Постановка задач математического моделирования летательного аппарата с изменяемыми массогеометрическими характеристиками

Автор: Федоров Виктор Борисович, Козлов Артем Викторович
Рубрика: Краткие сообщения
Статья в выпуске: 33 (292), 2012 года.
Бесплатный доступ
Рассматриваются задачи наземной отработки аэробаллистических летательных аппаратов (ЛА) с изменяемыми массогеометрическими характеристиками и их навигационных систем. Сформулирован комплексный подход к решению задачи определения погрешностей углового положения бес-платформенной инерциальной навигационной системы (БИНС) на стенде определения массогеометрических характеристик (МГХ). Показаны преимущества такого подхода.
Наземная отработка летательного аппарата, стендовая отработка летательного аппарата, комплексный стенд
Короткий адрес: https://sciup.org/147151585
IDR: 147151585 | УДК: 629.12.053.13
Formulation of mathematical modeling problems of aerial vehicle with variable inertial characteristics
In article problems of land-based testing of aeroballistic flying machines with variable inertial characteristics and their navigating systems are considered. The integrated approach to the decision of a problem of definition of errors of angular position strapdown inertial navigation system (SINS) on the stand of defining inertial characteristics is formulated. Advantages of such approach are shown.
Текст краткого сообщения Постановка задач математического моделирования летательного аппарата с изменяемыми массогеометрическими характеристиками
Одним из актуальных направлений совершенствования управляемых аэробаллистических систем является повышение точности полета по траектории. Выполнение этой задачи невозможно без объективного контроля МГХ ЛА, а также эффективного решения задач управления и навигации. При этом в случае движения в плотных слоях атмосферы с большими скоростями происходит нагрев ЛА и связанные с ним деформации, что может приводить к неравномерности обтекания аппарата воздушным потоком и, как следствие, к таким явлениям как нутационнопрецессионная неустойчивость, параметрический резонанс и автоколебания [1]. Нагрев также может приводить к изменению МГХ ЛА и возникновению асимметрий, которые носят случайных характер и не могут быть скомпенсированы на этапе производства ЛА.
Рассматриваемый ЛА является асимметричным в смысле распределения массы, отделяемым от несущей платформы и двигающимся под действием сил инерции, силы тяжести Земли (влиянием которой обычно пренебрегают) и аэродинамических сил. ЛА не имеет двигательной установки и наружных рулевых органов. Внутри ЛА расположена система смещения центра масс, представляющая собой разновидность платформы Стюарта и реализующая, в общем случае, 6 степеней подвижности, а также система управления (СУ), в состав которой входит бесплат-форменная инерциальная навигационная система (БИНС).
Управление ЛА автономное и осуществляется посредством смещения центра масс, что вызывает нормальные управляющие воздействия со стороны атмосферы за счет изменения балансировочного угла атаки. Поэтому такое управление возможно только в достаточно плотных слоях атмосферы. Цель управления - выведение ЛА в нужную конечную точку траектории. Достижение этой цели подразумевает решение терминальной задачи, т. е. задачи, ограниченной по времени и требующей выполнения определенных условий на конечном участке полета (скорость, координаты). Особенностей, связанных с изменением положения конечной точки траектории (учет кинематики движения конечной точки) задача не имеет - считается, что точка неподвижна. Также считается, что вероятность сбоев БИНС при наличии направленной помехи мала, а влияние корреляционно экстремальных навигационных датчиков [4] на управление не учитывается в рассматриваемой постановке задачи.
Одна из возможных функциональных схем системы управления ЛА изображена на рис. 1. Дополнительно в обратную связь может быть включена информация о геофизических полях Земли и другая информация, на схеме изображенная пунктиром.
Информация от корреляционно экстремальных и др. навигационных датчиков
Отклонение от траектории
Возмущения
Желаемая траектория
♦
Система управления нормальными силами ЛА
Условная связь (через законы физики)
Действительная траектория
Кинематические параметры
Траекторные параметры

Погрешности БИНС
Рис. 1. Функциональная схема автономной системы управления ЛА
При автономном управлении движущимся в атмосфере ЛА неизбежно встает проблема определения его кинематических параметров - угловых и линейных скоростей и ускорений. В общем случае, такая задача может быть решена на основе анализа некоторого уже пройденного участка траектории, данные о котором получены в результате решения главной задачи навигации - определения координат некоторой связанной с объектом точки - полюса, и последующей аппроксимации этих данных на текущий участок полета. Однако более предпочтительным является непосредственное определение этих параметров в данный момент полета. В этом случае минимизируется задержка и неточности аппроксимации при определении кинематических параметров. В качестве одного из источников такой информации в полете может служить бортовая БИНС. В ней, в результате решения навигационной задачи, формируется вектор навигационных параметров F , включающий как радиус-вектор RH , определяющий расстояние до цели или наблюдателя (координаты точки ЛА относительно заданной системы координат), так и кинематические параметры й , V , а и углы ориентации.
Неизбежной составляющей функционирования навигационной системы являются разного рода погрешности, возникающие вследствие несовершенства первичных измерительных преобразователей и алгоритма функционирования, производственных погрешностей и т. п. В структуру погрешностей навигационной системы, помимо прочих, входят также погрешности установки в ЛА, т. е. несовпадения осей чувствительности БИНС и главных осей ЛА - главных центральных осей инерции, главной аэродинамической оси:
Q i + ^ Q i . , - , i = 1... 3
P+APi где Qi – углы ориентации системы координат (СК) OБXБYБZБ относительно СК OСXСYСZС; Pi – углы ориентации СК OБ X Б УБ Z Б относительно Oл X л УЛ Zл ; A Qi, A р - погрешности ориентации осей чувствительности блока инерциальной информации (БИИ) относительно OСXСYСZС и соответственно OЛXЛYЛZЛ (рис. 2).
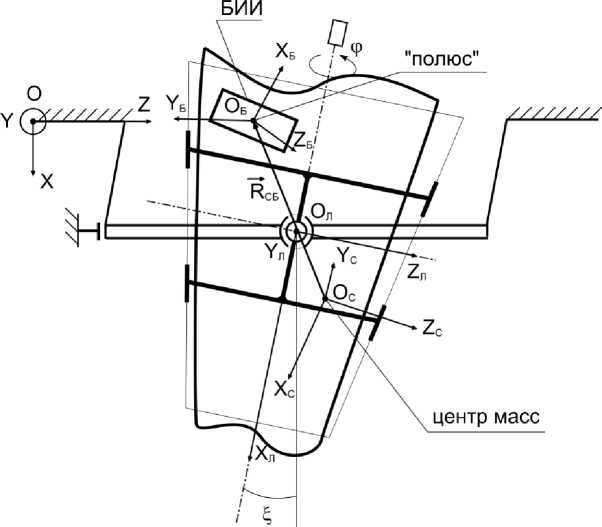
Рис. 2. ЛА с установленной БИНС на комплексном стенде
Такого рода отклонения, будучи неучтенными, приводят к систематическим погрешностям в обратной связи, снижая тем самым качество управления, а следовательно, точность достижения цели полета. Влияние этих погрешностей на управление обусловлено обратной связью по кинематическим параметрам, используемым устройством управления для анализа текущего состояния ЛА и выработки сигналов управления нормальными силами ЛА.
Помимо погрешностей ориентации навигационной системы относительной осей ЛА, необходимо учитывать также погрешности ее расположения относительно центра масс ЛА O С , т. е. —
R СБ + А? СБ , (2)
где A — :Б - погрешность расположения БИНС относительно центра масс, R СБ - радиус-вектор, определяющий положение центра чувствительности БИНС (точки «полюса») относительно центра масс ЛА (рис. 2).
Прямой учет погрешностей A — С Б, A Q i и A р , т. е. определение их расчетным путем на этапе разработки конструкции ЛА проблематичен, поскольку при производстве ЛА неизбежно возникают погрешности изготовления, индивидуальные для каждого ЛА, которые невозможно учесть на этапе проектирования. Более того, положение главных осей и центра масс ЛА корректируется уже после изготовления при стендовых испытаниях ЛА путем процедур коррекции, например, с использованием стенда комплексного определения МГХ.
Предлагается совместить процедуру коррекции МГХ ЛА на стенде и процедуру определения погрешностей (1.1, 1.2) БИНС. Преимущества и комплексность такого подхода заключаются в уменьшении количества стендовых испытаний ЛА – контроль и коррекция МГХ, проверка функционирования БИНС (включающая проверку электроники), определение погрешностей (1.1, 1.2)
производятся на одном стенде без переустановки ЛА, причем с несущественными модификациями как конструкции стенда, так и методики коррекции.
На рис. 3 изображена структурная схема полунатурных стендовых испытаний БИНС. Простота и универсальность таких испытаний заключается в применении специализированных пакетов программ, например MATLAB, для математического моделирования и решения задачи навигации, моделировании механической системы стенда и даже модели поведения объекта.
В качестве испытательного стенда может быть использовано наземное транспортное средство или летательный аппарат. В этом случае, как правило, на движущемся объекте, помимо испытуемой навигационной системы, устанавливают образцовую БИНС или платформенную ИНС, которая является источником эталонной информации о движении объекта. И далее полученную информацию обрабатывают так же, как и при стендовых испытаниях на динамических стендах.
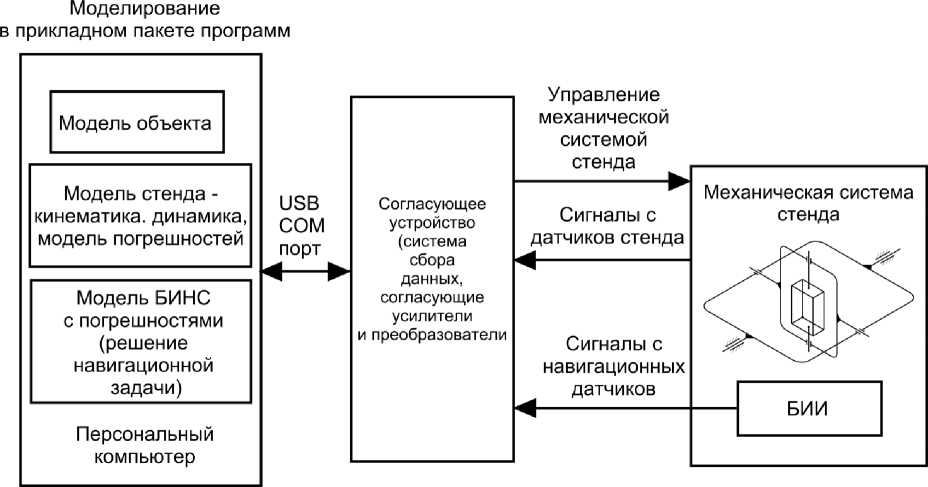
Рис. 3. Схема полунатурных стендовых испытаний БИНС
Для реализации указанного выше комплексного подхода к испытанию БИНС, необходимо решить следующие задачи:
-
– разработать математические модели функционирования БИНС, позволяющие оценить правильность функционирования БИНС на стенде, реализующем сложное движение;
-
– разработать математическую модель ЛА с установленной БИНС, учитывающую погрешности (1.1, 1.2) для оценки влияния указанных погрешностей на качество управления и точность достижения цели;
-
– разработать математическую модель, позволяющую определить погрешности (1.1, 1.2) по показаниям сигналов датчиков комплексного стенда для случая идеального функционирования БИНС;
-
– разработать методику проверки функционирования БИНС на стенде, реализующем сложное движение;
-
– разработать методику определения погрешностей (1.1 и 1.2) на комплексном стенде.
Список литературы Постановка задач математического моделирования летательного аппарата с изменяемыми массогеометрическими характеристиками
- Костров, А.В. Движение асимметричных баллистических аппаратов/А.В. Костров. -М.: Машиностроение, 1984. -272 с.
- Управление и наведение беспилотных маневренных летательных аппаратов на основе современных информационных технологий/под ред. М.Н. Красильщикова и Г.Г. Себрякова. -М.: ФИЗМАТЛИТ, 2003. -280 с.
- Динамическое проектирование систем управления автоматических маневренных летательных аппаратов: учеб. пособие для студентов втузов/Е.А. Федосов, В.Т. Бобронников, М.Н. Красильщиков и др.; под ред. Е.А. Федосова. -М.: Машиностроение, 1997. -336 с.
- Баклицкий, В.К. Корреляционно-экстремальные методы навигации и наведения//В.К. Баклицкий. -Тверь: ТО «Книжный клуб», 2009. -360 с.
