Повышение маневренности гусеничного трактора с дифференциальным механизмом поворота путем включения остановочного тормоза отстающего борта при резком изменении кривизны траектории

Автор: Кондаков Сергей Владимирович, Дьяконов Александр Анатольевич, Фдоров Сергей Владимирович, Вансович Егор Иванович
Рубрика: Расчет и конструирование
Статья в выпуске: 4 т.18, 2018 года.
Бесплатный доступ
В данной статье приведены результаты исследования параметров криволинейного движения промышленного гусеничного трактора класса тяги 10 тонн с дифференциальным механизмом поворота. В тяжелых грунтовых условиях и при резком маневрировании гидрообъёмная передача, составляющая основу дифференциального механизма поворота, перегружается по давлению. Авторами предложен и обоснован алгоритм управления поворотом совместным действием гидрообъёмной передачи и остановочного тормоза отстающего борта. При этом включение остановочного тормоза осуществляется методом широтно-импульсной модуляции при наступлении определенных условий, определенных в процессе математического имитационного моделирования. Показано, что включение остановочного тормоза в момент перегрузки гидрообъёмной передачи не является результативным, так же как и включение остановочного тормоза отстающего борта на некоторое время переходного процесса изменения траектории. Смоделировано движение трактора по установившейся криволинейной траектории при включении остановочного тормоза отстающего борта. При этом установлено, что трактор не останавливается, несмотря на противоречивые, в данных условиях, усилия остановочного тормоза и гидрообъёмной передачи. Дело в том, что ГОП не является абсолютно жёстким звеном силовой цепи и при противодействии остановочному тормозу либо сбрасывает рабочую жидкость через предохранительный клапан, либо переходит в генераторный режим. Результаты исследования получены в рамках проекта по созданию высокотехнологичного производства «Разработка бесступенчатого дифференциального механизма поворота со следящей системой управления для внедорожных и дорожно-строительных машин нового поколения» по соглашению № 074-11-2018-006 от 31.05.2018 г. между Министерством науки и высшего образования Российской Федерации и Обществом с ограниченной ответственностью Производственная компания «Ходовые системы» в кооперации с Головным исполнителем НИОКТР - Федеральным государственным автономным образовательным учреждением высшего образования «Южно-Уральский государственный университет (национальный исследовательский университет)».
Гусеничный промышленный трактор, дифференциальный механизм поворота, планетарный механизм, гидродинамический трансформатор крутящего момента, гидрообъёмная передача, траектория, остановочный тормоз
Короткий адрес: https://sciup.org/147231726
IDR: 147231726 | УДК: 629.3.021 | DOI: 10.14529/engin180403
Increasing maneuverability of caterpillar tractors with differential steering mechanisms by activating stopping brakes of lagging sides with an abrupt change in the trajectory curvature
The paper presents a study of curvilinear motion of 10-ton industrial caterpillar tractors with differential steering mechanisms. Hard ground conditions and abrupt maneuvering lead to overpressure of hydrostatic drives, which form the basis of differential steering mechanisms. We proposed and verified an algorithm for steering control by the joint action of the hydrostatic drive and the stopping brake of the lagging side. In this case, the stopping brake is activated by the method of pulse-width modulation under certain conditions determined by mathematical simulation. It was shown that activation of the stopping brake under overloading of the hydrostatic drive is not effective. The same is characteristic of the stopping brake of the lagging side during the transition of trajectory change. We modeled tractor motion along a steady curved trajectory when the stopping brake of the lagging side activates. It was found that the tractor does not stop, despite the conflicting efforts of the stopping brake and hydrostatic drive under these conditions. The problem is that a hydrostatic drive is not an absolutely rigid link in a power circuit and, counteracting to the stopping brake, it either dumps the working fluid through a safety valve or transitions to a generating mode.
Текст научной статьи Повышение маневренности гусеничного трактора с дифференциальным механизмом поворота путем включения остановочного тормоза отстающего борта при резком изменении кривизны траектории
Традиционный механизм поворота (МП) гусеничного трактора – это бортовой фрикцион или двухступенчатый планетарный механизм поворота [1, 2]. На быстроходных гусеничных машинах применяют дифференциальный МП [3, 4]. Главным ограничением такого МП является установочная мощность гидрообъёмной передачи (ГОП) [5].
Современные гусеничные промышленные тракторы агрегатируют бесступенчатыми трансмиссиями, в том числе бортовыми гидростатическими [6], что обеспечивает тракторам качественный рост маневренности и способность выполнять технологические операции при криволинейном движении. Поэтому рынок требует аналогичного повышения маневренности и от тракторов с другими трансмиссиями, например, с гидродинамическими или механическими. Выходом является установка на такие трактора бесступенчатых дифференциальных механизмов поворота [7–9].
Однако проблема с установочной мощностью ГОП остается актуальной и для относительно тихоходных машин. Давления в 40 МПа не хватает для разворота на месте трактора класса 10 т на тяжёлых грунтах. И при входе в поворот на малых скоростях давление превышает 40 МПа и в ГОП открывается предохранительный клапан. Это приводит к снижению интенсивности вхо- да в поворот, к задержке в достижении установившегося радиуса поворота.
Гипотеза: подключать штатные остановочные тормоза в помощь ГОП.
Имеются патенты, предполагающие использование остановочных тормозов (ОТ) отстающего борта для интенсификации входа в поворот, или разгружающие ГОП в повороте [10–12].
На мысль об использовании ОТ для поворота гусеничной машины с дифференциальным гидрообъёмным МП подталкивает представление о поведении дифференциала автомобиля (про-
Рис. 1. Простой дифференциал автомобиля, КП – коробка передач
стой дифференциал как МП гусеничных машин упоминается в литературе [11]). А именно: при замедлении вращения одной из полуосей на величину Δω другая полуось ускоряется на Δω. Схема простого дифференциала приведена на рис. 1.
Дифференциальный МП (рис. 2) обладает таким же свойством. В простом дифференциале замедление отстающего борта можно достичь включением соответствующего бортового ОТ. Вроде бы и в дифференциальном МП по рис.2 можно достичь этого же эффекта. Но, в отличие от простого дифференциала по рис. 1, в дифференциальном МП по рис.2 имеется жесткая кинематическая связь бортов через ГОП – что смущает: не приведет ли включение ОТ к остановке всей машины. Ведь две силовые цепочки к СПМ от ДВС через ГОП и от ОТ подобны двум одновременно включенным передачам в КП.
Для апробации и исследования сформулированной выше гипотезы создана математическая модель движения и управления промышленного трактора с дифференциальным МП [13–19]. Введено понятие момента остановочного тормоза Mt , ко- торый начинает работать в двух уравнениях – для скорости турбины и скорости мотора, в систе-
ме дифференциальных уравнений математической модели [7]:
d го т dT
d ^ M dT
M т -
M гм
( T x 2 + T x 1 + M t ) R вк ( к + 1 ) 1 1
i бп i к к
( T x 2 - T x 1 - M t ) R вк i бп i 5 к
. J 3
J 2
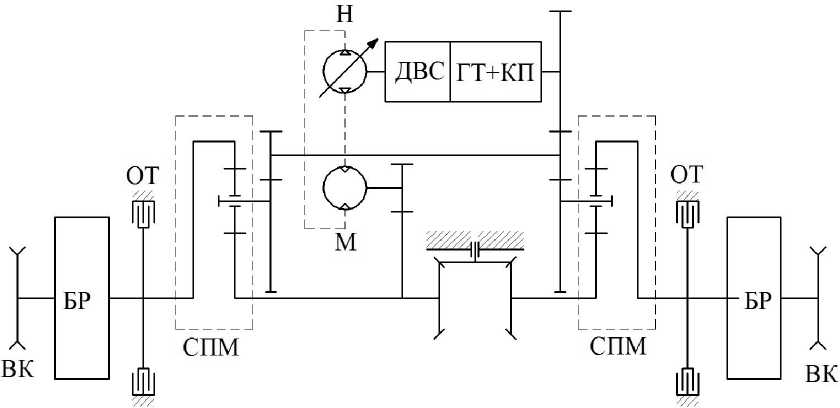
Рис. 2. Двухпоточный дифференциальный МП гусеничной машины. Н – регулируемый насос ГОП; М – нерегулируемый мотор ГОП; ДВС – двигатель внутреннего сгорания; ГТ – гидродинамический трансформатор крутящего момента; КП – коробка передач; СМП – суммирующие планетарные механизмы;
ОТ – остановочные тормоза; БР – бортовые редуктора; ВК – ведущие колеса; ВП – вал подкрутки
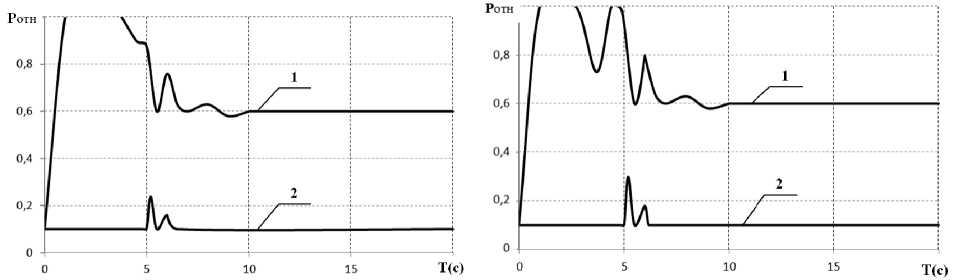
При входе в поворот на малых скоростях, а именно при движении на 1 передаче со скоростью 0,75 м/с появляется перегрузка ГОП по давлению (рис. 3). Перегрузка по давлению длится 2,5 с.
на
Рис. 4. Давление ГОП при входе в поворот 1 передаче и включении ОТ во времени, между
1 и 4 с: 1 – магистраль нагнетания; 2 – магистраль всасывания
Рис. 3. Относительное давление ГОП при входе в поворот на 1 передаче: 1 – магистраль нагнетания;
2 – магистраль всасывания
На рис. 4 показан результат включения ОТ между 1 и 4 с: давление ГОП снизилось, но поздно по времени, перегрузка по давлению в первую секунду не преодолено. Те м не менее, положительный эффект по входу в поворот конечно есть: радиус в 2 м достигается раньше на 1,5 с (рис. 5).
Следует прокомментировать повторный скачок давления после t = 3 с по рис. 4. ОТ продолжает быть включенным, а давление ГОП сначала уменьшается, потом расте т и снова достигает предела. Получается, что включение ОТ в конкретный период времени неэффективен по двум причинам: во-первых, имеет место всплеск давления между 3 и 5 с, опять до макси м ума, во-вторых, в режиме реального времени контроллер не сможет определить интервал между 3 с и 5 с, примененный в математической модели, работающ е й в нереальном (виртуальном) времени. Для реальных условий работы трактора необходимо выявить параметр, или п араметры, которые может пользовать контроллер, формирующий команду на включение-выключение ОТ.
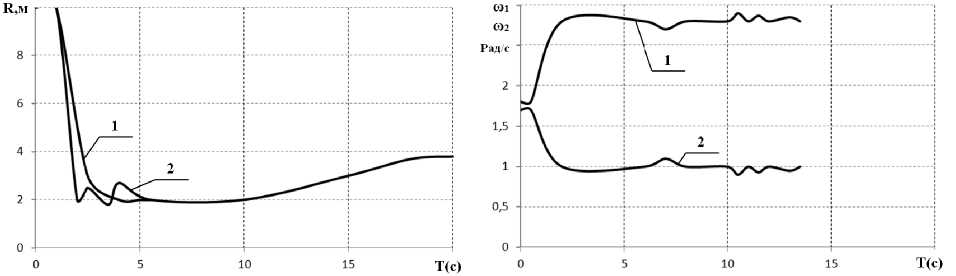
Рис. 5. Радиус поворота, м: 1 – без подключения ОТ; Рис. 6. Скорости по бортам, рад/с: 1 – забегающий
2 – с подключение ОТ борт; 2 – отстающий борт
На рис. 7 показана первая производная давления Г О П во времени при подключении ОТ в определенный период входа в поворот (по рис. 4). Видно, что скорость измен е ния давления находится в широких пределах – от 60МПа/с до –30 МПа/с . И тогда, когда давление резко п а дает, необходимо ОТ отключать. Эта информация позволила о пределить величину управляющего параметр – скорости изменения давления ГОП. Предложен и апробирован следующий алгоритм включения ОТ: держать ОТ во включенном состоянии тогда, когда скорость изменения давления ГОП больше –0,5 МПа/с.
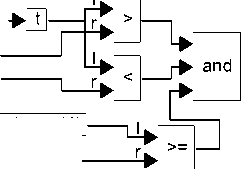
На рис. 8 показана реализация в среде программи р ования VISSIM алгор и тма управления ОТ по скорости изменения давления в магистрали нагнетания ГОП. В этом алгоритме не участвует время вообще. Параметр, который управляет ОТ – ск о рость изменения дав л ения ГОП. Логическая операция, формирующая команду на выключение ОТ: если скорость изменения давления меньше –0,5 МПа/с.
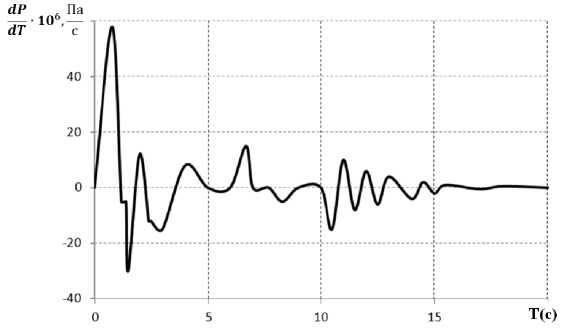
Рис. 7. Скорость изменения давления в магистрали нагнетания ГОП, соответствующий графику давления ГОП на рис. 3
>1 gop/dt
0000]-
b t f
rge
•[ Fbrake ]—
Рис. 8. Алгоритм включения-выключения ОТ по скорости изменения давления
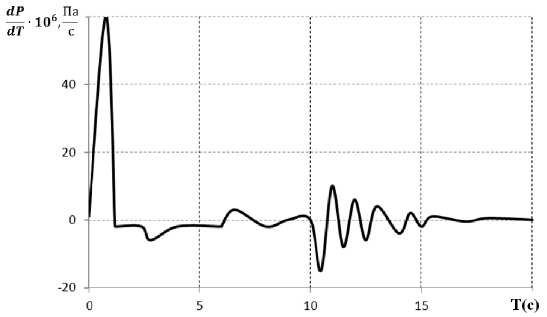
Рис. 9. Скорость изменения давления ГОП после внедрения
нового алгоритма
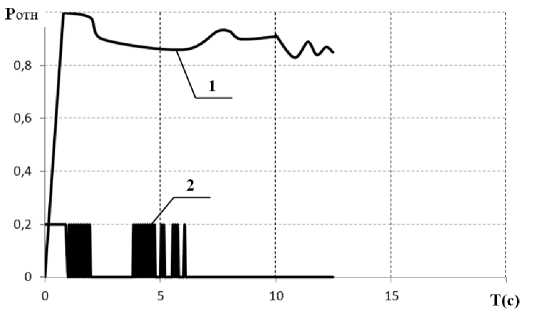
Рис. 10. График изменения во времени давления ГОП (1) и момента остановочного тормоза (2)
На рис. 9 и 10 показан результат применения а л горитма по скорости и зменения давления и по результирующему давлению ГОП, а также зафиксированы эпизоды включения ОТ во времени.
Анализ графиков на рис. 10 показывает, что ОТ включен не постоянно. Но полож и тельный результат достигнут – давление ГОП выходит на предельное значение всего н а 0,5 с и не возвращается на клапан снова, как было на рис. 4.
Исследование поведения гусеничной машины при включении ОТ при установившемся повороте. Попытка проверить поведение ГОП и машины в целом при включении ОТ с большим моментом показала переброс давления между магистралями (рис. 11), а вот остановки ма ш ины не получается – скорости по бортам на рис. 12.
Далее приведены результаты моделирования включения ОТ в установившемся повороте. Воспользуемся уравнением кинематических связей (УКС) планетарного меха н изма [20]:
Список литературы Повышение маневренности гусеничного трактора с дифференциальным механизмом поворота путем включения остановочного тормоза отстающего борта при резком изменении кривизны траектории
- Злотник, М.И. Трансмиссии современных промышленных тракторов / М.И. Злотник, И.С. Кавьяров. - М.: Машиностроение, 1971. - 248 с.
- Гинзбург Ю.В. Промышленные тракторы / Ю.В. Гинзбург, А.И. Швед, А.П. Парфенов. - М.: Машиностроение, 1986. - 293 с.
- Военные гусеничные машины: учеб.: в 4 т. Т. 1: Устройство. Кн. 2. - М.: МГТУ им. Н.Э. Баумана, 1990. - 336 с.
- Теория движения танков и БМП: учеб. - М.: Военное изд-во, 1984. - 263 с.
- Кондаков, С.В. Повышение подвижности быстроходной гусеничной машины путём автоматизации системы управления криволинейным движением: моногр. / С.В. Кондаков. - Челябинск. Издат. центр ЮУрГУ, 2009. - 108 с.
- https://www.tm10.ru.
- Никитин, А.О. Теория танка / А.О. Никитин, Л.В. Сергеев. - М.: Издание Академии Бронетанковых войск, 1962. - 584 с.
- Объёмные гидромеханические трансмиссии / под ред. Е.С. Кисточкина. - Л.: Машиностроение, 1987. - 256 с.
- Петров, В.А. Гидрообъёмные трансмиссии транспортных машин / В.А. Петров. - М.: Машиностроение, 1988. - 248 с.
- Патент № 2031808 С1 В 62 D 11/18, D60 R 17/10 Российская Федерация. Трансмиссия гусеничной машины / В.Б. Бескупский, Г.В. Мазепа, А.А. Моров, В.И. Поткин, В.М. Дудаков; заявитель и патентообладатель Конструкторское бюро транспортного машиностроения. - № 5019529/27; заявл. 29.12.1991; опубл. 27.03.1995.
- А.с. 1602791 А1 кл. В 62 D 11/18 Трансмиссия гусеничной машины / В.М. Балдаев, В.В. Кудрявцев.
- Патент № 2258623 С1 кл. В 62 D 11/18, 55/00. Российская Федерация. Трансмиссия гусеничной машины / С.В. Надеждин, В.Ф. Васильченков, В.С. Гоняев; заявитель и патентообладатель Рязанский автомобильный институт. - № 2003133307/11, заявл. 14.11.2003; опубл. 20.08.2005, Бюл. № 23.
- Конструкция и расчет танков и БМП: учеб. - М.: Военное изд-во, 1984. - 375 с.
- Kondakov, S.V. Models of the Turn Resistance for High-Speed Caterpillar Vehicles / S.V. Kondakov, D.V. Kharlapanov, E.I. Vansovich // Russian Engineering Research. - 2016. - Vol. 36, No. 1. - P. 1-5.
- Kondakov, S.V. Turn Behavior of Energy-Efficient High-Speed Tracked Vehicle with a Smart Electrical Transmission / S.V. Kondakov, O.O. Pavlovskaya, N.K. Goryaev // Russian Engineering Research. - 2015. - Vol. 35, No. 2. - P. 97-101.
- Кондаков, С.В. Автоматическое управление движением гусеничной машины с интеллектуальной гидростатической трансмиссией при целеуказании в координатах GPS / С.В. Кондаков, Н.В. Дубровский // Тракторы и сельхозмашины. - 2018. - № 2. - C. 34-40.
- Kondakov, S.V. Mathematic Modeling of Self-Propelled Unmanned Tracked Platform with Hydrostatic Transmission / S.V. Kondakov, E.A. Gorely, A.G. Savinovsky // PROENG397584. Procide Engineering. - 2017. - Vol. 206. - P. 1546-1551.
- Pavlovskaya, O.O. Modelling Human Operator Driving High-Speed Tracked Vehicle / O.O. Pavlovskaya, S.V. Kondakov, A.A. Andreeva // IEEE Xplore Digital Library, 2017. - P. 1-6.
- DOI: 10.1109/ICIEAM.2017.8076151
- Kondakov S.V., Dyakonov A.A., Dubrovskiy N.V. Simulation modeling of the curvilinear motion of an industrial tractor with a differential rotation mechanism and tracking trajectory stabilization system. MATEC Web of Conferences. - 2018. - Vol. 224. - 02098.
- DOI: 10.1051/matecconf/201822402098
- Филичкин, Н.В. Анализ планетарных коробок передач транспортных и тяговых машин: учеб. пособие / Н.В. Филичкин. - Челябинск: Изд-во ЮУрГУ, 2005. - 175 с.
