Повышение эффективности промышленного трактора-бульдозера совершенствованием алгоритма управления моторно-трансмиссионной установкой. Результаты математического моделирования и полевых испытаний

Автор: Кондаков С.В., Ломакин Г.В., Павловская О.О., Танин-шахов А.А., Вансович Е.И., Ишбулатов А.Р., Жуков В.Д., Горелый А.Е., Иванов С.В., Чеботарв Ф.В.
Рубрика: Контроль и испытания
Статья в выпуске: 1 т.24, 2024 года.
Бесплатный доступ
Внедрение в конструкцию промышленных тракторов бесступенчатых внешне регулируемых гидростатических и электрических бесступенчатых трансмиссий, а также двигателей внутреннего сгорания с различным управлением подачей топлива открывает широкие перспективы оптимизации работы бульдозеров и других технологических машин на базе промышленных тракторов. Оптимизации, в первую очередь, по расходу топлива. Приведённые в статье материалы включают в себя математическое моделирование трактора в технологическом цикле бульдозирования, постановку задачи оптимального совместного управления двигателем и трансмиссией, отработку алгоритма управления, его реализацию в контроллере, условия и методику проведения испытаний, результаты испытаний, проведенных на полигоне завода «ДСТ-УРАЛ» в с. Калачево и анализ полученных результатов. В итоге проведенной коллективом авторов работы зафиксирован положительный эффект от внедрения разработанной автоматической системы, заключающийся не только в ожидавшейся существенной экономии топлива, но и в повышении ресурса двигателя внутреннего сгорания и насосов гидростатической трансмиссии, в повышении производительности бульдозера, снижении влияния человеческого фактора (квалификации оператора) на производительность трактора, повышении комфорта работы оператора, уменьшении случаев срабатывания системы предохранения двигателя от перегрузок. Имитационное моделирование проведено в среде программирования VISSIM, код для контроллера создан в CoDeSys, испытание автоматической системы реализовано на серийном тракторе-бульдозере производства завода «ДСТ-УРАЛ» D14 класса тяги 14 тонн в августе 2023 г. На изобретение получен патент Российской Федерации № 2783552 «Способ и устройство управления моторно-трансмиссионной установкой промышленного трактора с бесступенчатой трансмиссией». Изобретение внедрено на заводе «ДСТ-УРАЛ».
Бульдозер, двигатель внутреннего сгорания, гидростатическая трансмиссия, топливная экономичность, система автоматического управления
Короткий адрес: https://sciup.org/147243221
IDR: 147243221 | УДК: 629.114.2 | DOI: 10.14529/engin240105
Increasing the efficiency of an industrial tractor-bulldozer by improving the control algorithm of the motor-transmission unit. Results of mathematical modeling and field tests
The introduction into the design of industrial tractors of continuously variable externally adjustable hydrostatic and electric continuously variable transmissions, as well as internal combustion engines with controlled fuel supply, opens up broad prospects for optimizing the operation of bulldozers and other technological machines based on industrial tractors. Optimization, first of all, in terms of fuel consumption. The materials presented in the article include mathematical modeling of a tractor in the bulldozing technological cycle, formulation of the problem of optimal joint control of the engine and transmission, development of the control algorithm, its implementation in the controller, test conditions and methodology, test results carried out at the plant test site “DST-URAL” in Kalachevo and analysis of the results obtained. As a result, the work carried out by the team of authors recorded a positive effect from the implementation of the developed automatic system, which consisted not only in the expected significant fuel savings, but also in increasing the service life of the internal combustion engine and hydrostatic transmission pumps, and increasing the productivity of the bulldozer, reducing the influence of the human factor (operator qualifications) on tractor performance, increasing operator comfort, reducing cases of activation of the engine overload protection system. Simulation modeling was carried out in the VISSIM programming environment, the code for the controller was created in CoDeSys, testing of the automatic system was implemented on a serial bulldozer tractor produced by the DST-URAL plant D14 with a traction class of 14 tons in August 2023. A patent of the Russian Federation was received for the invention No. 2783552 “Method and device for controlling the motor-transmission unit of an industrial tractor with a continuously variable transmission”. The invention was introduced at the DST-URAL plant.
Текст научной статьи Повышение эффективности промышленного трактора-бульдозера совершенствованием алгоритма управления моторно-трансмиссионной установкой. Результаты математического моделирования и полевых испытаний
Актуальность темы исследования
Технологический процесс бульдозирования характеризуется десятикратным изменением внешней нагрузки на моторно-трансмиссионную установку (МТУ) промышленного трактора. МТУ состоит из двигателя внутреннего сгорания (ДВС) и трансмиссии. Трансмиссии могут быть механическими, гидродинамическими, гидрообъёмными или электрическими.
В данной статье речь пойдет о промышленном тракторе – бульдозере с гидрообъёмной бортовой трансмиссией.
Переключать передачи при бульдозировании невозможно, поэтому на промышленных тракторах с механической трансмиссией изменение внешних сопротивлений движению трактора преодолевается ДВС. При этом расход топлива соответствует регуляторной характеристике ДВС.
Гидромеханическая трансмиссия существенно разгружает ДВС от переменных нагрузок. В идеальном случае при непрозрачном гидротрансформаторе (ГТ) ДВС может работать при максимальной мощности. Но максимальная мощность не всегда требуется. На частичных характеристиках ДВС ГТ, имеющий так называемую внутреннюю автоматичность, не может воспринять момент двигателя полностью, а только в квадратичной (от скорости) зависимости по моменту или в кубической по мощности. Например, если частота вращения коленвала ДВС уменьшить до 0,9 от номинала, мощность ДВС по внешней характеристике сохранится почти полностью, а воспринимаемая насосом ГТ мощность составит всего 0,73 от номинала.
На фоне вышесказанного весомым преимуществом обладают бесступенчатые трансмиссии с внешним регулированием, в частности гидрообъёмные передачи (ГОП). Мировые тенденции развития промышленных тракторов высокого класса тяги связаны с применением именно таких трансмиссий, управляемых совместно с двигателем внутреннего сгорания [1-6].
Современные промышленные тракторы, выпускаемые заводом «ДСТ-УРАЛ» (г. Челябинск), оборудованы двигателями ЯМЗ (г. Ярославль) и трансмиссиями фирмы ПСМ (г. Екатеринбург). Обе составляющие МТУ управляются контроллерами, что создает заманчивые предпосылки формирования совместного управления ГОП и ДВС с различными целями [7-9].
В данной статье изложены материалы исследования, создания алгоритма работы системы автоматического управления с минимизацией расхода топлива в технологическом цикле бульдози-рования.
Теоретическое обоснование, формирование алгоритма управления
Математическая модель движения трактора с гидростатической трансмиссией [10–16] дополнена функцией переменного сопротивления передвижению трактора, соответствующего реальному процессу бульдозирования [17-19].
На рис. 1 - закон нагружения бульдозера в виде силы тяги (в долях веса, вес 187000 Н, бульдозерный цикл, сопровождающийся ростом сопротивления передвижению в 10 раз (за 60 с) [19], на рис. 2 приведен график изменения давления в ГОП.
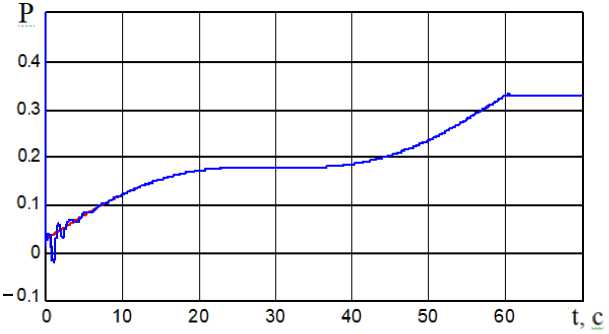
Рис. 1. Закон нагружения бульдозера
Fig. 1. Bulldozer loading law
С использованием программного комплекса AVL получена экономичная характеристика двигателя ЯМЗ-536 (табл. 1), подобная приведенной в [20] для ЯМЗ-238. В табл. 1 мощность Ne в кВт, удельный расход топлива ge в г/(кВт^ч).
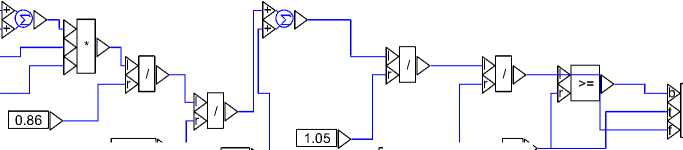
Алгоритм работы автоматической системы (АС) совместного управления ДВС и ГОП с целью минимизации расхода топлива при выполнении технологической операции следующий: задающим сигналом является скорость движения, контроль давления в гидролиниях: при заданной скорости дает информацию о мощности технологического процесса (мощности на ведущем коле- се). Через общий КПД трансмиссии (примерно 0,86) считают мощность ДВС. По мощности ДВС и экономичной характеристике пересчитывают частоту вращения коленвала (рис. 3).
Таблица 1
Экономичная характеристика ЯМЗ-536
Table 1
Economical characteristics of YAMZ-536
|
Нагрузка на ДВС, % |
Частота вращения двигателя, мин –1 |
|||||||||||||
|
Ne |
ge |
Ne |
ge |
Ne |
ge |
Ne |
ge |
Ne |
ge |
Ne |
ge |
Ne |
ge |
|
|
1400 |
1500 |
1600 |
1700 |
1800 |
1900 |
2000 |
||||||||
|
100 |
132,2 |
191 |
141,9 |
193 |
148,4 |
195 |
157,9 |
196 |
166,5 |
199 |
170,5 |
201 |
172,4 |
203 |
|
90 |
118,9 |
189 |
127,7 |
192 |
133,5 |
192 |
142,1 |
196 |
149,8 |
200 |
153,4 |
202 |
155,1 |
206 |
|
80 |
105,7 |
189 |
113,6 |
192 |
118,7 |
192 |
126,3 |
198 |
133,2 |
201 |
136,4 |
203 |
137,9 |
207 |
|
70 |
92,5 |
190 |
99,4 |
193 |
103,9 |
193 |
110,5 |
199 |
116,5 |
202 |
119,3 |
204 |
120,7 |
208 |
|
60 |
79,3 |
191 |
85,2 |
195 |
89,0 |
195 |
94,7 |
199 |
99,9 |
204 |
102,3 |
205 |
103,4 |
209 |
|
50 |
66,1 |
196 |
71,0 |
197 |
74,2 |
196 |
79,0 |
201 |
83,2 |
205 |
85,2 |
207 |
86,2 |
211 |
|
40 |
52,9 |
203 |
56,8 |
206 |
59,4 |
203 |
63,2 |
207 |
66,6 |
210 |
68,2 |
216 |
68,9 |
221 |
|
30 |
39,6 |
219 |
42,6 |
221 |
44,5 |
220 |
47,4 |
226 |
49,9 |
229 |
51,1 |
236 |
51,7 |
241 |
|
20 |
26,4 |
240 |
28,4 |
239 |
29,7 |
243 |
31,6 |
246 |
33,3 |
254 |
34,1 |
264 |
34,5 |
270 |
|
10 |
13,2 |
294 |
14,2 |
299 |
14,8 |
297 |
15,8 |
307 |
16,6 |
330 |
17,0 |
351 |
17,2 |
356 |
– оптимальный диапазон работы
– удовлетворительный диапазон работы
– неэффективный диапазон работы и Pf22 ]>
И Pf11>
М Vтр зад ]>
m erge >-И %ППТ]>
1000J
42 1^
200 х>—1
Рис. 3. Расчет степени нажатия на педаль подачи топлива Fig. 3. Calculation of the degree of pressure on the fuel pedal
Ргоп-» Mila
|
40 |
|||||||
|
20 |
|||||||
|
0 |
1 |
О 10 20 30 40 50 60 t, С
Рис. 2. Давление в магистрали нагнетания ГОП Fig. 2. Pressure in the HST discharge line
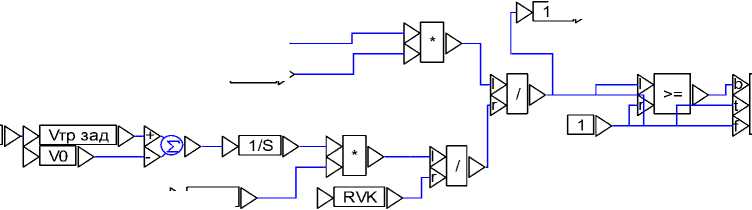
По степени нажатия на педаль подачи топлива (ППТ) и известной скорости вращения ведущего колеса (ВК) считают параметр регулирования мотора (при этом объемный КПД ГОП задан 0,9), когда U мотора достигает 1, начинают уменьшать подачу насоса (рис. 4).

1/XIM
й %ППТ> 2001>
m erge UM1> и KBR
Рис. 4. Расчет подачи мотора и насоса ГОП с учетом обратной связи по скорости Fig. 4. Calculation of the flow of the motor and the pump, taking into account speed feedback
На рис. 5 приведены графики положения ППТ ДВС, относительных объёмов мотора и насоса ГОП. При малой частоте вращения КВ ДВС регулируем объём мотора, при больших – объём на- соса.
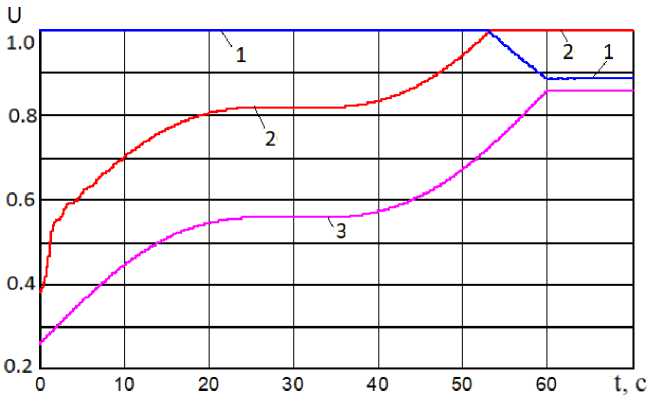
Рис. 5. Относительные величины объёмов мотора (1), насоса (2), положения педали подачи топлива (3) Fig. 5. Relative values of the volumes of the motor (1), pump (2), fuel pedal position (3)
На рис. 6 приведена зависимость крутящего момента от частоты вращения коленчатого вала ДВС в процессе бульдозирования, она соответствует экономичной характеристике ДВС по табл. 1.
В результате – скорость трактора 0,9 м/с, расход топлива за цикл – 26,7 л/час. Для сравнения: если установить частоту вращения коленвала ДВС 170 р/с и выполнять ту же работу, то 28 л/час; если установить 200 р/с – 29,7 л/час.
Частоты вращения коленвала ДВС и мотора ГОП приведены на рис. 7. График 1 свидетельствует о том, что средняя частота вращения коленвала ДВС меньше 150 р/с. Снижение средней частоты вращения коленвала ДВС с 200 р/с до 150 р/с существенно увеличивает ресурс ДВС. Это дополнительный эффект от внедрения предлагаемого способа управления МТУ трактора-бульдозера.
По результатам математического моделирования работы бульдозера с системой автоматического регулирования частоты вращения коленвала ДВС с целью минимизации расхода топлива в технологическом цикле сформулирован алгоритм управления МТУ и далее реализован в среде программирования CoDeSys для контроллера. Подготовлена методика и программа испытаний
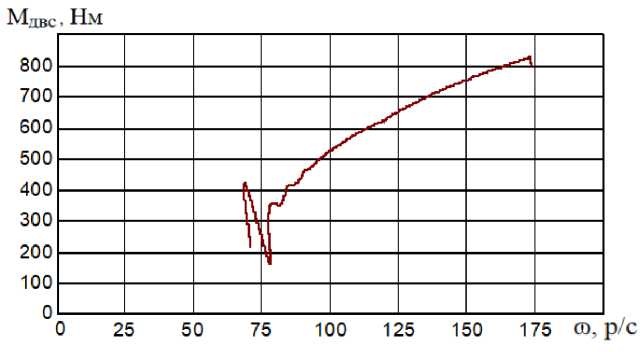
Рис. 6. Зависимость момента ДВС от частоты вращения коленчатого вала в технологическом процессе бульдозирования Fig. 6. Dependence of internal combustion engine torque on rotation speed crankshaft in the bulldozing process
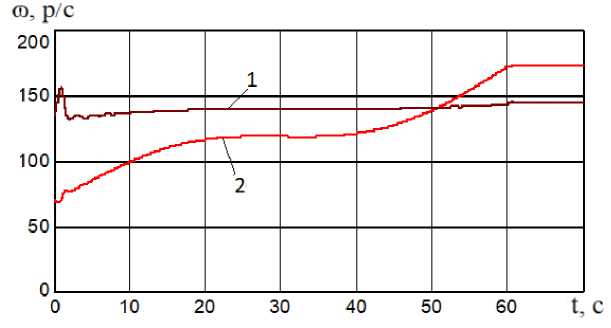
Рис. 7. Частота вращения коленчатого вала ДВС (1) и мотора ГОП (2)
Fig. 7. Rotation speed of the internal combustion engine crankshaft (1) and HST motor (2)
Результаты натурных испытаний, проведенных на полигоне завода «ДСТ-УРАЛ»
-
30 августа и 4 сентября 2023 года на полигоне в с. Калачево проведены испытания системы управления машиной с функцией автоматического регулирования частоты вращения коленвала ДВС на бульдозере D14 с заводским номером № 10003536.
Каждый испытательный цикл включал в себя создание котлована (рис. 8). Схема перемещения машины – челночная: движение вперед под нагрузкой (зарезание грунта, волочение (транспортировка) грунта и отсыпка грунта), движение назад без нагрузки на исходную точку.
Объект испытаний – трактор D14 с бульдозерным оборудованием. Варианты алгоритма управления: 1 – установка постоянной частоты вращения коленвала ДВС, 200 р/с; 2 – подключение автоматической системы совместного регулирования ДВС и ГОП. Длительность испытаний – 1,5 часа для каждого алгоритма управления.
Объем выработанного материала за цикл оценивался с использованием нивелира в 5 точках путем замера высот рельефа до и после испытаний (рис. 9).
Для удобства анализа полученные результаты всех циклов испытаний сведены в табл. 2 и 3.

Рис. 8. Котлованы в табл. 2 и 3: 1 – слева, 2 – справа Fig. 8. Pits in tables 2 and 3: 1 – left, 2 – right
рельеф местности до испытаний

рельеф местности после испытаний

Рис. 9. Оценка объема выработанного материала за цикл Fig. 9. Estimation of the volume of produced material per cycle
Результаты испытаний
Test results
Таблица 2
Table 2
|
№ котлована |
Время цикла, мин |
Объем выработки грунта, м 3 |
Частота вращения коленвала ДВС, р/с |
Расход топлива, л |
Удельный расход топлива, л/м 3 |
|
1 |
30 |
59,8 |
200 |
12 |
0,2 |
|
2 |
30 |
31,6 |
200 |
11 |
0,35 |
|
1 |
60 |
39,5 |
200 |
18 |
0,46 |
|
2 |
60 |
82 |
Var* |
19 |
0,23 |
* Частота вращения коленвала ДВС меняется от внешней нагрузки
Анализ представленных данных табл. 2 показал, что при малой загрузке двигателя большее влияние на часовой расход топлива оказывает частота вращения двигателя, объем выработки влияет не так заметно. Но как только мы увеличиваем загрузку двигателя или начинаем регулировать частоту вращения в зависимости от нагрузки при двойном объеме выработки, прирост топлива в сравнении с менее нагруженным циклом составил всего 1 литр.
Обработкой данных с блока управления установлено, что среднее значение частоты вращения коленчатого вала ДВС с АС управления подачей топлива составило 150 р/с.
Аппроксимация кривой мощности на режиме 200 р/с позволила приближенно оценить загрузку двигателя при разработке котлована с выполнением операций зарезания, волочения (транспортировки) и отсыпки грунта. На участках 1–2–3–4 (рис. 9) среднеарифметическая мощность составила 70 кВт и только на коротком участке котлована 4–5 высокая частота вращения коленвала двигателя является оправданной, так как двигатель выходит на пиковые значения мощности в 172 кВт.
Полученные экспериментальные данные удовлетворительно согласуются с теоретическими выкладками, полученными ранее. Работа двигателя при частоте вращения 200 р/с и мощностью 70 кВт попадает в неэффективный диапазон работы (см. табл. 1).
Анализ данных табл. 3 показал, что использование системы автоматического управления частотой вращения коленвала двигателя позволяет экономить топливо до 15 % в сравнении с традиционной работой двигателя при постоянных 200 р/с. Обобщающие результаты испытаний приведены в табл. 4.
Таблица 3
Результаты испытаний
Table 3
Test results
|
№ котлована |
Время цикла, мин |
Объем выработки грунта, м 3 |
Частота вращения ДВС, р/с |
Расход топлива, л |
Удельный расход топлива, л/м 3 |
|
1 |
90 |
135,5 |
200 |
42 |
0,31 |
|
2 |
90 |
145,7 |
Var* |
38 |
0,26 |
* Частота вращения коленвала ДВС меняется от внешней нагрузки
Таблица 4
Обобщающие результаты испытаний
Table 4
Summary of test results
|
Показатель |
Традиционное управление МТУ |
Управление с подключение АС совместного управления ДВС и ГОП |
Изменение показателя, % |
|
Объём перемещенного грун- 3 та, м |
135,5 |
145,7 |
+7 |
|
Расход топлива, л |
42 |
38 |
–10 |
|
Удельный расход топлива, г/м 3 |
0,31 |
0,26 |
–15 |
|
Средняя скорость вращения коленчатого вала ДВС, р/с |
200 |
155 |
–23 |
Выводы
-
1. Разработана математическая модель управления МТУ промышленного трактора с гидростатической трансмиссией, обеспечивающая выполнение работы по перемещению грунта при минимальном расходе топлива.
-
2. Отработан в математической модели алгоритм одновременного управления подачей топлива ДВС и объёмов мотора и насоса ГОП в процессе бульдозирования.
-
3. Расчетная экономия топлива по сравнению с традиционным раздельным независимым управлением ДВС и ГОП составила 15 %.
-
4. Проведены натурные испытания трактора-бульдозера D14 производства завода «ДСТ-УРАЛ» с разработанной системой автоматического управления и с традиционной системой управления МТУ. Положительный эффект выявлен по четырем показателям: удельная экономия топлива составила 15 %, повышение производительности бульдозера составило 7 %, средняя частота вращения коленвала ДВС снизилась на 23 % (что приблизительно на эти же 23 % повышает ресурс ДВС), абсолютный расхода топлива в пересчете на 8-часовую смену снизился на 21 литр. Экономический эффект от внедрения разработанной АС только по топливу (в современных ценах) составляет 1200 руб./смену.
-
5. Достоверность математической модели трактора-бульдозера, на базе которой реализован в среде программирования CoDeSys алгоритм управления МТУ, подтверждена натурными испытаниями трактора-бульдозера D14 производства завода «ДСТ-УРАЛ».
-
6. По результатам исследований получен патент на изобретение.
Список литературы Повышение эффективности промышленного трактора-бульдозера совершенствованием алгоритма управления моторно-трансмиссионной установкой. Результаты математического моделирования и полевых испытаний
- Engines for every application: Liebherr showcases innovative solutions at Bauma. URL: https://www.liebherr.com/en/rus/latest-news/news-press-releases/detail/engines-for-every-application-liebherr-showcases-innovative-solutions-at-bauma.html (дата обращения 31.10.2023)
- Power Control of Diesel Engine-Generator Set Subject to Emission Constraints. URL: https://scholar.uwindsor.ca/cgi/viewcontent.cgi?article=6356&context=etd (дата обращения 31.10.2023)
- Transmission-Torque Control for Gear Shifting with Engine Control. URL: https://www.jstor. org/stable/44730754?typeAccessWorkflow=login (дата обращения 31.10.2023)
- Vehicle engine torque control with engine drag control mode. URL: https://patents. google.com/patent/US6535809B1/en (дата обращения 31.10.2023)
- Research on Torque Control Distribution between Motor and Engine in P2.5 Hybrid Vehicle. URL: https://iopscience.iop.org/article/10.1088/1742-6596/1885/4/042005/pdf (дата обращения 31.10.2023)
- Model predictive control of automotive powertrains. URL: https://ieeexplore.ieee.org/document/ 4738740/authors#authors (дата обращения 31.10.2023)
- Бульдозер D20. URL: https://tm10.ru/catalog/buld18/gst20/ (дата обращения 31.10.2023)
- Официальный сайт «ДСТ-УРАЛ» URL: https://tm10.ru/ (дата обращения 31.10.2023)
- Патент на изобретение № 2783552 Способ и устройство управления моторно-трансмиссионной установкой промышленного трактора с бесступенчатой трансмиссией / А.А. Танин-Шахов, С.В. Кондаков, А.Е. Горелый, Е.И. Вансович, С.А. Растрыгин, О.О. Павловская, Г.В. Ломакин, приоритет от 25 мая 2022. Опубликован 14 ноября 2022.
- Чобиток В.А. Теория движения танков и БМП: учебник. М.: Военное издательство, 1984. 263 с.
- Кондаков С.В., Павловская О.О. Интеллектуальная бесступенчатая трансмиссия – регулятор расхода топлива ДВС и крутящего момента ведущих колёс // Вестник машиностроения. 2013. № 7. С. 3–11.
- Гомберг Б.Н., Кондаков С.В., Носенко Л.С., Павловская О.О. Имитационное моделирование движения быстроходной гусеничной машины с электрической трансмиссией // Вестник ЮУрГУ. Серия «Энергетика». 2012. Вып. 18. № 37 (296). С. 73–81.
- Neumann V. Tracked vehicle analysis with simulation technologies support // University of de-fence. Brno. 2014. Vol. 2. P. 20–23.
- Zhai W., Wang K., Cai C. Fundamentals of vehicle–track coupled dynamics.// Vehicle System Dynamics. 2009. Vol. 47. P. 1349–1376. DOI:10.1080/004223110802621561
- Sojka M., Cornak S. Tracked vehicle movement modelling // University of Defence in Brno. 2018. P. 2098–2103. DOI: 10.22616/ERDev2018.17.N358.
- Kojima Sh., Ohno K., Suzuki T., Westfechtel Th., Okada Y., Tadokoro S. Motion control of tracked vehicle based on contact force model // International Conference on Intelligent Robots and Systems, South Korea, 2016. P. 1177–1183. DOI: 101109/IROS.2016.7759198.
- Холодов А.М. Основы динамики землеройно-транспортных машин. М.: Машиностроение, 1968. 156 с.
- Кондаков С.В., Довжик В.Л., Злотник М.И. Влияние динамики нагружения на выбор параметров моторно-трансмиссионной установки промышленного трактора // Тракторы и сельхоз-машины. 1988. № 1. С. 17–20.
- Гинзбург Ю.В., Швед А.И., Парфенов А.П. Промышленные тракторы. М.: Машиностроение, 1986. 293 с.
- Двигатели внутреннего сгорания: Теория поршневых и комбинированных двигателей: учебник для втузов / Д.Н. Вырубов, Н.А. Иващенко, В.И. Ивин и др.; под ред. А.С. Орлина, М.Г. Круглова. М.: Машиностроение, 1983. 372 с.
