Повышение эффективности работы машинно-тракторного агрегата мехатронной системой рулевого управления

Автор: А.И. Азнагуловов, А.В. Линенко, В.В. Лукьянов
Журнал: Агротехника и энергообеспечение @agrotech-orel
Рубрика: Технологии, машины и оборудование для агропромышленного комплекса
Статья в выпуске: 4 (49), 2025 года.
Бесплатный доступ
В данной работе представлена разработка и внедрение мехатронной системы рулевого управления для параллельного вождения машинно-тракторным агрегатом. Система включает электропривод, датчики наклона и угла поворота колес, спутниковый навигационный модуль и программное обеспечение для автоматического управления движением МТА по заданному курсу. Проведены испытания системы при внесении жидких минеральных удобрений на озимой пшенице, что позволило оценить её эффективность. Результаты показали увеличение урожайности на 8,5%, снижение издержек и повышение точности выполнения операции по сравнению с традиционными методами. Внедрение автоматизированной системы способствует повышению производительности труда, снижению утомляемости оператора и оптимизации расхода ресурсов, что делает её актуальной для отечественного агропромышленного комплекса.
Параллельное вождение, мехатронная система, точное земледелие, машинно-тракторный агрегат
Короткий адрес: https://sciup.org/147252893
IDR: 147252893 | УДК: 629.3.07
Increasing the efficiency of a machine-tractor unit with a mechatronic steering system
This paper presents the development and implementation of a mechatronic steering system for the parallel steering of a machine-tractor unit. The system includes an electric drive, wheel tilt and angle sensors, a satellite navigation module, and software for automatic control of the MTU along a specified course. The system was tested during liquid fertilizer application to winter wheat, allowing for an evaluation of its effectiveness. The results showed an increase in yield to 2.55 t/ha, a reduction in costs, and improved accuracy compared to traditional methods. The implementation of the automated system contributes to increased productivity, reduced operator fatigue, and optimized resource consumption, making it relevant for the domestic agro-industrial complex.
Текст научной статьи Повышение эффективности работы машинно-тракторного агрегата мехатронной системой рулевого управления
Наряду с этим, применение зарубежных систем автоматического управления движением МТА, в частности систем подруливания, на отечественной сельскохозяйственной технике затруднено вследствие несогласованности конструктивных параметров, высокой стоимости и зависимости от зарубежных сервисов (возможность удаленного отключения) [1].
Существующие отечественные системы параллельного вождения позволяют машинисту-механизатору управлять движением по курсоуказателю (агронавигатору), однако отсутствуют системы, обеспечивающие движение колесных машин без участия машиниста-механизатора [8]. С учетом этого разработка отечественных систем параллельного вождения колесных машин в агропромышленном комплексе является актуальной задачей.
Целью исследования является повышение эффективности выполнения 226 Агротехника и энергообеспечение. – 2025. – № 4 (49)
сельскохозяйственных операций путем разработки и применения мехатронной системы рулевого управления для параллельного вождения машинно-тракторным агрегатом. Задачей исследования является определение эффективности мехатронной системы мехатронной системы рулевого управления.
Условия, материалы и методы.
Структурная схема разработанной мехатронной системы рулевого управления состоит из следующих элементов: электропривод подруливающего устройства, датчики наклона и угла поворота колес, приёмник GPS/ГЛОНАСС, программы управления МТА [2,5,7].
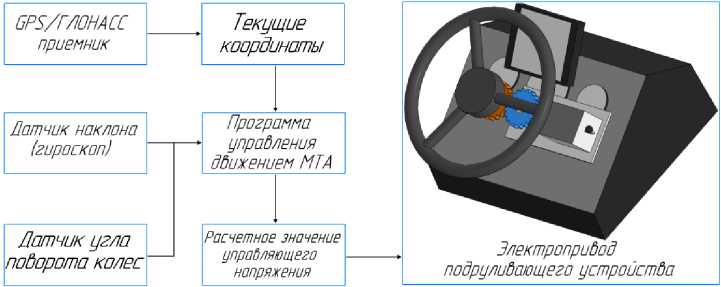
Рисунок 1 - Структурная схема системы параллельного вождения МТА
Алгоритм работы выполняется в следующей последовательности: сначала устанавливается маршрут, после чего МТА начинает движение, и система непрерывно осуществляет следующие действия. Сигналы со спутников принимаются GPS/ ГЛОНАСС – приёмником (4) и передаются в программу управления движением МТА, расположенную в электронном блоке управления (2) (рисунок 2).

Рисунок 2 - Мехатронная система рулевого управления для параллельного вождения МТА
Сигнал с датчика угла поворота управляемых колес (3) идёт на аналого-цифровой преобразователь (АЦП), затем в программу управления движением МТА. На их основании программа вычисляет скорость, направление движения, величину отклонения от задаваемой траектории, а затем, по закону управления движением реализует маневры приближения текущей траектории к необходимой. При этом генерируются сигналы, которые пройдя через цифро-аналоговый преобразователь (ЦАП), в виде напряжения поступают на электропривод руля (1) на базе электродвигателя постоянного тока с рабочим напряжением 12 В, который поворачивает рулевое колесо МТА на необходимый угол посредством зубчатой передачи [2,4]. Такая система обеспечивает более высокую точность движения по курсу без вмешательства оператора.
Для определения эффективности мехатронной системы была произведена одна из наиболее распространенных сельскохозяйственных операций, требующая высокой точности – внесение жидких минеральных удобрений (ЖМУ).
Почва опытного участка – чернозем выщелоченный. Испытания проводились на озимой пшенице с внесением ЖМУ при помощи опрыскивателя «Заря» с шириной захвата 21м и трактора Беларус 82.1 (Рисунок 3, а).

а) б)
Рисунок 3 – Полевые испытания мехатронной системы а) Внесение ЖМУ (Беларус 82.1+опрыскиватель «Заря»);
б) Варианты опытов на озимой пшенице
Площадь обработки 200 Га, размещение систематическое (рисунок 3, б). В качестве подкормки вносили смешанный с водой Бионекс-Кеми жидкий (NPK 10:10:10, стимулятор роста) производства НВП «Башинком».
Схема внесения ЖМУ:
-
1. Контроль (традиционная технология) NPK 5л/га+200 л воды
-
2. При помощи агрнонавигатора – NPK 5л/га +200 л воды
-
3. При помощи разработанной мехатронной системы рулевого управления МТА – NPK 5л/га +200 л воды
Результаты и обсуждение . Мехатронная система рулевого управления для параллельного вождения МТА повышает количество продуктивных стеблей, длину колоса, массу 1000 зерен, и соответственно увеличивает урожайность пшеницы (таблица 1). Максимальная урожайность озимой пшеницы получена на варианте с разработанной мехатронной системой рулевого управления МТА и составила 2,55 т/га, что больше на 0,2 т/га, чем при внесении удобрений традиционным способом. Применение агронавигатора (курсоуказателя) позволило увеличить урожайность на 0,15 т/га, что показывает преимущества применения современных систем параллельного вождения, но более эффективнее оказалась разработана мехатронная система. Результат обеспечен благодаря наименьшим перекрытиям, количеству пропусков и повышенному вниманию машиниста-механизатора к технологии внесения ввиду отсутствия задачи по поддержанию МТА движения по заданному курсу.
Таблица 1 - Влияние дозы жидких удобрений на урожайность озимой пшеницы
|
Вариант |
Схема опыта |
Урожайность, т/га |
|
1 |
Контроль (традиционная технология) NPK 5л/га+200 л воды |
2,35 |
|
2 |
При помощи агронавигатора NPK 5л/га +200 л воды |
2,5 |
|
3 |
При помощи разработанной мехатронной системы NPK 5л/га +200 л воды |
2,55 |
Благодаря минимальному отклонению стало возможным уменьшить эксплуатационные затраты (удобрения и топливо), снизить утомляемость оператора и увеличить производительность труда (возможность работы в дневное и ночное время, а также в условиях плохой видимости).
Выводы. Себестоимость мехатронной системы рулевого управления для параллельного вождения МТА составляет 184,99 тыс.руб. (в ценах на 01.11.2023г.), а ее применение позволяет сэкономить 42,00 руб с 1 га при пятикратной листовой подкормки ЖМУ, согласно технологической карте возделывания озимой пшеницы. Общий экономический эффект, при годовом условном объеме 1000 га единицы наработки равен 42,00 тыс. руб., а срок окупаемости составит 4,4 года. При этом эксплуатационные затраты снизились на 3,3%, производительность МТА (га/смена) возросла на 7,7% при выполнении сельскохозяйственной операции, а урожайность (т/га) на 8,5%. Повышение эффективности выполнения сельскохозяйственных операций при параллельном вождении МТА мехатронной системой рулевого управления достигается снижением утомляемости оператора и увеличением производительности труда (возможность работы в ночное время, а также в условиях плохой видимости) и уменьшением эксплуатационных затрат.
