Поочередное преследование с тремя участниками (случай поточечной встречи)
")
Автор: Ширяев Виктор Дмитриевич, Анощенкова Екатерина Васильевна, Бикмурзина Равиля Ряшитовна
Журнал: Инженерные технологии и системы @vestnik-mrsu
Рубрика: Физико-математические науки
Статья в выпуске: 1, 2016 года.
Бесплатный доступ
Вопросы поочередного преследования группы уклоняющихся игроков рассматривались в ряде работ. Так, в исследованиях [1-3] решение задачи было найдено в предположении о том, что очередность встреч выбирается в начальный момент времени (программно), а игроки движутся по прямым линиям. В работе [4] приведено решение поставленной задачи с использованием подхода Р. Айзекса, а в [5] рассмотрены возможности выбора очередности встреч как программно, так и позиционно. В данной статье рассматривается простая дифференциальная игра на плоскости преследователя Р и коалиции двух убегающих E = { E1, E2}. Движения всех игроков предполагаются безынерционными; преследователь Р превосходит по скорости каждого из убегающих; всем игрокам известны цели, физические возможности, а также точное местоположение друг друга в каждый момент игры. Платой коалиции E (преследователя Р) служит (минус) суммарное время, затраченное преследователем Р на поточечную встречу с E1 и E2 (под встречей подразумевается совпадение местоположений преследователя и преследуемого). Выбор порядка преследования в начальный момент предполагается заданным (программный выбор очередности встреч). В работе найдена граница зоны безопасности второго из убегающих игроков. При решении задачи использовался также геометрический подход. Полученная система уравнений решалась с помощью систем компьютерной алгебры, в частности «Wolfram Mathematica». Определив границу зоны безопасности второго из убегающих игроков, можно аналогичным рассмотренному методом исследовать игру между преследователем Р и тремя преследуемыми, действующими согласованно (при этом первый из преследуемых игроков исключается из игры).
Простое преследование, правило параллельного сближения, окружность аполлония, зона безопасности, огибающая семейства, коалиция, стратегия
Короткий адрес: https://sciup.org/14720195
IDR: 14720195 | УДК: 004.9:517.9 | DOI: 10.15507/0236-2910.026.201601.020-031
Alternative pursuit with three participants (the case of pointwise meeting)
The issues connected with alternate pursuit of escapees group are considered in a number of papers. So in papers [1-3] the solution of the problem has been found in the assumption that the next meeting is selected at the initial time (by the program) and the players are moving straight. In paper [4] the solution of the task using the approach of R. Isaacs is given. In paper [5] the choice opportunities of the next meeting ( both software and positional) are considered. The article deals with a simple differential game on the pursuer plane P and the coalition of two escapees E={E1E2}.The movement of all the players are assumed as inertialess. The pursuer speed P exceeds the speed of each of the escapees. The targets, physical abilities and the exact location of each other in any moment of the game are known to all players. The price of the coalition (the pursuer P) is (minus) the total time spent by the pursuer P on the pointwise meeting with E and E2. A coincidence of pursuer and escapee location is meant under the meeting. The choice at the initial time of the persecution is supposed as given (software selectable regular meeting). The limit of the security zone of the second escapee has been found. A geometric approach is used in the problem solving. The resulting system of equations is solved numerically by means of computer algebra, in particular through the Wolfram Mathematics. After defining the boundary of the second escapee security zone one can study the game between the pursuer Р and three escapees acting in concord (the first escapee is eliminated from the game).
Текст научной статьи Поочередное преследование с тремя участниками (случай поточечной встречи)
Решению простейшей дифференциальной игры поочередного преследования коалиции двух убегающих игроков посвящены работы [1; 3–7]. В нашей статье исследуется игра на плоскости преследователя Р и двух убегающих – E1 и E2 . Рассмотрим границу зоны безопасности второго из преследуемых игроков.
Отметим, что убегающие игроки действуют согласованно, т. е. составляют коалицию E = {E1, E2} . Выигрыш игрока E определяется как время встречи P с последним из убегающих игроков, выигрыш P – как величина выигрыша E с обратным знаком. Под встречей подразумевается совпадение местоположений игроков P и Ei (здесь и далее: i = 1,2).
Предположим, что в каждый момент времени преследователь P имеет информацию о своем местоположении, а также местоположении и направлении скорости игрока Ei . Игрок E , в свою очередь, имеет информацию о своем местоположении и местоположении игрока P .
Пусть u – линейная скорость игрока P, vi – линейная скорость убегающего Ei, u > vi. Будем полагать, что игроки движутся с максимальными скоростями и для простоты считать, что u = 1, v1 < 1, v2 < 1. Решение игры строится в предположении, что преследователь P в момент времени t = 0 выбирает один из следующих способов поведения [1; 6; 8]:
-
1) использует правило параллельного сближения ( П -стратегия), преследуя сначала E1 , затем E2 ;
-
2) использует правило параллельного сближения ( П -стратегия), преследуя сначала E2 , затем E1 .
Среди данных предположений найдем наилучший ответ убегающей коалиции E , который подразумевает максимизацию времени преследования.
Предположим, что в момент времени t = 0 игрок P принимает решение преследовать сначала E1 , а затем E2 .
Введем систему координат xOy , центр которой совпадает с начальным положением преследователя P , а ось абсцисс ориентирована в направлении начального положения игрока E1 . Координаты точки P – P0 (0; 0), точки E1 – E 1 0 ( b ; 0), точки E2 – E 20 ( c ; d ) (верхними индексами будем отмечать положения игроков в соответствующие моменты времени). Границей зоны безопасности игрока E1 является окружность Аполлония ( C1 ) с радиусом r1 и центром в точке ( a ; 0) [7–8; 10]:
v 1
r i = i---- 2 b ; a = i---- 2 b .
1 - V 1 1 - V 1
Обозначим точку встречи игроков P и E1 : Pt 1 ( x1 ; y1 ). Координаты x1 , y1 определяются соотношениями:
x 1 = a + r 1 cos а ; у 1 = r 1 sin а . (2)
За время t1 (момент встречи P и E1) игрок E2 может попасть в любую точ- ку круга с центром в точке E2 и следующим радиусом:
x i + У 1 . (3)
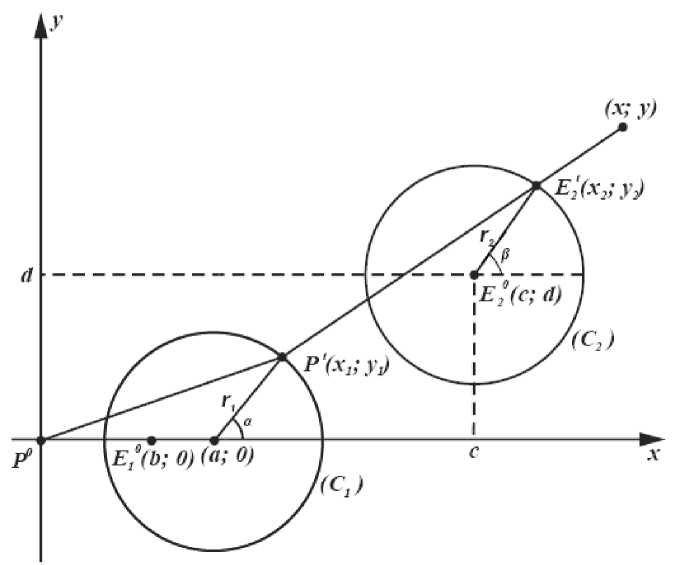
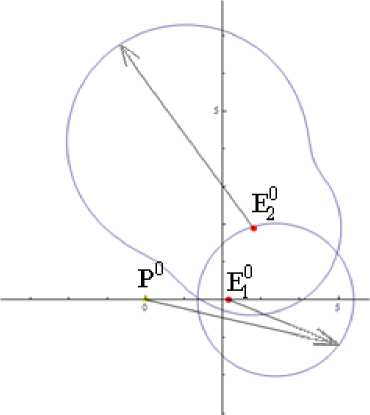
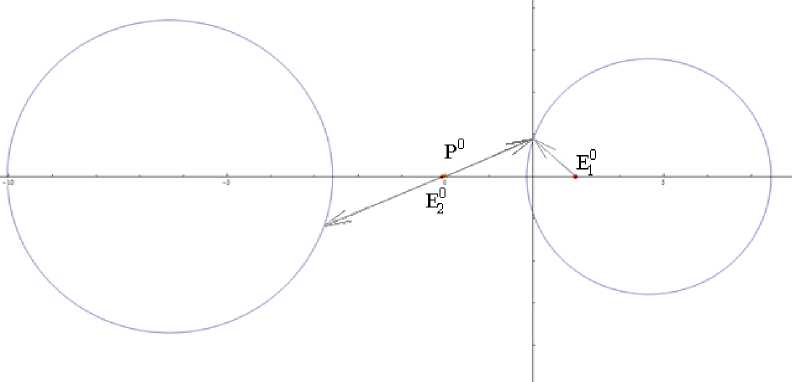
Р и с. 1. Построение границы зоны безопасности игрока E2
F i g. 1. Building a border security zone E2 player
Зафиксируем E2 в точке E 2 t ( x2 ; y2 ) окружности ( C2 ). Координаты x2 и y2 определяются по формулам:
x 2 = c + r 2cos в; y 2 = d + r 2 sin Д ;
x 2 = c + r 2cos в, (4)
ф ( а , в ) = V ( x - a — r 1 cos a )2 + ( y - r 1 sin a )2 -
( x - c - r 2 cos в )2 + ( У — d — r 2 sin в ) 2
-
V 2
.
где 0 < в < 2 п , в = const .
Граница зоны безопасности игрока E2 для начальных местоположений Pt , E 2 t – окружность Аполлония:
Пусть точка E 2 t «пробегает»
всю
окружность (C 2 ), т е. 0 < в < 2 п . Найдем
U Ф ( а , р ) , т е. огибающую семейства (5). 0 < в < 2 п
7 ^( x — c — r2 cos в ) 2 + ( y — d — r 2 sin в ) 2
—
9ф ( a , в ) = ( дв
— c —
v 2
^cos в ) ^sin в — ( У — d — r ^ sin в ) ^cos в о
= 0,
v 2
Для этого рассмотрим следующую систему [3; 9]:
Из второго уравнения системы (6) следует:
Таким образом,
( x - c - r2 cos в ) r 2 sin в -
- ( y - d - r 2sin в ) r 2cos в = 0 ,
sin в =
y-d
cos в =
V (x - c )2 +(y - d )2 x - c
или
V ( x - c ) 2 + ( y - d ) 2
( x - c - r 2 cos в ) r 2 sin в = = ( y - d - r 2 sin в ) r 2 cos в .
Подставив равенства (7) в первое уравнение системы (6) и преобразовав полученное выражение получим:
x - c -
x - c
к
V( x - c ) 2 +( y - d ) 2 ,
1 л
+ У - d - r2 к
v 2
У - d
V
V ( x - c ) 2 +( y - d ) 2 у
—
или
_ V( x - c ) 2 +( y - d ) 2
v 2
^^^^^^B
Ф ( a ) = ( x — a — r 1 cos a ) 2 + ( y — r 1 sin a ) 2
x — c )2
v 2
—
—
r 1 sm a ) 2 = 0
x - a ) 2 + y2 + r i^ - 2 ( x - a ) r 1 cos a - 2 yr 1 sin a -
^ (x — c )2 +(У — d )2
^^^^^^B
v 2
Г + 2 ar1 cos a
= 0.
Таким образом, при
У ( x - c ) 2 + ( У - d ) 2
v 2
> а а 2 + r 1 2 + 2 ar 1 cos а
ф ( а ) = У( x - а ) 2 + у 2 + г2 - 2 r 1 [ ( x - а ) cos а + у sin а ]
v 2
+
+д/ а2 + г2 + 2ar1 cos а = 0, а при
( x - с ) 2 + ( у - d ) 2
v 2
а2 + г2 + 2ar1 cos а x — a)2 + у2 + г2 — 2r1 [(x — a) cos а + у sin a J +
У ( x — с )2 +( у — d )2
—
v 2
■ a 2 + r2 + 2 ar1 cos a = 0.
Пусть теперь точка P «пробегает» всю окружность Аполлония (С1) , т. е. 0 < а < 2 п . Найдем ^ Ф ( а ) , 0 < а < 2 п
т. е. огибающую семейства (8). Путем преобразований, аналогичным рассмотренным выше, получим систему:
Ф ( a ) = У( x - a ) 2 + у 2 + г2 - 2 r 1 [ ( x - a ) cos а + у sin a J
v 2
a 2 + r2 + 2 ar 1 cos a
= 0,
dф(a) 1 (x - a) sin a - у cos a da r У(x - a )2 + у2 + r12 - 2r1 [(x - a) cos a + у sin a J a • sign
^(x-c)2 +(у -d)2
v 2
a 2 + r 1 2 + 2 ar 1 cos a
sin a
a 2 + r 1 2 + 2 ar 1 cos a
= 0.
Перепишем ее в следующем виде:
Rr - 1 ^ | = o,
( ( x - a ) sin a -

= 0,
где
R = ( x - a ) 2 + y 2 + r 1 2 - 2 r 1 [ ( x - a ) cos a + y sin a J ; Q = 1 + v 2 + 2 v 1 cos a ;
M =
( x - c ) 2 + ( y - d ) 2
-
v 2
Стремление избавиться от радикалов путем возведения в квадрат приводит к громоздкой системе уравнений четвертой степени, решение которой допустимо только численно с последующей непростой процедурой отсеивания сопутствующих корней, поэтому подобный метод в данном случае бесперспективен.
Задача может быть решена напрямую с помощью средств компьютерной алгебры (например, как в данной статье, системой «Wolfram Mathematica»). Стратегия коалиции E состоит в выборе того, под каким углом будет убегать игрок E1 . Очевидно, что после этого выбора определяется точка и время встречи игроков P и E1 . В этом
aQ .
случае оптимальной стратегией игрока E2 является удаление от этой точки с максимальной скоростью по прямой линии.
Построение границ зон безопасности было проведено с использованием функции «Parametric Plot», нахождение оптимального угла – с помощью «Maximize».
На рис. 2–10 представлены границы зон безопасности игроков E1 и E2 . На рис. 2 показаны направления движений игроков для обеспечения максимизации времени поимки E . На остальных рисунках направления движения игроков отличаются от оптимальных. Для примера были выбраны v1 = 0,6; v2 = 0,4.
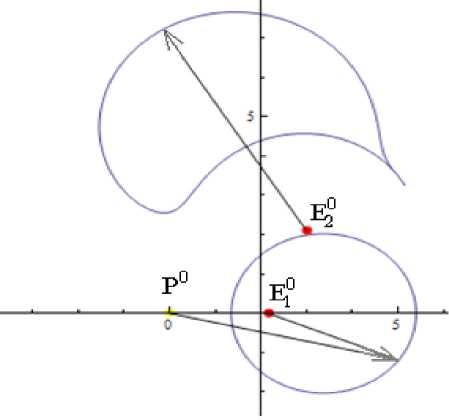
Р и с. 2. Расположение игрока E 2 0 вблизи окружности Аполлония (вне окружности)
F i g. 2. The player E 2 0 position near the circle of Apollonius (out of the circle)
Р и с. 3. Расположение игрока E2 0 вблизи окружности Аполлония (внутри окружности)
F i g. 3. The player E2 0 position near the circle of Apollonius (inside the circle)
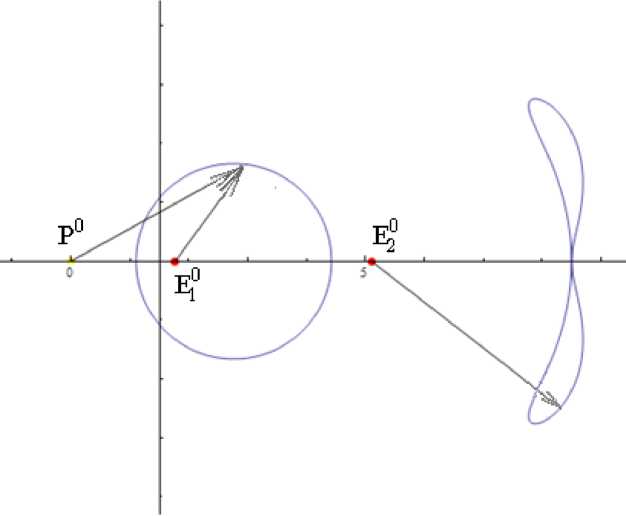
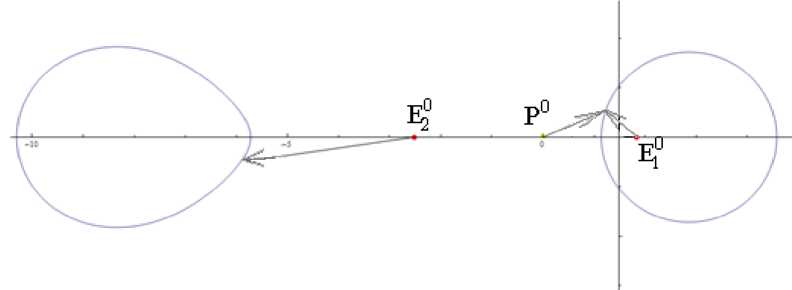
Р и с. 4. Расположение P 0 , E1 0 , E2 0 на одной прямой ( E2 0 – вне окружности Аполлония)
F i g. 4. P 0 , E1 0 , E2 0 are located on the same line, E2 0 is situated out of the circle of Apollonius
Р и с. 5. Расположение P 0 , E2 0 , E2 0 на одной прямой ( E2 0 – внутри окружности Аполлония)
F i g. 5. P 0 , E1 0 , E2 0 are located on the same line, E2 0 is situated inside the circle of Apollonius
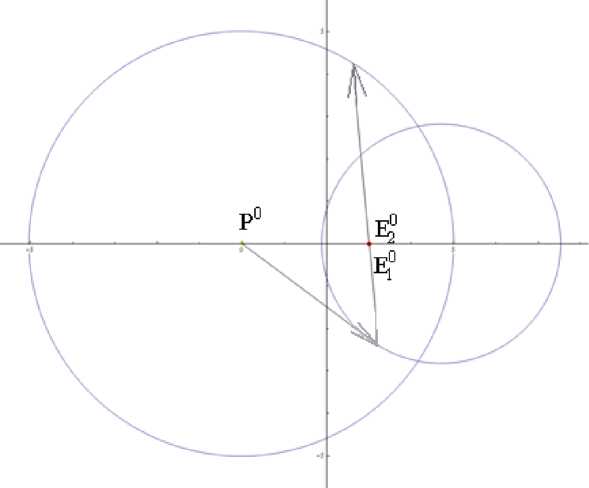
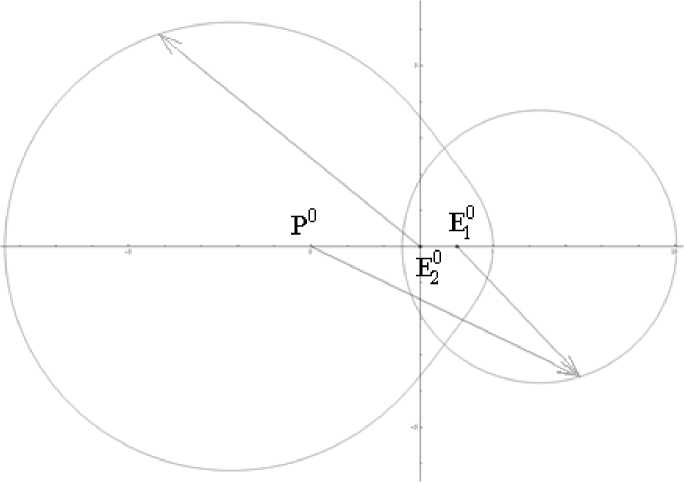
Р и с. 6. Начальные местоположения E1 0 = E2 0
F i g. 6. Initial location E1 0 = E2 0
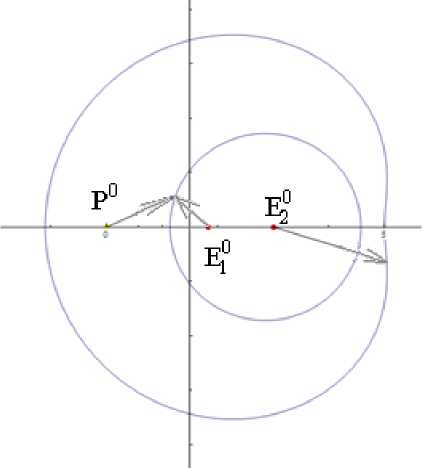
Р и с. 7. Расположение P 0 , E1 0 , E2 0 на одной прямой ( E2 0 – вблизи P 0 )
F i g. 7. P 0 , E1 0 , E2 0 are located on the same line, E2 0 is situated near P 0
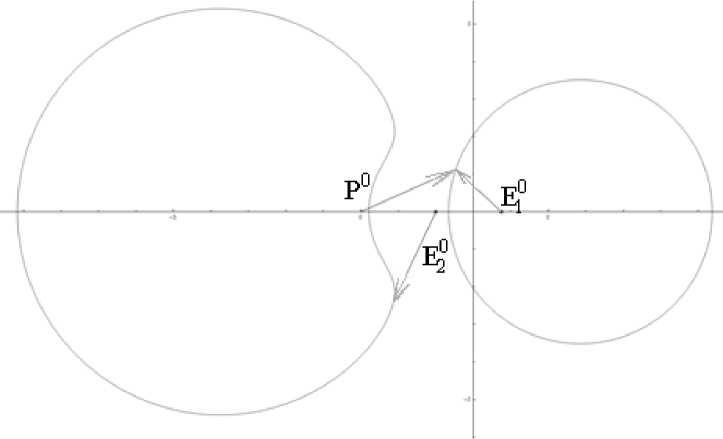
Р и с. 8. Расположение P 0 , E1 0 , E2 0 на одной прямой ( P 0 – между E1 0 и E2 0 )
F i g. 8. P 0 , E1 0 , E2 0 are located on the same line, P 0 is situated between E1 0 and E2 0
Р и с. 9. Расположение P 0 , E1 0 , E2 0 на одной прямой ( E2 0 – между E1 0 и P 0 внутри окружности Аполлония)
F i g. 9. P 0 , E1 0 , E2 0 are located on the same line, E2 0 is situated between E1 0 and P 0 inside the circle of Apollonius
Р и с. 10. Расположение P 0 , E1 0 , E2 0 на одной прямой ( E2 0 – между E1 0 и P 0 за окружностью Аполлония)
F i g. 10. P 0 , E1 0 , E2 0 are located on the same line, E2 0 is situated between E1 0 and P 0 out of the circle of Apollonius
На рис. 2–3 точка E 2 0 расположена достаточно близко к границе зоны безопасности игрока E 1 0 , поэтому часть границы зоны безопасности игрока E 2 0 близка к окружности. Причиной этого является то, что местоположение E 2 0 на границе зоны безопасности представляет собой точку разрыва, поскольку при выборе направления E1 к E2 направление движения игрока E2 однозначно выбрать невозможно.
Определив границу зоны безопасности второго из убегающих игроков,
можно аналогично рассмотренному исследовать игру между преследователем P и тремя преследуемыми E1 , E2 , E3 [2], действующими согласованно (фактически исключив из игры первого из преследуемых игроков). Кроме того, предложенный метод может быть использован при решении простейшей дифференциальной игры поочередного преследования коалиции двух убегающих игроков в случае R-встречи (R > 0) с первым игроком и поточечной встречи – со вторым.
Поступила 23.10.2015 г.
Submitted 23.10.2015
About the authors:
Physics and Mathematics 31
Список литературы Поочередное преследование с тремя участниками (случай поточечной встречи)
- Петросян Л. А., Ширяев В. Д. Групповое преследование одним преследователем нескольких преследуемых//Вестник ЛГУ (Сер. «Математика, механика и астрономия»). 1980. № 13. С. 50-57.
- Ширяев В. Д. О задачах простого преследования с четырьмя участниками//Математическое моделирование сложных систем. СПб, 1999. С. 52-53.
- Ширяев В. Д., Нестерова Т Н. Задача поочередного преследования со многими участниками//Методы возмущений в гомологической алгебре и динамика систем. Саранск: Изд-во Мордов. ун-та, 2004. С. 111-120.
- Шевченко И. И. О поочередном преследовании//Автоматика и телемеханика. 1981. № 11. С. 54-59. URL: http://www.mathnet.ru/links/56042ca7de6dcc2aca19b4094cf18822/at6041.pdf.
- Абрамянц Т. Г., Маслов Е. П., Рубинович Е. Я. Простейшая дифференциальная игра поочередного преследования//Автоматика и телемеханика. 1980. № 8. С. 5-15. URL: http://www.mathnet. ru/links/18b651a96ec80bd34126bef353968bc9/at7146.pdf.
- Петросян Л. А., Ширяев В. Д. Простое преследование одним преследователем двух преследуемых//Некоторые вопросы дифференциальных и интегральных уравнений и их приложения. Якутск, 1978. С. 103-108.
- Ширяев В. Д., Куляшова Н. М., Виноградова О. О. Геометрический подход к решению игр простого преследования со многими участниками. Деп. ВИНИТИ № 1254 -В 98 от 22.04.1998 г. 26 с.
- Петросян Л. А., Томский Г. В. Геометрия простого преследования. Новосибирск: Наука, 1983. 144 с.
- Ширяев В. Д., Анощенкова Е. В. Игра с «линией жизни»: случай поточечной встречи//Вестник Мордовского университета. 2014. № 1-2. С. 139-147. URL: http://vestnik.mrsu.ru/index.php/ru/articles/38-14-12/205-10-15507-vmu-025-201502-64.
- Ширяев В. Д. Бескоалиционная дифференциальная игра простого преследования//Управление, надежность, навигация. Саранск: Изд-во Мордов. ун-та, 1984. С. 33-П. URL: http://istina. msu.ru/collections/2883707.
