всех основных параметров походки после курса реабилитации. У обоих пациентов отмечено существенное увеличение скорости и темпа ходьбы и длины шага при сокращении длительности шага, а также приближение угловых характеристик суставов к нормативным значениям, что объективно свидетельствует об эффективности реабилитации. При сравнении двух современных моделей протезов стоп (Ossur Pro-Flex XC и Freedom Agilix) интегральные показатели походки не различались значимо, однако кинематический анализ выявил более физиологичный паттерн движений с протезом Ossur, обеспечивающий большую симметричность походки, совпадающую с субъективными предпочтениями пользователя. Эксперимент по изменению конфигурации протеза подтвердил высокую чувствительность метода: при экстремальной настройке (избыточном подошвенном сгибании) скорость ходьбы снизилась примерно на 40 %, возникла выраженная хромота и асимметрия движений, тогда как малые корректировки ориентации не вызывали значимых изменений интегральных параметров. Сделан вывод, что система Perception Neuron 3 обеспечивает достоверную количественную оценку кинематики походки как в лабораторных, так и в приближенных к реальным условиям. Показана целесообразность использования инерциальной системы захвата движений для объективного контроля эффективности реабилитации и функциональных характеристик протезов нижних конечностей, что повышает качество подбора и настройки протеза и способствует профилактике вторичных осложнений.
Биомеханика, кинематика походки, анализ походки, инерционный измерительный прибор, ампутация нижних конечностей, протезирование, протезирование стопы
Короткий адрес: https://sciup.org/146283371
IDR: 146283371 | УДК: 531/534: [57+61] | DOI: 10.15593/RZhBiomeh/2026.2.10
Pilot study of the potential application of an inertial motion capture system for addressing challenges in lower-limb prosthetics
This study aimed to demonstrate the utility of an inertial motion capture system for addressing key challenges in lower-limb prosthetics, including the objective monitor-ing of rehabilitation progress, comparative analysis of prostheses models, and opti-mization of prosthesis alignment. Gait kinematics were recorded from amputee par-ticipants using a 17-sensors based Perception Neuron 3 system across various condi-tions: initial and final rehabilitation stages, use of different prosthetic feet (Össur Pro-Flex XC and Freedom Agilix), and systematic alteration of prosthetic alignment. Results indicated a statistically significant improvement in key gait parameters fol-lowing rehabilitation, including increased walking speed, cadence, and step length, alongside a normalization of joint kinematics toward normative values. While com-parative analysis of the two prosthetic feet revealed no significant differences in spa-tio-temporal parameters, kinematic data demonstrated that the Össur prosthesis pro-moted a more symmetrical and physiological gait pattern, correlating with the user's subjective preference. Experiments modifying prosthetic alignment confirmed the method's high sensitivity; an excessively plantarflexed configuration induced a 40% reduction in walking speed and pronounced limping, whereas minor adjustments did not significantly alter integral gait parameters. The study concludes that the PN3 sys-tem provides a reliable, quantitative tool for assessing gait kinematics in both labora-tory and near-natural environments. The implementation of IMU-based analysis facil-itates objective rehabilitation monitoring and prosthetic functional evaluation, thereby enhancing the processes of prosthesis prescription, alignment, and the prevention of secondary complications.
Текст научной статьи Пилотное исследование возможностей использования инерциальной системы захвата движений для решения задач в протезировании нижних конечностей
Надежная количественная оценка походки у людей с ампутациями нижних конечностей критически важна для подбора и тонкой настройки протезов, раннего выявления рисков падений и травм, оценки симметрии, стабильности, а также мониторинга реабилитации ампутанта в клинике и дома. Стоит отметить, что качество и эффективность протезирования во многом зависят не только от клинической (состояние культи, объем движений, мышечная сила и т.д.) [1], но и от биомеханической (анализ походки) оценки реабилитации ампутантов [2– 5], что верно и для других заболеваний и нарушений опорно-двигательного аппарата [6–9]. Более того, клинической оценки реабилитации зачастую недостаточно для избежания неправильной постановки протеза и ее последствий для здоровья опорно-двигательного аппарата (ОДА).
На протяжении длительного времени «золотым стандартом» в биомеханических исследованиях походки выступали маркерные оптические системы захвата движения [10; 11]. Их применение обеспечивает высокую пространственную точность, достигающую миллиметровых величин, и превосходное временное разрешение, что позволяет проводить детальный анализ кинематики во всех трех плоскостях движения. Эти системы широко используются в качестве референсного метода для валидации альтернативных технологий захвата движений. Однако их использование связано с рядом ограничений: высокая стоимость оборудования и обслуживания, необходимость лабораторных условий, сложная процедура калибровки, а также чувствительность к перекрытию маркеров особенно во время ходьбы с протезом [12] и к дрейфу датчиков на протезе и теле ампутанта [13]. Кроме того, движение пациента фиксируется только в специально подготовленных условиях, что не отражает его повседневной активности. Данные недостатки оптических систем захвата движений существенно сужают возможности их использования в области оценки эффективности реабилитации ампутантов нижних конечностей [14–15].
Помимо маркерных оптических систем захвата движений существуют и безмаркерные, основанные, в первую очередь, на автоматизированных алгоритмах обработки потокового видео и внедрении ИИ [16; 17]. Такие системы не требуют установки маркеров на тело, что упрощает процесс исследования. Они находят все большее применение в клинической практике и спортивной биомеханике [18; 19]. К недостаткам данного подхода относятся снижение точности по сравнению с маркерными системами, особенно при сложных движениях, перекрытиях сегментов тела или использовании протезных конструкций. Кроме того, эффективность алгоритмов сильно зависит от качества изображения, освещения и используемых моделей реконструкции.
Инерциальная система захвата движений (ИСЗД)
намного компактнее оптических систем и обладают рядом существенных преимуществ. Датчики обладают небольшим размером и состоят из акселерометра, магнитометра и гироскопа. Они позволяют проводить съемку данных кинематики движений человека и широко используются в сфере кино и игр, но также могут найти свое применение в науке [20]. Стоит отметить, что ИСЗД является беспроводной системой, что потенциально расширяет возможности её применения за пределами стандартных лабораторных условий, в том числе для анализа более сложных локомоторных задач, таких как движение по лестнице или по наклонной поверхности. Однако в рамках настоящего исследования данные сценарии не рассматривались и требуют отдельной экспериментальной оценки. Но несмотря на мобильность, низкую стоимость и возможность работы за пределами медицинского кабинета, у ИСЗД существуют недостатки. Смещение датчиков с начальной позиции во время движений [21; 22] и чувствительность к металлоконструкциям [23; 24] снижают точность записи данных, из-за чего часто возникает необходимость повторной калибровки [25] или невозможность проводить исследования в определенных местах. Однако ИСЗД обеспечивают хорошую точность оценки кинематики суставов как у здоровых людей, так и у пользователей протезов [26]. Например, показана валидность ИСЗД при анализе походки пациентов с транстибиальными протезами в сравнении с оптическим захватом движения [27–29]. С помощью ИСЗД можно проводить анализ и оценку походки ампутантов. По данным кинематики походки можно вычислить среднюю скорость и темп ходьбы, время и длину шага [30; 31], а также заметить асимметрию походки или хромоту.
Таким образом, применение ИСЗД в задачах протезирования нижних конечностей представляет собой перспективное направление. Целью настоящей работы являлось исследовать и продемонстрировать на примере клинического исследования возможности коммерчески доступной ИСЗД для решения различных задач протезно-ортопедической отрасли, таких как отслеживание реабилитации, подбор протеза и его настройки.
Методы
Для регистрации кинематических данных использовалась инерциальная система захвата движений Perception Neuron 3 (PN3) [Ошибка! Источник ссылки не найден.]. Данная система состоит из семнадцати беспроводных инерциальных датчиков, каждый из которых закрепляется на определенном сегменте тела и отслеживает его ориентацию в пространстве в реальном времени. Ключевым преимуществом этой платформы является ее высокая точность и минимальная задержка при передаче данных, что достигается за счет применения продвинутых алгоритмов сенсорного слияния. Эти алгоритмы в реальном времени интегрируют показания акселерометров, гироскопов и магнитометров, компенсируя присущий инерциальным системам дрейф [33]. Благодаря этому система находит применение в профессиональных областях, требующих высокой точности, таких как создание анимации персонажей для кино и видеоигр, биомеханический анализ в спортивной и клинической медицине, а также в разработке иммерсивных виртуальных и дополненных реальностей. Важным эксплуатационным достоинством является ее полное отсутствие проводов, что не только обеспечивает испытуемому полную свободу движений, но и значительно ускоряет и упрощает процесс калибровки.
В рамках нашего эксперимента датчики были размещены на ампутантах в соответствии со схемой, представленной на (рис. 1). Перед началом каждой записи серии данных в обязательном порядке проводилась процедура калибровки датчиков в строгом соответствии с инструкцией производителя. Этап калибровки является критически важным для достижения максимально возможной точности сбора кинематических данных. Необходимость этого обусловлена двумя фундаментальными факторами, влияющими на работу любой ИСЗД. Во-первых, точность определения ориентации сильно зависит от стабильности окружающего магнитного поля, так как магнитометры, используемые для компенсации дрейфа гироскопов, крайне чувствительны к магнитным аномалиям и помехам в помещении [34; 23; 24]. Во-вторых, в процессе движения возможно непреднамеренное смещение датчиков относительно тела, вызванное их креплением через одежду или непосредственное скольжение по коже, что вносит дополнительные погрешности в измерения. Процедура калибровки позволяет системе учесть исходные условия и минимизировать влияние этих факторов.
Протокол сбора данных заключался в следующем: испытуемые выполняли прямолинейные проходы по залу, совершая в среднем по десять шагов в одном направлении от начальной до конечной точки, после чего разворачивались и возвращались обратно по той же траектории. Продолжительность каждой отдельной записи не превышала 35 секунд. Выбор такой короткой длительности записи является методически обоснованным, поскольку он считается оптимальным для получения наиболее достоверных данных с помощью инерциальных систем [35; 36]. Ограничение по времени позволяет минимизировать накопление интегральной ошибки, которая неизбежно возрастает в ИСЗД с течением времени, а также снижает вероятность значительных смещений датчиков и изменений в магнитной обстановке за период измерения, что в совокупности обеспечивает высокое качество и надежность регистрируемой кинематической информации.
Согласно анализу различных источников, система PN3 обладает высокой точностью, пригодной для
Голова

Рис. 1. Схема крепления датчиков
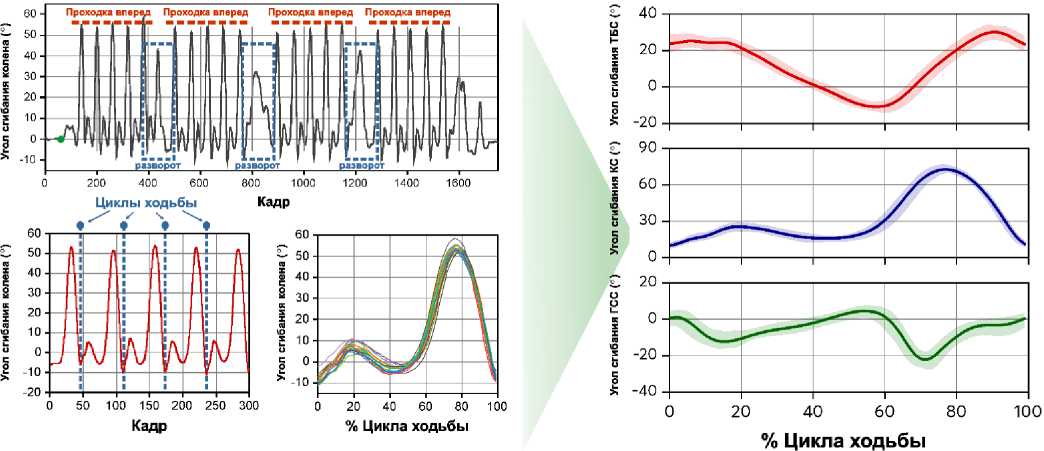
Рис. 2. Схема обработки данных походки ампутантов
исследования кинематики походки. Так, в работах [36– 38] была исследована погрешность данных системы относительно маркерной системы видеозахвата данных VICON . Во время ходьбы величина RMSE не превышала 5°, во время бега – 8°. При этом у голеностопа RMSE достигло 22°, что сильно больше, чем у остальных суставов. Такие погрешности соответствуют действительности, поскольку они проявлялись во время записи экспериментальных данных. Также параллельно с этим велась видеофиксация походки для дополнительной валидации данных ИСЗД и для фиксации замечаний пациентов.
Производитель PN 3 заявляет, что погрешность записи данных зависит от положения, в котором производятся съемки данных [39]. В статическом положении погрешность достигает 0,5 градусов при поворотах и 1,5 градуса при наклонах, в динамическом – 0,5 и 2 градуса соответственно. Также производитель заявляет, что данные снимаются с частотой 600 Гц и передаются с частотой 60 Гц. Задержка по времени составляет менее 20 мс, поэтому можно считать погрешность передачи данных по времени несущественной.
Во всех проводимых экспериментах данные о походке испытуемых записывались с трехкратным повторением для обеспечения высокой точности и достоверности конечных результатов. Каждый такой массив данных включал в себя информацию об углах поворота соответствующих сегментов тела в трех анатомических плоскостях – сагиттальной, фронтальной и горизонтальной, а также координаты центра масс тела в пространстве. Однако для целей данного исследования фокус анализа был сосредоточен на углах сгибания и разгибания в сагиттальной плоскости для трех основных суставов нижних конечностей: тазобедренного (ТБС), коленного (КС) и голеностопного (ГСС).
Методика обработки полученных в эксперименте данных схематически представлена на (рис. 2). Исходный материал для анализа формировался из четырех прямолинейных проходок, выполняемых ампутантом вперёд и назад по прямой линии, что в сумме давало для каждого испытуемого обширный массив кинематической информации. Из каждой прямой проходки выделялись циклы походки путем нахождения локальных минимумов / максимумов в массиве данных сгибания/разгибания КС. После этого с помощью задания диапазонов экстремумов всех циклов проводилась их фильтрация. Таким образом, при обработке отсекались фрагменты прохода, соответствующие развороту ампутанта. Затем проводилось усреднение данных – определялось покоординатное среднее значение между всеми найденными циклами. Итогом обработки данных является массив данных по эволюции углов сгибания/разгибания ТБС, КС и ГСС.
В рамках данного исследовательского проекта осуществляется сравнительный анализ экспериментально полученных данных с установленным нормативным стандартом. В качестве референтного (эталонного) стандарта был избран ГОСТ Р 53871-2021 «Протезы нижних конечностей. Методы оценки реабилитационной эффективности протезирования» [40].
Проведенный анализ литературы и нормативнотехнической документации показал, что в настоящее время не существует широко принятых зарубежных стандартов, непосредственно посвященных оценке реабилитации пациентов после ампутации нижних
Таблица 1
Сравнение общих биомеханических показателей походки пациентов в начале и в конце реабилитации
|
Пациент |
Этап реабилитации |
Скорость ходьбы, м/с |
Темп, шаг/мин |
Длительность двойного шага, с |
Длина двойного шага, м |
|
№ 1 (ТТА) |
начало |
0,42 |
79 |
1,5 |
0,64 |
|
конец (с костылями) |
0,54 |
83 |
1,42 |
0,76 |
|
|
конец (без костылей) |
0,58 |
85 |
1,4 |
0,82 |
|
|
№ 2 (ТФА) |
начало |
0,41 |
63 |
1,9 |
0,78 |
|
конец |
0,61 |
71 |
1,68 |
1,02 |
конечностей, которые бы комплексно и в явном виде включали в себя раздел по биомеханическому анализу движений пациентов. Многие международные руководства и протоколы фокусируются на общих клинических исходах, функциональных тестах (например, тест «встань и иди», 6-минутная ходьба) и оценке качества жизни, в то время как детальная количественная биомеханика походки, как правило, остается предметом научных исследований, а не регламентированной стандартизированной процедуры.
В этом контексте выбранный российский ГОСТ Р 53871–2021 представляет собой уникальный документ, который формализует и делает обязательным использование объективных биомеханических методов, таких как стабилография и гониометрия, для оценки эффективности протезирования. Это позволяет перевести процесс реабилитации и оценку его результатов из области субъективных заключений в плоскость измеримой и воспроизводимой науки.
В ГОСТ описан клинический и биомеханический метод оценки реабилитации. Клинический метод оценки основан на оценке степени активности человека при пользовании протезом по статико-динамическим показателям. Оцениваются преимущественно возможности человека устойчиво сохранять определенные позиции и совершать некоторые базово необходимые действия, такие как ходьба, устойчивость, способность подниматься по лестнице, садиться и пр. Также в клиническом методе описываются требования безопасности и методика оценивания клинических показателей.
В биомеханическом методе описаны основные и временные биомеханические параметры, а также кинематические и динамические показатели походки. К основным параметрам относятся средняя скорость и темп ходьбы, длина и время шага. Временными параметрами являются время фазы опоры и переноса, фазы двойной опоры, сдвиг и коэффициент ритмичности ходьбы. Помимо перечня параметров приводятся требования безопасности, описание методики оценки и примеры графиков углов сгибания ТБС, КС и ГСС у пациентов с транстибиальной ампутацией (ТТА) и трансфеморальной ампутацией (ТФА) в сравнении со здоровыми людьми. В ГОСТ не указаны типы протезов стоп, на которых проводились исследования и для которые построены примеры графиков.
Здесь стоит отметить, что для построения данных в описанном выше ГОСТ были использованы гониометрические датчики. Тем не менее, использование ИСЗД для записи движения и сбора данных об углах сгибания/разгибания суставов является также точным инструментом. Систематическая погрешность, вносимая использованием инерционной системы, не оказывает существенного влияния на основные результаты исследования, а именно на динамику изменений углов в тазобедренном, коленном и голеностопном суставах в течение реабилитационного периода. Следовательно, получаемые данные сохраняют высокую степень достоверности для решения поставленных в работе задач.
Результаты
В исследовании приняли участие два пациента мужского пола с различными уровнями ампутации нижних конечностей, полученными в результате физических травм при несении военной службы. Пациент № 1 (32 года, рост 185 см, масса 95 кг) перенес транстибиальную ампутацию; длина его остаточной культи составила 24 см при длине интактной голени 43 см. Пациент № 2 (49 лет, рост 182 см, масса 80 кг) с сопутствующей гипертонической болезнью 2 степени перенес трансфеморальную ампутацию; длина остаточной культи составила 42 см при длине интактного бедра 43 см. Оба пациента на момент начала исследования находились на начальном этапе реабилитации и были способны к передвижению только с использованием костылей.
Для анализа кинематики ходьбы производилась запись данных походки как с применением костылей, так и без них – в тех случаях, когда пациенты субъективно оценивали свою возможность передвижения как комфортную и устойчивую. В рамках каждого сеанса регистрировалось 3–4 массива данных, что обеспечивало последующее выделение и усреднение циклов походки для повышения достоверности. Основными анализируемыми кинематическими параметрами выступили углы сгибания / разгибания в суставах: тазобедренном, коленном и голеностопном. Дополнительно, для расчета общих биомеханических показателей, использовались данные о траектории перемещения общего центра масс тела в пространстве.
Протокол исследования включал два сеанса съемки. Первичный сбор данных был проведен спустя 48 часов после первичной постановки протезов, до начала активной фазы реабилитации. Второй сеанс проводился после 10 дней реабилитационных мероприятий. Отметим, что стандартный общий срок реабилитации для данной категории пациентов составляет как правило
14 дней и включает обучение самостоятельной ходьбе. К моменту второго сеанса Пациент № 1 продемонстрировал способность к передвижению как с дополнительной опорой, так и без нее, в связи с чем для него были записаны массивы данных, отражающие оба варианта локомоции.
Результаты по углам общим биомеханическим параметрам, а также углам сгибания суставов нижних конечностей сопоставлялись с ГОСТ. В табл. 1 представлена динамика основных биомеханических показателей походки (скорость, темп, длительность и длина шага) у пациентов на начальном и конечном
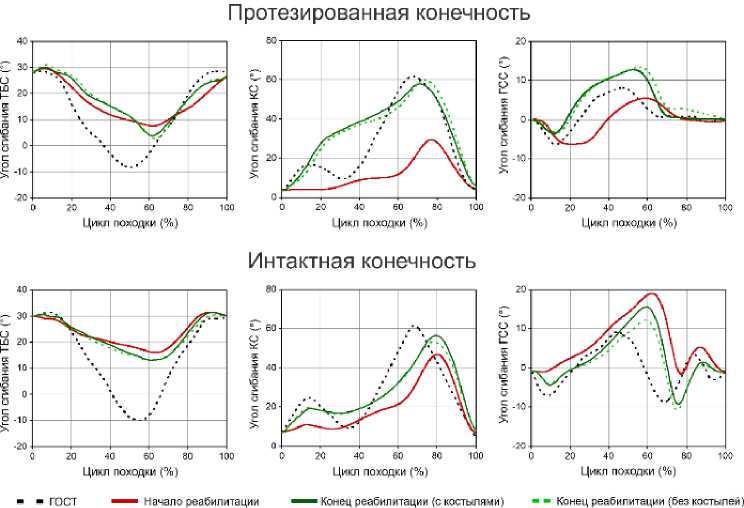
Рис. 3. Кинематика углов сгибания ТБС, КС и ГСС пациента №1 в начале и конце окончание реабилитации. На графике черной пунктирной линией обозначены данные ГОСТ; красной – данные ходьбы пациента в начале реабилитации; темно-зеленой – в конце реабилитации с костылями; светло-зеленой пунктирной – в конце реабилитации без костылей
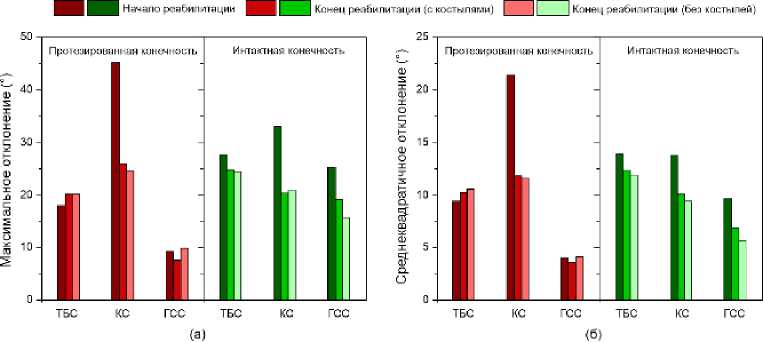
Рис. 4. Сравнительный анализ отклонений кинематических параметров походки пациента № 1 от нормативных значений (ГОСТ) на разных этапах реабилитации: а) максимальное отклонение; б) среднеквадратичное отклонение ( RMSE ) для углов сгибания ТБС, КС и ГСС
этапах реабилитации. Анализ данных выявил статистически значимую положительную динамику по всем исследуемым параметрам у обоих испытуемых. Наблюдалось существенное увеличение комфортной скорости ходьбы, темпа и длины шага, сопровождающееся сокращением длительности одиночного шага.
Как было отмечено ранее, на начальном этапе реабилитации пациенты были способны к передвижению исключительно с использованием двух костылей. Процесс записи данных в этот период сопровождался субъективным дискомфортом, обусловленным быстрым наступлением утомления и болевого синдрома, что ограничивало продолжительность ходьбы.
К окончанию реабилитационного цикла была зафиксирована не только объективная биомеханическая положительная динамика, но и значительное улучшение субъективного состояния пациентов. Пациент № 1 продемонстрировал способность к самостоятельному передвижению без дополнительной опоры или с использованием одного костыля, отмечая высокий уровень комфорта. Пациент № 2 также перешел на использование одного костыля вместо двух, что свидетельствует о повышении стабильности и уверенности при ходьбе.
На (рис. 3) представлена сравнительная динамика углов сгибания суставов нижних конечностей пациента № 1, зарегистрированная на различных этапах реабилитационного процесса.
Анализ данных, полученных на начальном этапе реабилитации, выявил значительное отклонение кинематики от нормативных значений, регламентированных ГОСТ. Наиболее выраженные нарушения наблюдались в паттерне сгибания КС на стороне ампутации и тазобедренного сустава на интактной стороне. Зафиксированная кинематическая картина соответствует типичной компенсаторной стратегии передвижения с преимущественной опорой на интактную конечность. Это подтверждается асимметрией временных параметров шага, а именно – увеличением фазы опоры и периода двойной опоры на интактной ноге по сравнению с ампутированной. Кроме того, было отмечено резкое снижение амплитуды движений в коленном суставе протезированной конечности, что визуально проявлялось в отсутствии активного сгибания КС во время переноса ноги. Данные инструментальных измерений полностью согласуются с материалами видеофиксации.
Повторная оценка, проведенная по окончании реабилитации, демонстрирует положительную динамику. Кинематические кривые сгибания КС и ГСС обеих конечностей приблизились к нормативным значениям. Наименьшее расхождение с ГОСТ наблюдается в углах сгибания ГСС, где экспериментальные и референсные кривые практически совпадают. Амплитуда сгибания КС на обеих ногах достигла пределов референсного коридора, хотя сохраняющийся дефицит активного сгибания указывает на необходимость дальнейшей тренировки. Несмотря на выраженное улучшение биомеханических показателей, анализ углов тазобедренного сустава и общий паттерн ходьбы свидетельствуют о сохранении незначительной хромоты.
Количественная оценка динамики кинематических параметров, представленная на гистограммах (рис. 4), подтверждает положительную тенденцию реабилитации. Зафиксировано существенное сокращение расхождений с нормативными значениями максимальных углов сгибания в КС: для оперированной конечности отклонение уменьшилось на 20°, для интактной – на 12–13°, что в совокупности свидетельствует о почти двукратном снижении асимметрии. Данная динамика объективно свидетельствует о значительном прогрессе в восстановлении биомеханического паттерна ходьбы.
Также статистически значимым является уменьшение расхождения угла сгибания ГСС интактной конечности на 6–10°. Коррекция данного параметра имеет важное клиническое значение, поскольку увеличение амплитуды работы стопы в сочетании с нормализацией временных параметров опоры способствует снижению пиковой нагрузки на интактную конечность. В результате формируется более сбалансированный и симметричный паттерн ходьбы, что является ключевой целью реабилитации, направленной на профилактику вторичных ортопедических осложнений.
У пациента № 2 также зафиксирована выраженная положительная динамика кинематических параметров походки. Как видно на (рис. 5), к концу реабилитационного периода кривые углов сгибания суставов демонстрируют заметное приближение к нормативным значениям ГОСТ. Количественная оценка этой динамики, представленная на (рис. 6), подтверждает общую тенденцию к снижению отклонений. Анализ максимальных отклонений (рис. 6, а ) выявил значительное улучшение показателей. Так, максимальное отклонение угла сгибания ТБС протезированной конечности сократилось на 20°, а интактной – на 15°. В коленных суставах также наблюдается положительная динамика с уменьшением отклонений на 14° и 9° для протезированной и интактной конечности соответственно.
Что касается кинематики голеностопного сустава, то значимых изменений зафиксировано не было. Важно отметить, что паттерн движения протезированной стопы принципиально может отличаться от биомеханической нормы вследствие иного конструктивного типа протезного модуля. Отсутствие в рассматриваемом
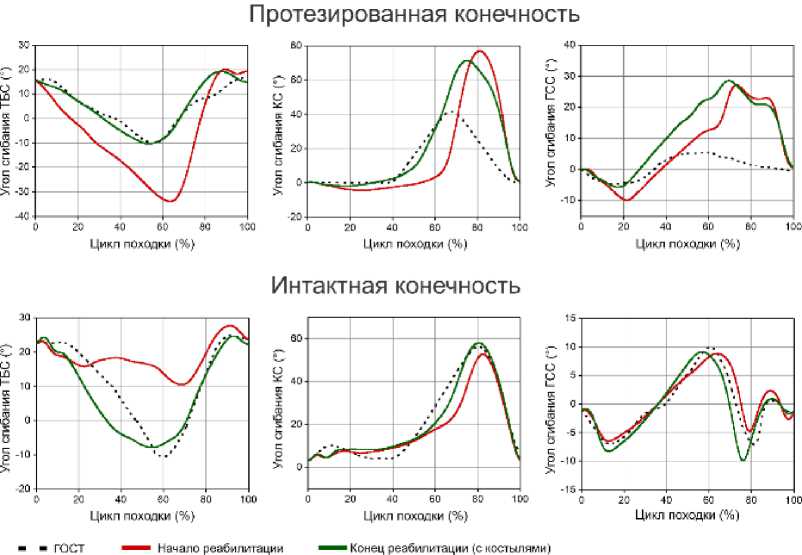
Рис. 5. Кинематика углов сгибания ТБС, КС и ГСС пациента № 2 в начале и конце реабилитации. На графике пунктирной линией обозначены данные ГОСТ; красной – данные ходьбы пациента в начале реабилитации;
зеленой – в конце реабилитации
| Начало реабилитации Конец реабилитации
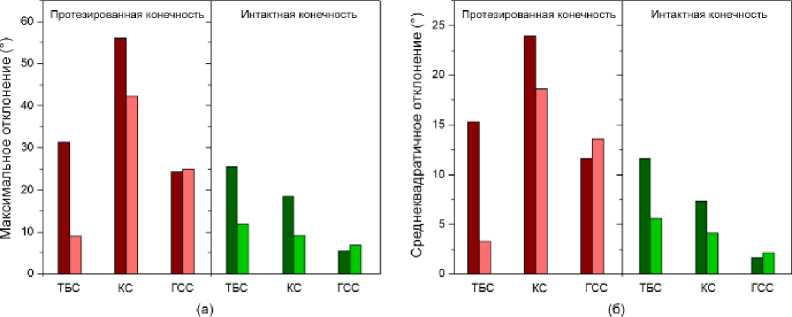
Рис. 6. Сравнительный анализ отклонений кинематических параметров походки пациента № 2 от нормативных значений (ГОСТ) на разных этапах реабилитации: а – максимальное отклонение; б – среднеквадратическая ошибка ( RMSE ) для углов сгибания ТБС, КС и ГСС
ГОСТ спецификаций, учитывающих класс активности и тип протезной стопы, не позволяет провести объективную оценку улучшений в данном сегменте. Кинематика интактной голени изначально демонстрировала незначительные отклонения от нормы, в связи с чем существенной динамики в этом параметре не ожидалось.
Объективным подтверждением общего улучшения кинематики служит синхронное снижение среднеквадратической ошибки RMSE, (рис. 6, б), которое коррелирует с уменьшением максимальных отклонений, что указывает на повышение точности воспроизведения всего паттерна ходьбы в целом, а не только его экстремальных точек.
В исследовании принял участие мужчина в возрасте 40 лет (рост 180 см, масса тела 88 кг) с приобретенной транстибиальной ампутацией левой конечности. Длина культи составляла 23 см, длина интактной голени – 41 см. На момент проведения эксперимента испытуемый являлся опытным пользователем протеза, имея стаж хождения более 6,5 лет, ведя активный образ жизни и

Рис. 7. Модели протезов стоп, использовавшихся в эксперименте
Таблица 2
Сравнение общих биомеханических показателей походки ампутанта с ТТА с различными протезами стопы
|
Протез |
Скорость ходьбы, м/с |
Темп, шаг/мин |
Длительность двойного шага, с |
Длина двойного шага, м |
|
Ossur Pro-Flex XC |
0,80 |
70 |
1,70 |
1,36 |
|
Freedom Agilix |
0,86 |
75 |
1,58 |
1,36 |
участвуя в кибератлетических соревнованиях. Пациент не предъявлял жалоб на трудности при передвижении и не имел диагностированных сопутствующих заболеваний со стороны опорно-двигательного аппарата, что позволяет классифицировать его как пользователя с высоким уровнем мобильности (K4) [41].
Для сравнительного анализа были выбраны два протеза стопы (рис. 7), используемых пациентом: Ossur Pro-Flex XC [42] и Freedom Agilix [43]. Оба протеза имели размер 27 и значения жесткости 5 и 6, соответственно. В соответствии с общепринятой классификацией [44], оба протезных модуля относятся к третьему классу активности, что предусматривает возможность их использования для активной повседневной жизни и занятий спортом.
В табл. 2 представлены общие биомеханические показатели походки на протезах, взятых для эксперимента. Сравнительный анализ не выявил статистически значимых различий в общих биомеханических параметрах между двумя протезами. Наблюдаемые несущественные колебания таких показателей, как скорость ходьбы, темп и длина шага, не отражают принципиальной разницы в функциональных характеристиках протезов. Указанные расхождения, вероятно, носят случайный характер и могут быть объяснены естественной вариабельностью спонтанной скорости передвижения, поскольку оба протезных модуля субъективно оценивались испытуемым как комфортные для ходьбы. Полученные результаты позволяют сделать вывод о том, что общие биомеханические показатели походки, такие как пространственно-временные параметры, не являются достаточно чувствительными для дифференциальной оценки функционального преимущества различных протезов, идентичных по размеру, высоте установки, классу активности и жесткости. Для выявления различий требуется применение методов, позволяющих анализировать непосредственно динамику суставов и распределение нагрузок.
Анализ усредненных данных походки, представленных на (рис. 8), выявил наличие незначительных различий в общей кинематике пациента при использовании двух типов протезов, за исключением кинематических параметров, непосредственно характеризующих сами протезные устройства. Данные различия обусловлены конструктивными особенностями протезов (рис. 7).
Протезы Ossur Pro-Flex XC и Freedom Agilix демонстрируют ряд сходных конструктивных черт. Обе стопы достаточно высокие и гибкие. Данное свойство обеспечивает приближение кинематики протеза к кинематике интактной стопы в фазе опоры. Однако в фазе переноса протезная стопа возвращается в исходное состояние, не воспроизводя свойственного биологической стопе разгибания. Отсутствие приближения к физиологической кинематике на данном этапе является клинически оправданным, поскольку энергии, аккумулированной протезом в фазе опоры, достаточно для эффективного отталкивания и выполнения шага.
Сравнительный анализ показал, что протез Ossur ProFlex XC обеспечивает движение, в большей степени приближенное к кинематике интактной конечности. Углы сгибания данного протеза стопы демонстрируют меньшее отклонение от углов сгибания интактной стопы по сравнению с аналогичными параметрами протеза Freedom , что свидетельствует о более высокой симметричности походки при его использовании. Данное объективное заключение коррелирует с субъективной оценкой пациента, который, несмотря на удобство использования обоих протезов, отмечает преимущественное применение протеза Ossur .
Таким образом, применение ИСЗД позволяет выявить статистически значимые различия в кинематических паттернах при использовании различных моделей протезов, даже в условиях субъективного комфорта пациента. Кроме того, данный метод обеспечивает объективную количественную оценку симметричности походки, что является ключевым параметром при клинической оценке эффективности протезирования.
В рамках исследования влияния регулировочных параметров протеза стопы на биомеханические характеристики ходьбы пользователя осуществлялась модификация положения протеза в сагиттальной и фронтальной плоскостях [45]. Данная процедура выполнялась посредством изменения степени затяжки крепежных болтов, фиксирующих протез на пилоне через пирамидальный адаптер [46]. На (рис. 9) представлены направления регулировки, соответствующие коррекции положения протеза в указанных плоскостях. Под термином «оборот» в настоящей работе подразумевается цикл затяжки или ослабления крепежных элементов, производимый исключительно в рамках одной плоскости.
В качестве основных конфигураций были выбраны три режима: базовая настройка (№ 1), смещение на два оборота вовнутрь (№ 2) и на два оборота вниз (№ 3). Базовая настройка соответствует индивидуально подобранному и субъективно комфортному для пользователя положению протеза, при котором им был накоплен значительный опыт передвижения. Выбор указанных конфигураций обусловлен необходимостью визуализации влияния плоскостной коррекции протеза на кинематические параметры ходьбы. Перед каждой сменой режима протез возвращался в исходное
Протезированная конечность
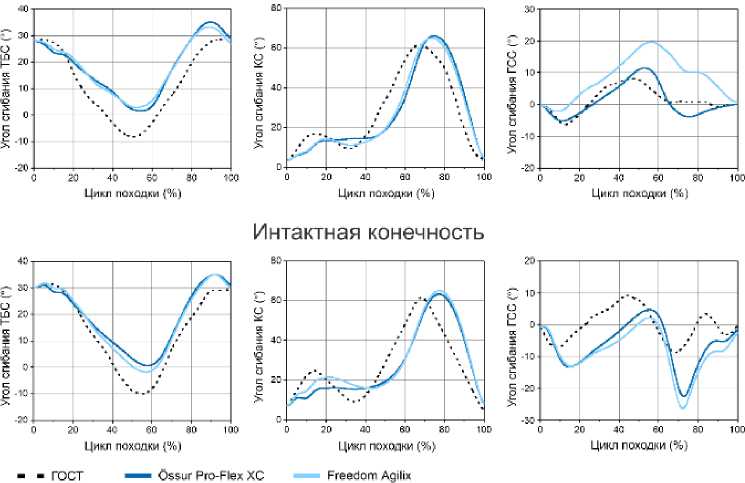
Рис. 8. Сравнение кинематических параметров исследованных моделей протезов стоп. На графике пунктирной линией обозначены данные ГОСТ; голубой – данные ходьбы пациента на протезе Ossur Pro-Flex XC;
синей – Freedom Agilix
Настройка протеза В сагиттальной Во фронтальной стопы плоскости плоскости
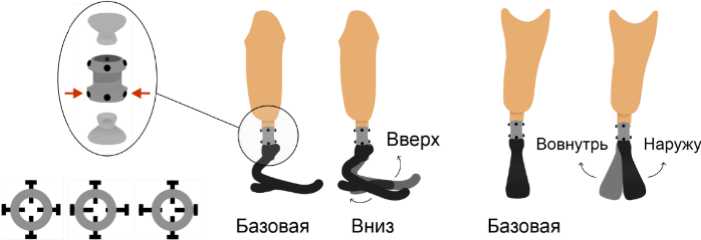
Рис. 9. Схема регулировки протеза стопы в сагиттальной и фронтальной плоскостях
Таблица 3
Сравнение общих биомеханических показателей походки ампутанта с различными настройками протеза
|
Настройка |
Скорость ходьбы, м/с |
Темп, шаг/мин |
Длительност ь двойного шага, с |
Длина двойного шага, м |
|
№ 1 |
1,04 |
80 |
1,5 |
1,56 |
|
№ 2 |
1,03 |
85 |
1,42 |
1,44 |
|
№ 3 |
0,88 |
80 |
1,5 |
1,32 |
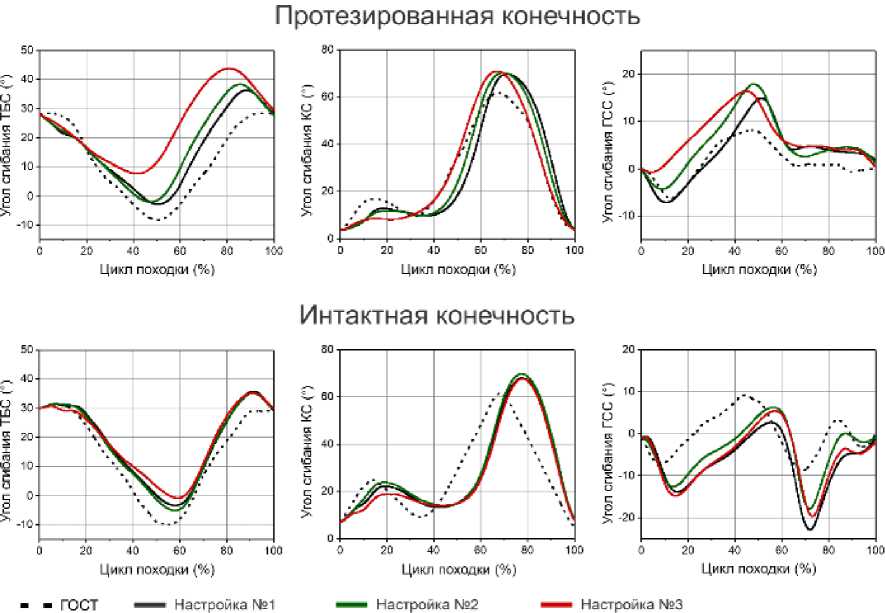
Рис. 10. Сравнение кинематических параметров ходьбы ампутанта с ТТА при различных конфигурациях протеза стопы: базовая (№ 1), регулировка во фронтальной плоскости (№ 2) и регулировка в сагиттальной плоскости (№ 3). На графике пунктирной линией обозначены данные ГОСТ; черной – данные ходьбы пациента при настройке № 1; зеленой – при настройке № 2; красной – при настройке № 3
нейтральное положение, характеризующееся отсутствием отклонений по вертикальной и горизонтальной осям.
В табл. 3 приведены ключевые параметры походки, включающие среднюю скорость, темп, а также временную и пространственную длину шага, полученные с использованием ИСЗД для различных конфигураций протеза. Анализ данных показывает, что за исключением конфигурации № 3, количественные значения исследуемых параметров не претерпевают существенных изменений. В случае настройки № 3 зафиксировано выраженное снижение скорости локомоции на 40%, что может интерпретироваться как признак значительного функционального дискомфорта пользователя. Со слов испытуемого, данная конфигурация протеза провоцирует субъективное ощущение неустойчивости, для компенсации которого требуются дополнительные мышечные усилия, приводящие к замедлению движения. Таким образом, интегральные параметры походки являются эффективным инструментом для идентификации заведомо дезадаптирующих конфигураций протеза. Однако для углубленного биомеханического анализа и выявления более тонких эффектов необходимы данные о кинематике суставов, в частности, об углах сгибания/разгибания.
Сравнительный анализ кинематических параметров походки, представленный на (рис. 10), демонстрирует соответствие усредненных данных, полученных для пользователя с ампутацией конечности при различных настройках протеза, нормативным значениям, регламентированным ГОСТ.
В первую очередь видно, что кинематика интактной конечности не демонстрирует значимых отклонений при смене конфигураций протеза. Различия между кинематическими профилями при базовой настройке (№ 1) и конфигурации № 2 являются статистически незначительными. Однако конфигурация № 2 характеризуется формированием паттерна, аналогичного устойчивой супинации стопы (опоре на наружный свод) при ходьбе. Несмотря на возможный субъективный комфорт для пользователя, данная биомеханическая стратегия потенциально снижает динамическую устойчивость, что проявляется при беге или выполнении маневров. Дополнительным негативным фактором является возникновение незначительной межконечностной асимметрии, наблюдаемой в виде смещения основных пиков на графиках сгибания КС, что в долгосрочной перспективе может оказывать негативное влияние на состояние опорно-двигательного аппарата (ОДА). При базовой настройке указанная асимметрия отсутствует.
Конфигурация № 3 демонстрирует выраженные отличия от других настроек, что обусловлено избыточным подошвенным сгибанием протеза стопы. Данная установка приводит к преждевременному наступлению фазы опоры, что субъективно воспринимается как значительный дискомфорт и проявляется видимой хромотой. Со слов испытуемого, такая конфигурация повышает риск зацепа протезом за малые неровности поверхности, создавая угрозу падений и травматизма. В качестве компенсаторного механизма наблюдается увеличение подъема бедра и преждевременное сгибание КС, что визуализировано на (рис. 10). Кинематический анализ подтверждает развитие выраженной асимметрии походки, устанавливаемой по смещению пиков на графиках углов в коленном суставе, что свидетельствует о повышенной нагрузке на ОДА.
Заключение
В рамках настоящего исследования была подтверждена целесообразность применения ИСЗД для решения ряда задач в области протезирования. С использованием коммерчески доступной ИСЗД осуществлялась регистрация кинематических параметров походки лиц с ампутациями на различных этапах реабилитации, при использовании разных моделей протезов и их конфигурационных настроек. По результатам работы можно сформулировать следующие ключевые выводы:
Данные кинематики ходьбы позволяют объективно отслеживать динамику восстановления двигательной функции в процессе реабилитации трастибиальных и трансфеморальных ампутнатов, что находит отражение в улучшении как интегральных биомеханических показателей, так и в нормализации самих кинематических паттернов.
Кинематический анализ является репрезентативным методом для оценки функциональных характеристик протезов, в частности, степени их упругой деформации, и позволяет дифференцировать протезы по их механическим свойствам.
Метод обладает высокой чувствительностью к изменениям пространственной ориентации протеза, которые оказывают существенное влияние на комфортность и биомеханическую эффективность локомоции. При этом у испытуемых, не проходивших курс реабилитации, конфигурационные изменения протеза статистически значимо не влияли на кинематику интактной конечности. Данные общих биомеханических показателей согласуются с результатами ранних исследований [47].
Использованная в работе ИСЗД Perception Neuron 3 продемонстрировала ряд преимуществ для исследовательских целей, подтвердив в соответствии с литературными данными достаточную метрологическую точность для анализа биомеханики движений человека. Важным достоинством системы является ее мобильность, обеспечивающая возможность проведения исследований не только в условиях прямолинейной ходьбы по ровной поверхности, но и при преодолении лестниц, движении по наклонным поверхностям и в других сложных средовых условиях. К ограничениям системы следует отнести подверженность дрейфу и снижение точности измерений в условиях воздействия сильных магнитных полей (например, от металлоконструкций) или при выполнении высокоскоростных движений, что требует учета данных факторов при планировании экспериментов для обеспечения достоверности результатов.
В процессе анализа данных было зафиксировано систематическое смещение основных пиков на кинематических графиках, свидетельствующее о сдвиге фазовой структуры шага относительно нормативов, установленных ГОСТ. Предположительной причиной данного расхождения является разница в скорости ходьбы, обусловленная, в т.ч. методологией сбора данных. Так, нормативная база формировалась с использованием гониометров, которые, в силу своих конструктивных особенностей (габариты, специфика крепления), могли вызывать у испытуемых ощущение дискомфорта и скованности, непроизвольно снижая темп ходьбы. Для верификации данной гипотезы и устранения методического несоответствия планируется формирование репрезентативной базы данных кинематики ходьбы лиц с транстибиальными и трансфеморальными ампутациями с последующей разработкой специализированного стандарта для анализа данных, получаемых с помощью ИСЗД.
