Повышение эффективности процессов подготовки и обучения сборочного персонала при использовании иммерсивных систем

Автор: И.В. Кудрявцев, А.А. Лим, А.А. Кутин
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 2 т.28, 2026 года.
Бесплатный доступ
Рассматривается подход к повышению эффективности процессов подготовки и обучения сборочного персонала машиностроительных предприятий за счёт применения иммерсивных систем (дополненной и виртуальной реальности). Предложена модель визуального сопровождения сборочных операций на базе фантомных объектов, интегрированная с гиперграфовым описанием технологического процесса. Описана динамика перемещения и ориентации объектов относительно фантомов и критерии завершения операций. Приведены результаты экспериментальных исследований на промышленном образце экструдера Hydra аддитивной установки INTED MAP, выполненные с участием операторов различной квалификации при сравнении традиционных методов и иммерсивной системы.
Иммерсивные системы, дополненная и виртуальная реальность, сборочные процессы, обучение персонала, аддитивное производство, фантомные объекты, INTED MAP
Короткий адрес: https://sciup.org/148333493
IDR: 148333493 | УДК: 004.93:621.71 | DOI: 10.37313/1990-5378-2026-28-2-127-132
Improving the Effi ciency of the Processes of Training and Education of Assembly Personnel When Using Immersive Systems
An approach to improving the efficiency of the processes of training and educating assembly personnel of machine-building enterprises through the use of immersive systems (augmented and virtual reality) is considered. A model of visual support of assembly operations based on phantom objects is proposed, integrated with a hypergraphic description of the technological process. The dynamics of the movement and orientation of objects relative to the phantoms and the criteria for completing operations are described. The results of experimental studies on an industrial sample of the Hydra extruder of the INTED MAP additive installation, performed with the participation of operators of various qualifications when comparing traditional methods and an immersive system, are presented.
Текст научной статьи Повышение эффективности процессов подготовки и обучения сборочного персонала при использовании иммерсивных систем
Повышение производительности и качества сборочных процессов в машиностроении в условиях растущей конкуренции и усложнения изделий требует перехода к цифровым методам подготовки и поддержки персонала. Традиционные средства обучения и документирования технологических процессов не обеспечивают необходимой гибкости, скорости освоения операций и снижения ошибок.
Перспективным направлением является использование иммерсивных систем, объединяющих технологии дополненной и виртуальной реальности. Такие системы позволяют формировать для оператора пространственно совмещённую визуальную среду, в которой элементы оборудования и сборочные единицы дополняются виртуальными подсказками, инструкциями и контролем действий в режиме реального времени [1, 2].
МОДЕЛЬ ВИЗУАЛЬНОГО СОПРОВОЖДЕНИЯ НА БАЗЕ ФАНТОМНЫХ ОБЪЕКТОВ
Ключевым элементом предлагаемого подхода является система фантомных объектов, задающих целевые положения и ориентацию компонентов в пространстве (рис. 1). Для каждого физического компонента формируется виртуальный «фантом» с координатами xp и ориентацией qp.
Состояние системы в момент времени t описывается набором переменных:
-
. H(t) ∈ {0,1} — индикатор нахождения объекта в руке оператора;
-
. P(t) ∈ {0,1} — индикатор контакта с фантомом;
-
. x(t) ∈ R³ — текущая позиция объекта;
-
. q(t) ∈ SO(3) — текущая ориентация объекта.
Условие возврата к фантомному положению формулируется как
Cr(t )= -H(t) Л P(t), то есть активируется при отпускании объекта в зоне фантома. Тогда положение объекта обновляется по выражению
x(t+∆t) = H(t)·x ₕ (t) + [C ᵣ (t) ∧ D(x(t),x ₚ )]·x ₚ + [(H(t) ∨ (C ᵣ (t) ∧ D(x(t),x ₚ )))]·x(t), где D(x(t), x ₚ ) = x(t) - x ₚ ≥ ε — условие превышения порогового расстояния ε = 0,01 м.
Аналогично задаётся динамика ориентации через кватернионы q(t). При выполнении условий возврата система плавно выравнивает объект с ф антомом, визуально подсказывая оператору требу- Кудрявцев Илья Владиславович, старший преподаватель кафедры цифровых и аддитивных технологий.

Рис. 1. Система визуального сопровождения объекта-фантома
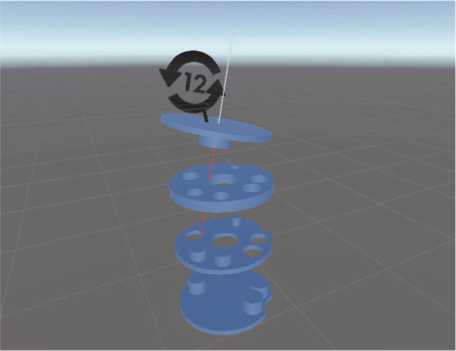
Рис. 2. Визуализация виртуального помощника отклонения угла поворота относительно заданной оси сопряжения
емый угол наклона и направление вращения для сопряжения поверхностей деталей (рис. 2) [3].
Достижение целевого положения и ориентации фиксируется при выполнении критериев: |x(t) - x ₚ | < ε ;
||q(t) - q ₚ ||_F < δ _rot, где δ _rot = 0,01 рад.
Таким образом обеспечивается формализованное описание процесса позиционирования в иммерсивной среде.
ИНТЕГРАЦИЯ С ГИПЕРГРАФОВОЙ МОДЕЛЬЮ СБОРОЧНОГО ПРОЦЕССА
Технологический процесс сборки моделируется в виде гиперграфа, где узлы n ᵢ соответствуют состояниям изделия и сборочным операциям, а рёбра задают зависимости и ограничения по последовательности действий. Каждой ноде сопоставляется набор параметров фантома Ф ᵢ = (x ₚᵢ , q ₚᵢ , ε ᵢ ).
Порядок активации фантомов определяется топологической сортировкой гиперграфа с учётом весов, отражающих критичность операций и требования к точности. Иммерсивная система последовательно подсвечивает активный фантом, транслируя оператору локальные инструкции, пошаго- вую анимацию и контроль совместимости действий с заданной последовательностью.
Такое объединение формальной модели и визуального сопровождения позволяет адаптировать сценарий сборки под квалификацию оператора, корректируя уровень детализации подсказок, ско- рость подачи информации и допустимые отклонения от номинальных траекторий [4, 5].
ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ НА ЭКСТРУДЕРЕ HYDRA
Экспериментальная апробация методики выполнена на промышленном образце экструдера Hydra аддитивной установки INTED MAP. Иммерсивная система разрабатывалась на базе гарнитуры дополненной реальности Microsoft HoloLens 2, используемой как интерфейс для реализации предложенной модели фантомных объектов (рис. 3).
Модель экструдера была оцифрована в системе САПР, каждый компонент выделен в отдельные узлы и детали (рис. 4). Далее на основе алгоритма формализации построен гиперграф
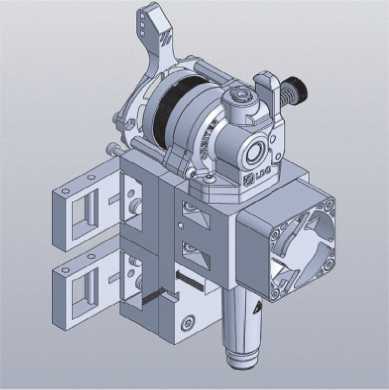
Рис. 3. Экструдер Hydra аддитивной установки INTED MAP
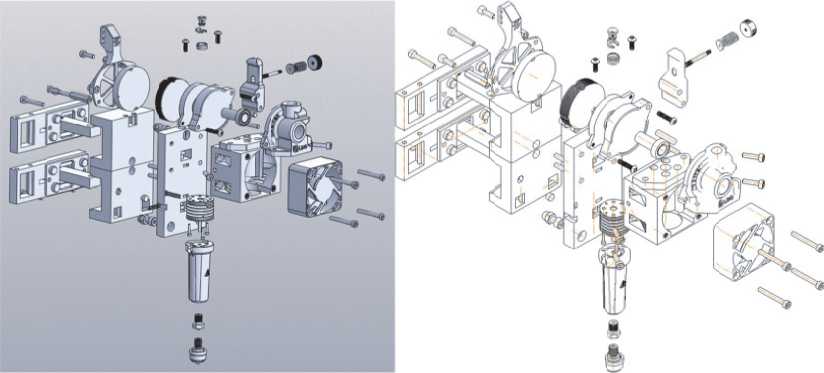
Рис. 4. Сборочный чертеж экструдера Hydra
сборочного процесса, на базе которого сгенерирована нодовая структура для иммерсивного сопровождения оператора.
В исследованиях участвовали 10 операторов различной квалификации. Каждый выполнял серию сборок по двум сценариям:
-
1. традиционный метод на основе текстовой и графической документации;
-
2. метод с использованием иммерсивной системы фантомного позиционирования.
РЕЗУЛЬТАТЫ И АНАЛИЗ
Общее время сборки T представлено суммой компонент основное вспомогательное контроль исправление.
Основное время Tосновное включает собственно установку, совмещение и затяжку элементов.
При внедрении иммерсивной системы оно сократилось примерно на 14 % за счёт более точного позиционирования по фантомам. Наибольший эффект получен по вспомогательному времени
T вспомогательное
(поиск деталей, работа с документацией, планирование шага): сокращение порядка 3 раз за счёт автоматической визуализации следующей операции и отказа от бумажных инструкций [6].
Время контроля Tконтроль при иммерсивном сопровождении интегрируется непосредственно в процесс выполнения операции: отклонения от допустимого диапазона отображаются в виде подсказок, что уменьшает потребность в отдельной проверке. Время исправления ошибок Tисправление снижается вследствие уменьшения их числа.
В целом среднее время сборки уменьшилось с 68,7 до 42,3 мин, что соответствует повышению производительности на 38,4 %, а среднее количество ошибок — с 3,8 до 1,2 на сборку (снижение на 68,4 %) (рис. 5).
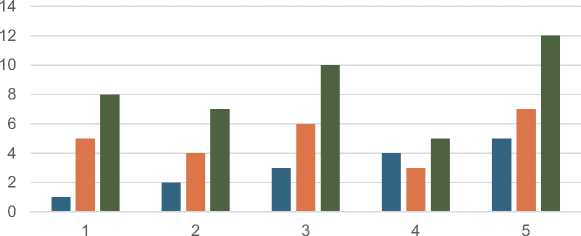
■ Операция ■ Разработанная система (мин)
■ Традиционные инструкции (мин)
Рис. 5. Сравнение времени выполнения операций сборки с использованием разработанной системы и традиционных инструкций
Анализ кривых обучения показал экспоненциальную сходимость времени выполнения операций к оптимальному значению:
T(n) = Topt + (To - Topt>exp(-^n), где To — время первой сборки, Topt — время опытного оператора, n — номер повторения. Для иммерсивной системы коэффициент скорости обучения составил λ = 0,42, тогда как для традиционного метода \радиц = 0,18 (рис. 6). Это означает, что новичок в иммерсивной среде достигает производительности опытного оператора примерно за 8–9 повторений (около 5 рабочих дней), тогда как при традиционном подходе требуется 22–25 повторений (около 15 дней).
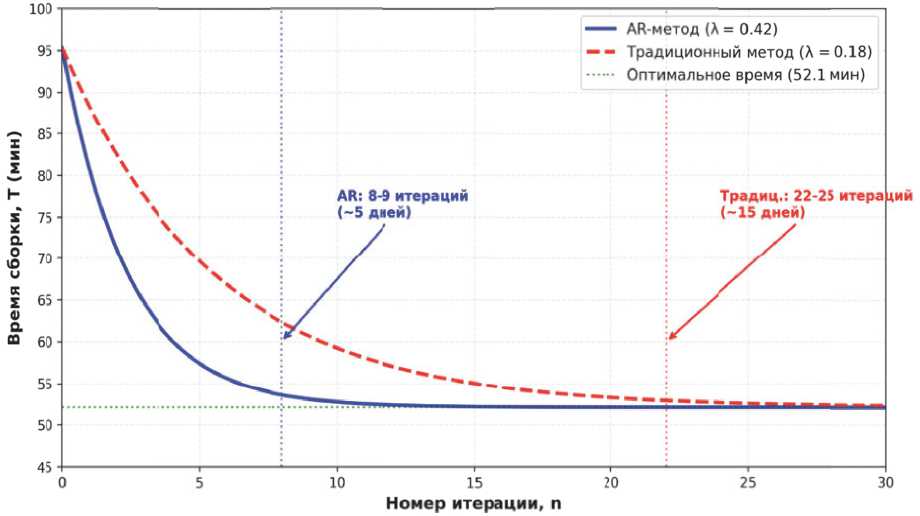
Рис. 6. Кривая обучения операторов при сборке экструдера
Зависимость времени операции от квалификации оператора K описывается гиперболой
T(K) = T min + A / (K + B).
При использовании иммерсивной системы параметр A уменьшается, что указывает на снижение чувствительности времени сборки к уровню квалификации: система частично компенсирует недостаток опыта за счёт пространственных подсказок и контроля [7].
Снижение вариативности времени выполнения в 1,9 раза свидетельствует о более стабильной работе операторов в иммерсивной среде. Корреляционный анализ показал сильную отрицательную связь между числом использований иммерсивной системы и временем операции (коэффициент Пирсона r ≈ -0,87), тогда как для традиционного метода связь слабее.
Установлена экспоненциальная зависимость уменьшения числа ошибок во времени
E(t) = Emin + (Eo - E^-expep-t), причём коэффициент μ для иммерсивной системы примерно в 2,5 раза выше, чем для традиционного обучения. Дисперсионный анализ (ANOVA) подтвердил статистически значимое влияние применения иммерсивной системы и квалификации оператора на время операций и количество ошибок, а регрессионная модель объясняет более 89 % вариации исследуемых показателей [8].
ЗАКЛЮЧЕНИЕ
Разработана и исследована модель иммерсивного сопровождения сборочных процессов на основе фантомных объектов и гиперграфового описания технологического маршрута. Иммерсивная система, реализованная на промышленном образце экструдера Hydra аддитивной установки INTED MAP, продемонстрировала:
-
. сокращение общего времени сборки до 38 %;
-
. уменьшение количества ошибок почти на 70 %;
-
. более чем четырёхкратное ускорение обучения новых операторов;
-
. снижение зависимости временных характеристик от квалификации и уменьшение вариативности результатов.
Полученные данные свидетельствуют о высокой эффективности иммерсивных систем в задачах подготовки и обучения сборочного персонала и обоснованности их внедрения в практику машиностроительных предприятий в рамках цифровой трансформации производства.
