Повышение пропускной способности на регулируемых пересечениях за счет оптимизации скоростных режимов транспортных потоков

Автор: Фадина О.С., Шепелев В.Д., Варворкин М.А., Плюхин Л.Э.
Рубрика: Краткие сообщения
Статья в выпуске: 3 т.17, 2023 года.
Бесплатный доступ
В данном исследовании представлен детальный анализ параметров транспортного потока на регулируемых перекрестках с применением машинного зрения. На основе обработки видеопотоков обученной и оптимизированной нейронной сетью (YOLOv4) был проведен анализ данных по оценке пропускной способности полос с разрешенным движением только прямо, собраны характеристики перекрестков, а также разработана математическая модель расчета средней скорости групповых автомобилей для обеспечения безостановочного проезда регулируемого пересечения при координированном управлении дорожным движением. Были получены зависимости средних скоростей лидирующего автомобиля от времени разъезда очереди транспортных средств. Предложенная методика позволяет повысить пропускную способность регулируемых перекрестков до 12 % и сократить время задержки транспортных средств до 20 %.
Нейронные сети, пропускная способность перекрестка, поток насыщения, скорость, интеллектуальные транспортные системы, очередь транспортных средств, координированное управление транспортными потоками, транспортный поток, дорожное движение, пересечение, время покидания очереди транспортных средств
Короткий адрес: https://sciup.org/147241723
IDR: 147241723 | УДК: 656.02 | DOI: 10.14529/em230317
Increasing the throughput at regulated intersections by optimizing the speed modes of traffic flows
This study presents a detailed analysis of the traffic flow parameters at regulated intersections using machine vision. Based on the processing of video streams by a trained and optimized neural network (YOLOv4), data analysis was carried out to assess the capacity of lanes with traffic permitted only in a straight line, the characteristics of intersections were collected, and a mathematical model was developed for calculating the average speed of group cars to ensure non-stop passage of a regulated intersection with coordinated traffic management. The dependences of the average speeds of the leading car on the time of departure from the queue of vehicles were obtained. The proposed method makes it possible to increase the throughput of regulated intersections by up to 12 % and reduce the delay time of vehicles by up to 20 %.
Текст краткого сообщения Повышение пропускной способности на регулируемых пересечениях за счет оптимизации скоростных режимов транспортных потоков
Рост количества автотранспорта и транспортных перемещений населения приводит к увеличению интенсивности движения, снижению безопасности дорожного движения и пропускной способности дорог. Ускорение, замедление, простои транспортных средств (ТС) на запрещающий сигнал светофора, при проезде пересечений создают увеличение потерь времени в поездке, что существенно снижает качество жизни населения. При расчете пропускной способности учитываются такие параметры и характеристики, как поток насыщения, эффективная длительность фазы регулирования и время цикла [1]. На поток насыщения влияют ширина полосы движения, состав транспортного потока, маршрутные транспортные средства, тип территории, правые и левые повороты и т. д. В работе авторов [2] проведено исследование корреляции между пропускной способностью перекрестков автомагистралей и параметрами трафика. Метод увеличения пропускной способности на основе разделения перекрестного трафика на несколько подпотоков исследован в работе [3]. В исследовании [4] авторы использовали данные автоматических счетчиков трафика и среднегодовые суточные данные ручного подсчета для повышения пропускной способности.
Одним из эффективных методов повышения пропускной способности улично-дорожной сети является координированное регулирование движения автотранспорта [5, 6]. Использование данного метода позволяет, за счет повышения средней скорости и сокращения остановок транспорта у регулируемых перекрестков, снизить транспортные потери с минимальными финансовыми затратами. В своем исследовании авторы [7, 8] разработали методологию координации сигналов и оптимально скоординированную работу светофоров для сокращения времени в движении транспортных средств. Современные исследования посвящены определению влияния длины очереди с применением различных детекторов на пропускную способность регулируемого перекрестка [9, 10].
Существуют работы с похожими исследованиями [11, 12], авторы которых разработали алгоритмы планирования скорости на основе информации о сигналах светофора. Изучили роль ведущего транспортного средства, показали решающую роль времени начала движения и типа перво- го транспортного средства на исследуемых перекрестках.
В дополнение к приведенным выше работам в нашем исследовании предлагается новый подход к снижению транспортных задержек за счет организации безостановочного проезда регулируемого пересечения групповыми автомобилями. Разработанная математическая модель учитывает как количество транспортных средств в очереди, так и ее структуру, а также индивидуальные характеристики перекрестка.
Теория и методы
В ходе исследования были собраны данные с регулируемых перекрестков в г. Челябинск с применением нейронной сети YOLOv4 с целью интерпретации данных о параметрах движения транспортных средств. На каждом пересечении были выбраны полосы движения, соответствующие движению автотранспортных средств только прямо. При этом фиксировались как геометрические параметры этих полос, так и вся структура перекрёстков. Было выбрано двадцать две таких полосы с 10 крупных городских перекрёстков (табл. 1). Исследования проводились в беззаторо-вое время, с количеством автомобилей в очереди от 6 до 13 единиц.
При оценке практической пропускной способности в конкретных дорожных условиях Федеральное дорожное агентство (Росавтодор) [13] рекомендует использовать уравнение:
Р = β · Р max , (1) где β – итоговый коэффициент снижения пропускной способности, равный произведению частных коэффициентов β = β 1 · β 2 · β 3 ·...· β 17; Pmax – максимальная практическая пропускная способность, прив. ед./ч.
Снижение максимальной пропускной способности происходит в результате влияния различных факторов. При расчете пропускной способности необходимо также учитывать геометрические характеристики пересечения, так как от них зависит скорость и ускорение транспортных средств при проезде пересечения.
Набор исходных переменных из видеопотока (рис. 1), используемых в исследовании, а также вычисляемые переменные представлены в табл. 1.
Из данных, представленных в табл. 2, видно, что у каждого пересечения различаются параметры и характеристики, что в свою очередь влияет на
Таблица 1
Исходные переменные
|
№ п/п |
Переменная |
Единица измерения |
|
1 |
L – длина пересекаемой проезжей части |
м |
|
2 |
Тср – среднее время проезда перекрестка ТС |
с |
|
3 |
а – среднее ускорение ТС при проезде пересечения |
м/с2 |
|
4 |
V – средняя скорость ТС при проезде пересечения |
м/с, км/ч |
|
5 |
Р – практическая пропускная способность |
прив. ед./ч |
|
6 |
g ej – эффективная длительность фазы регулирования |
с |
|
7 |
lp – ширина полосы |
м |
|
8 |
С – время цикла |
с |
|
9 |
l s – длина от стоп-линии до пересекаемой проезжей части |
м |
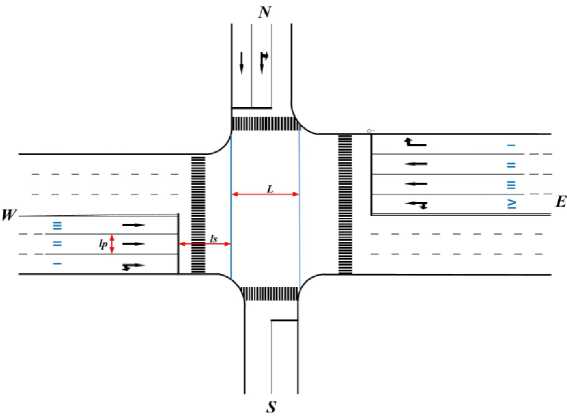
Рис. 1. Схема перекрестка
Таблица 2
Характеристики исследуемых пересечений
Для сравнения пропускной способности на пересечении эффективная длительность фазы была принята 20 с (рис. 3), чтобы все перекрестки были исследованы в равных условиях.
На приведенных направлениях перекрестков были выполнены расчеты теоретической и практической пропускной способности, из которых можно сделать вывод, что при наличии в очереди ТС различных категорий фактическая пропускная способность отличается от практической до 30 % (рис. 4).
Выявлено, что на пропускную способность пересечения существенное влияние оказывает место, которое занимает в очереди ТС другого типа, что не учитывается в формуле практической пропускной способности (табл. 3).
Также было проведено исследование скорости проезда пересечения в зависимости от позиции ТС в очереди и условий движения с остановкой перед стоп-линией или без остановки (свободный проезд пересечения) (рис. 5).
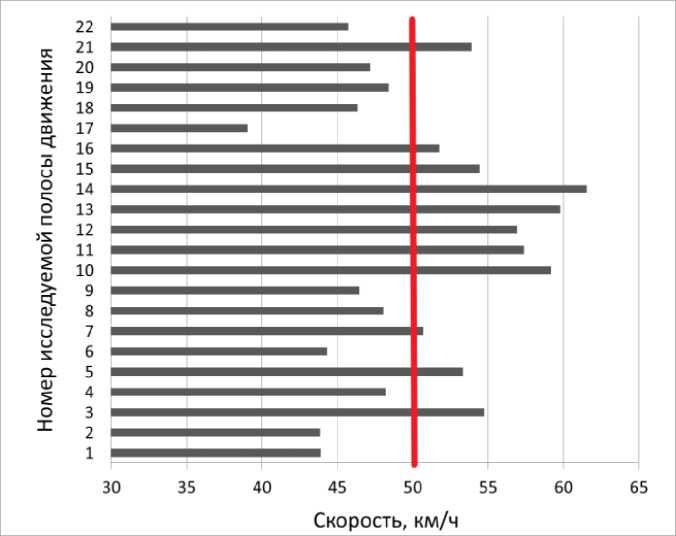
Рис. 2. Средняя скорость проезда перекрестков ТС, км/ч
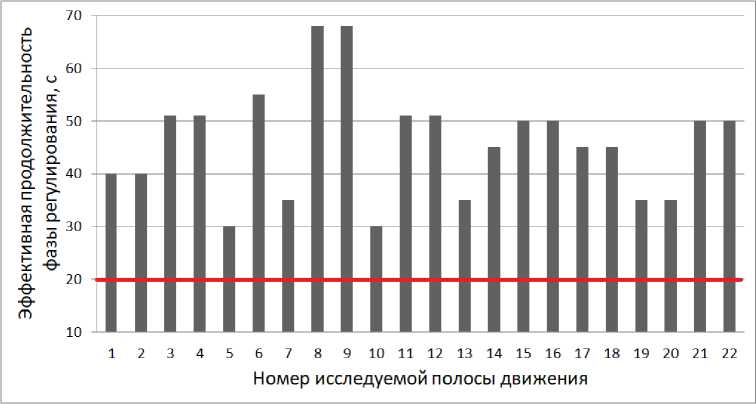
Рис. 3. Эффективная длительность фазы регулирования
Таблица 3
Пропускная способность пересечения при анализируемой длительности фазы регулирования (20 с)
|
Номер такта |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
|
|
Количество физ. ед. ТС |
8 |
9 |
10 |
8 |
8 |
10 |
9 |
8 |
8 |
7 |
7 |
8 |
9 |
8 |
12 |
7 |
8 |
6 |
6 |
8 |
|
|
категория ТС |
коэф. пр |
||||||||||||||||||||
|
car |
1 |
5 |
8 |
9 |
6 |
6 |
8 |
8 |
5 |
7 |
5 |
4 |
5 |
7 |
7 |
11 |
6 |
7 |
5 |
5 |
6 |
|
mini_bus, mini_truck |
1,5 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
|||||||||||||
|
middle_bus, middle_truck |
2 |
1 |
|||||||||||||||||||
|
bus |
2,5 |
2 |
1 |
1 |
2 |
1 |
2 |
1 |
2 |
2 |
2 |
2 |
1 |
1 |
1 |
||||||
|
trolleybus, truck |
3 |
1 |
|||||||||||||||||||
|
road_train |
4 |
1 |
1 |
1 |
1 |
||||||||||||||||
|
Практ. ПС, пр.ед./ч |
6,5 |
7,9 |
8 |
7 |
7 |
7,4 |
7,9 |
6,5 |
7,9 |
7 |
6 |
6,5 |
7,3 |
7,9 |
8,2 |
7,7 |
7,9 |
7,7 |
7,7 |
7 |
|
|
Факт. ПС, пр.ед./ч |
<л |
<л о |
<л |
-н |
О |
m |
<л о |
<л |
о |
о |
<л о |
<л |
-Н |
<л о? |
m |
О |
-н |
О\ |
О\ |
о |
|
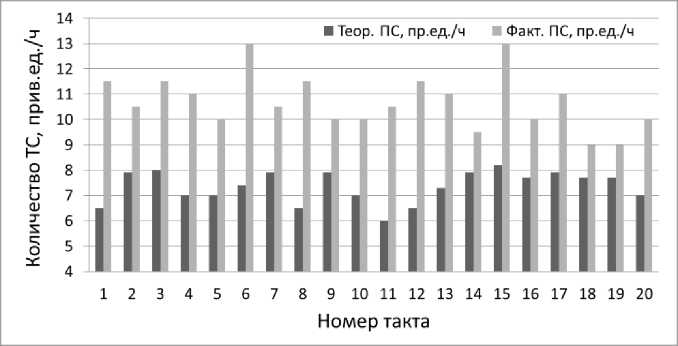
Рис. 4. Пропускная способность регулируемого пересечения за 20 с
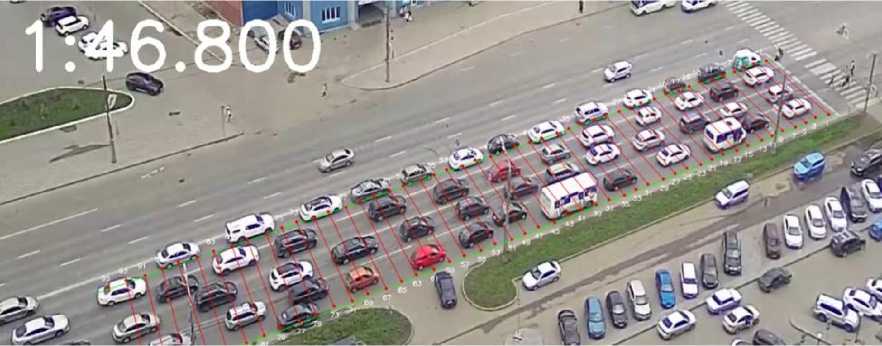
Рис. 5. Измерение динамики транспортного потока (YOLOv4)
Приведенные выше исследования показывают, что на пропускную способность и способы ее оценки влияет порядок формирования очереди разнородными транспортными средствами, который необходимо учитывать при ее расчёте. Вне-групповые транспортные средства, подъезжающие к перекрестку на запрещающий сигнал светофора, создают очередь, которая мешает безостановочному проезду групповых транспортных средств, прибывающих с предыдущего перекрестка. Остановка групповых ТС перед перекрестком, вызванная наличием очереди, снижает пропускную способность до 20 % [15]. Поэтому разрешающий сигнал светофора должен включаться с некоторым опережением. В принятых методиках длительность опережения определяют по среднему числу внегрупповых автомобилей, стоящих на одной из полос перед перекрестком в ожидании разрешающего сигнала, из расчета 2 с на один внегрупповой автомобиль [16]. Такой подход не позволяет обеспечить эффективную пропускную способность на регулируемом перекрестке, так как, с одной стороны, недостаточно времени работы разрешаюше-го сигнала светофора для проезда очереди ТС, а при отсутствии ТС увеличивается время задержки ТС в поперечном направлении.
Для обеспечения непрерывного движения групповых автомобилей предлагается заранее регулировать среднюю скорость групповых ТС до необходимого показателя по мере приближения к перекрестку с учетом параметров очереди вне-групповых ТС. Регулирование скорости групповых ТС на перегоне позволит избежать их остановки из-за наличия очереди и повысить скорость проезда регулируемого перекрестка.
Чтобы определить оптимальную скорость, необходимо учесть время, которое требуется транс- портному средству для проезда от стоп-линии до дальней границы пересекаемой проезжей части. Это расстояние можно рассчитать, учитывая пара- метры дороги и скорость движения транспортного средства. Кроме того, важно учесть время, которое занимает сдвиг разрешающего сигнала светофора и время, необходимое для координированного движения между группами транспортных средств. С учетом всех этих факторов можно определить рекомендуемую скорость для динамического знака на перекрестке:
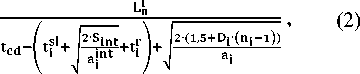
где Vlcp – средняя скорость лидирующего автомобиля (км/ч); Liп – длина i-го перегона (м); tcd – время сдвига разрешающего сигнала (с); tsli – время на достижение стоп-линии i-го ТС с момента включения разрешающего сигнала светофора (с); Sint – длина перекрёстка (задается для каждого перекрестка отдельно) (м); aint i – ускорение i-го ТС при проезде участка перекрестка (м/с2); tr i – время реакции водителя 1-го ТС (запаздывание старта первого ТС) (с); D i – динамический габарит i-го ТС (м); n i – порядковый номер в очереди i-го ТС (м); a i – ускорение i-го ТС (м/с2).
В результате расчетов были получены следующие зависимости (рис. 6). На рисунке мы видим, что при длине перегона 300 м данную методику целесообразно использовать при времени сдвига 25 с и 35 с. Для 5-го ТС рекомендуемая скорость составит 50 км/ч при времени сдвига 25 с, а для 4-го – 35 км/ч при времени сдвига 35 с.
Результат
Разработана математическая модель расчета средней скорости транспортного потока для ор-
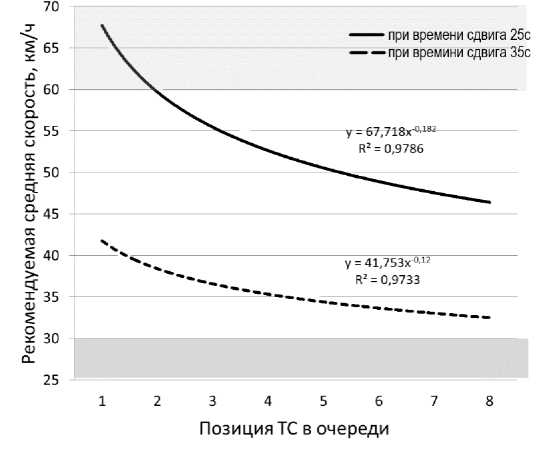
Рис. 6. Средняя скорость проезда перегона лидирующим автомобилем, в зависимости от времени разъезда внегрупповых автомобилей при длине перегона 300 м
ганизации безостановочного проезда регулируемого пересечения с учетом параметров очереди внегрупповых ТС. Расчетные значения на основе модели показывают сокращение времени задержки ТС перед регулируемым перекрестком до 20 % и повышение средней скорости его проезда на 10– 15 %. В данном исследовании рассмотрены различные варианты зависимостей средних скоростей групповых автомобилей от длины очереди транспортных средств при разной длине перегона и разном времени сдвига разрешающего сигнала при координированном управлении дорожным движением. Моделирование и управление параметрами транспортных потоков в режиме реального времени на основе машинного зрения является мощным инструментом для повышения эффективности дорожно-транспортной инфраструктуры городов.
Список литературы Повышение пропускной способности на регулируемых пересечениях за счет оптимизации скоростных режимов транспортных потоков
- Highway Capacity Manual. TRB, Washington, DC, 2000. 1134 p.
- Sarwar S., Sipos T., Bilal M.T., Verebélyi B. Exploring correlation between highway intersection capaci-ty and traffic parameters // Periodica Polytechnica Transportation Engineering. 2021. V. 49(4). P. 344–353. DOI: 10.3311/PPTR.15809
- Knoop V.L., Wierbos M.J., van Boggelen O. Capacity gains of splitting cross-traffic into multiple sub-streams // Transportation Research Record Journal of the Transportation Research Board. 2022. DOI: 10.1177/03611981211036683
- Makki A.A., Nguyen T.T., Ren J., Al-Jumeily D., & Hurst W. Estimating road traffic capacity // IEEE Access. 2020, 8. P. 228525–228547. DOI: 10.1109/ACCESS.2020.3040276
- Моделирование пропускной способности узлов транспортной городской сети на основе методов нечеткой логики / В.Д. Шепелев, А.И. Глушков, И.С. Слободин и др. // Вестник ЮУрГУ. Серия «Экономика и менеджмент». 2021. Т. 15, № 4. С. 181–187. DOI: 10.14529/em210419. EDN: IMAPPK.
- Shepelev V., Aliukov S., Glushkov A. et al. Identification of distinguishing characteristics of intersec-tions based on statistical analysis and data from video cameras // J Big Data 7, 46 (2020). DOI: 10.1186/s40537-020-00324-7
- Luis Ramirez-Polo, Miguel A. Jimenez-Barros, Vladimir Varela Narváez, Carlos Parodi Daza, Simula-tion and Optimization of Traffic Lights For Vehicles Flow in High Traffic Areas // Procedia Computer Science. 2022. Vol. 198. P. 548–553. ISSN 1877-0509.
- Kentaro Wada, Kento Usui, Tsubasa Takigawa, Masao Kuwahara, An optimization modeling of coordi-nated traffic signal control based on the variational theory and its stochastic extension // Transportation Research Procedia. 2017. Vol. 23. P. 624–644. ISSN 2352-1465.
- Mandal A., Sadhukhan P., Gaji F., Sharma P. Time Road Traffic Queue Length: A Reliable Approach Using Ultrasonic Sensor // Lecture Notes in Electrical Engineering. 2020. Vol. 602. P. 391–398. DOI: 10.1007/978-981-15-0829-5_38
- Chang J., Talas M., Muthuswamy S. Simple methodology for estimating queue lengths at signalized in-tersections using detector data // Transportation Research Record. 2013. Vol. 2355. P. 31–38. DOI: 10.3141/2355-04
- Mandava S., Boriboonsomsin K. and Barth M. Arterial velocity planning based on traffic signal infor-mation under light traffic conditions // 2009 12th International IEEE Conference on Intelligent Transportation Systems, St. Louis, MO, USA, 2009. P. 1–6. DOI: 10.1109/ITSC.2009.5309519
- Li Z., Wang B., Zhang J. Comparative Analysis of Drivers, Start-Up Time of the First Two Vehicles at Signalized Intersections // Journal of Advanced Transportation. 2016. 50.2. P. 228–239. DOI: 10.1002/atr.1318
- ОДМ 218.2.020-2012. Методические рекомендации по оценке пропускной способности автомобильных дорог. М., 2012.
- Власов А.А. Теория транспортных потоков: монография. Пенза: ПГУАС, 2014. 124 с.
- Ibryaeva O.L., Shepelev V.D., Kuzmicheva O.D. A Study of the Impact of the Transport Queue Struc-ture on the Traffic Capacity of a Signalized Intersection Using Neural Networks // Transportation Research Procedia, 23, Paphos, 2021. P. 589–596. DOI: 10.1016/j.trpro.2021.01.070. EDN: OJVFFW.
- Кременец Ю.А., Печерский М.П., Афанасьев М.Б. Технические средства организации дорожного движения. М.: ИКЦ «Академкнига», 2005.
