Прецизионная автономная модульная 24-разрядная система сбора геофизических данных

Автор: Гравиров Валентин Валентинович, Кислов К.В., Лиходеев Д.В., Нумалов А.С.
Журнал: Научное приборостроение @nauchnoe-priborostroenie
Рубрика: Работы с конференции
Статья в выпуске: 4 т.28, 2018 года.
Бесплатный доступ
Статья посвящена деталям разработки новой малогабаритной модульной малопотребляющей системы сбора информации, построенной на базе 24-разрядного аналого-цифрового преобразователя. Современные геофизические наблюдения сейчас невозможно себе представить без использования разнообразных электронных систем сбора информации. Какой параметр или явление мы не пытались бы зарегистрировать или измерить, везде будет присутствовать обязательный элемент - аналого-цифровой преобразователь. Но, к сожалению, зачастую невозможно найти идеальную систему сбора информации для каждой решаемой задачи. В геофизических исследованиях многие задачи оказываются "штучным товаром", для которого необходимо иметь свою систему сбора, обладающую специфическими характеристиками. Это является одной из причин разработок все новых вариантов систем сбора вплоть до настоящего времени. В статье описывается разработка такой специализированной малогабаритной модульной системы сбора информации. Дано описание ее основных функциональных блоков, уделено внимание наиболее важным параметрам, влияющим как на качество всей системы в целом, так и на улучшение эффективной разрядности за счет максимального уменьшения уровня собственных шумов.
Ацп, система сбора информации, мониторинг
Короткий адрес: https://sciup.org/142217040
IDR: 142217040 | УДК: 550.34.033 | DOI: 10.18358/np-28-4-i6472
Precision autonomous modular 24-bits geophysical data acquisition system
The article is devoted to the details of the development of a new small-size modular low-power data acquisition system based on a 24-bit analog-to-digital converter chip. Modern geophysical observations are now impossible to imagine without using a wide variety of electronic systems for collecting information. Any parameter or phenomenon what we would like to register or measure everywhere will have the obligatory element - an analog-to-digital converter. However, unfortunately, it is often impossible to find an ideal system for solving any necessary task. In geophysical research, many tasks turn out to be a "piece goods" for which it is necessary to have its own data acquisition system, which has its own specific characteristics. This is one of the reasons for the development of all new versions of data acquisition systems up to the present. The article describes the development of such a specialized small-size modular data acquisition system. It is given the description of its main functional blocks; special attention is paying to the most important parameters that affect both the quality of the entire system as a whole and the improvement of the effective number of bits by minimizing the level of internal system self-noise.
Текст научной статьи Прецизионная автономная модульная 24-разрядная система сбора геофизических данных
Современные геофизические наблюдения сейчас невозможно себе представить без использования разнообразных электронных систем сбора информации. Какой параметр или явление мы не пытались бы зарегистрировать или измерить, везде будет присутствовать обязательный элемент — аналого-цифровой преобразователь (АЦП). С его помощью производится преобразование любого аналогового сигнала в современную цифровую форму — двоичный цифровой код, который далее может быть введен в любую компьютерную систему для последующего хранения или специальной обработки.
При первом взгляде на существующий сегодня рынок разнообразных систем сбора информации может показаться, что для любой задачи уже без проблем можно найти подходящую систему. Но при ближайшем рассмотрении выясняется, что это не совсем так.
Во-первых, в реальности производителей качественных систем сбора не так уж и много. Во-вторых, прецизионные 24-разрядные системы представлены на рынке не очень широко ввиду того, что зачастую их входной частотный диапазон ограничен десятками или в крайнем случае сотнями герц [1, 2]. Соответственно круг потенци- альных пользователей подобных систем сильно сужается. Это в свою очередь вызывает ограничение количества предлагаемых моделей и существенное увеличение цены на подобные устройства.
В геофизических исследованиях многие задачи оказываются "штучным товаром", для которого необходимо иметь свою систему сбора, обладающую своими специфическими характеристиками [3, 4]. Это вынуждает ученых и исследователей разрабатывать все новые варианты систем сбора вплоть до настоящего времени.
РАЗРАБОТКА ТЕХНИЧЕСКОГО ЗАДАНИЯ
В настоящее время найти малогабаритные внешние автономные блоки АЦП высокого разрешения отечественного производства оказывается совсем не простой задачей. Если не брать во внимание предлагаемые на рынке импортные системы и платы, встраиваемые внутрь персональных компьютеров, то становится очевидно, что сейчас в основном можно применять только внешние блоки АЦП производства двух ведущих российских фирм: L-Card и Zetlab. Образцы их изделий приведены на рис. 1.
Фирма L-Card с 1998 г. в течение долгого времени выпускала модуль Е-24 [5], базирующийся

Рис. 1. Отечественные внешние модули АЦП: ZET-220 (а) и Е-24 (б)
на использовании микросхем АЦП типа AD7714 (24-разрядный сигма-дельта АЦП производства фирмы Analog Devices) и 8-битного RISC процессора AVR фирмы ATMEL, который обеспечивал все функционирование модуля, а также протокол взаимодействия с подключенным компьютером. К сожалению, в настоящее время модуль Е-24 снят с производства, но во многих научных организациях до сих пор используются многочисленные системы и установки на его основе.
Сейчас свободно можно купить только изделия фирмы Zetlab, например модуль ZET-220 [6]. Данное изделие тоже базируется на микросхемах производства фирмы Analog Devices. Ввиду того, что данный модуль является новой разработкой, он, в отличие от Е-24, обладает существенно лучшими характеристиками. Следует особо подчеркнуть пользования большого числа аналоговых входов, увеличенный в 4 раза по сравнению с Е-24 диапазон входных напряжений и возможность работы в автономном режиме без подключения к какому-либо компьютеру, позволяющую сохранять собранные данные во внутренней памяти модуля (реализованной на базе флэш-диска) с возможностью их дальнейшей передачи через шину USB или сеть Ethernet. К большому сожалению, найти информацию касательно внутреннего устройства модуля не представляется возможным, т. к. фирма-производитель нигде не дает никаких ссылок и никакой информации на этот счет, кроме рисунка структурной схемы модуля, приведенного на сайте фирмы-изготовителя. Сравнение базовых параметров перечисленных модулей приведено в табл. 1.
реализованную возможность одновременного ис-
Табл. 1. Сравнение основных характеристик внешних модулей АЦП
|
Параметр |
Е-24 |
ZET 220 |
|
Разрешение преобразования, бит |
24 |
24 |
|
Входное напряжение (диф. вход), В |
5 (±2.5) |
20 (±10) |
|
Коэффициент усиления входного сигнала |
1–128 |
Нет данных |
|
Потребляемая мощность, Вт |
< 0.05 |
2.5 |
|
Количество входных каналов (диф. каналов) |
4 (4) |
16 (8) |
|
Тактовая частота, Гц |
4–1000 |
4–8000 |
|
Межканальное проникновение, дБ |
Нет данных |
–90 |
|
Подключение к компьютеру |
RS232 |
USB, LAN |
|
Напряжение питания |
12 В или RS232 |
5 В или USB |
|
Автономный режим |
Нет |
Есть |
К сожалению, базовые данные, предоставленные обоими производителями, не позволяют оценить реальные рабочие параметры этих устройств. Достаточно провести несложный эксперимент по записи тестовых сигналов, как становится понятно, что реальное разрешение или эффективная разрядность обоих модулей фактически не превышает 20–21 бит при частоте опроса 100 Гц и более. Также у обоих модулей присутствует межканальное проникновение сигналов порядка 85–95 дБ, что при общем динамическом диапазоне 144 дБ составляет не такую уж маленькую величину и требует учета при проведении особо прецизионных измерений, например высокоточного измерения температуры. Сравнивая измеренные параметры модулей с близким по характеристикам иностранным цифровым регистратором Reftek-130 (экспериментально измеренная эффективная разрядность — 23 бита, межканальное проникновение — на уровне 130 дБ), видно, что при качественном проектировании подобных электронных модулей можно добиться существенно лучших показателей.
Все вышеперечисленное явилось причиной начала работ по проектированию собственной прецизионной модульной системы сбора. Кроме этого, немаловажным фактором являлась задача снижения себестоимости системы, поскольку для некоторых геофизических задач достаточно иметь систему с одним или максимум тремя аналоговыми входами, а за 16-канальный (большинство из которых обычно не используется) модуль Zetlab надо заплатить не менее 30–40 тыс. руб. Итак, исходными данными при разработке нашей цифровой системы сбора данных являлись:
-
• разрешение преобразования, бит — 24;
-
• эффективная разрядность не хуже, бит — 22;
-
• тип аналогового входа — дифференциальный;
-
• входное аналоговое напряжение, В — 10;
-
• количество входных каналов — 1 (с возможностью расширения до 16);
-
• тактовая частота, Гц — от 1 до 100;
-
• динамический диапазон не хуже, дБ — 132;
-
• межканальное проникновение не хуже, дБ — 122;
-
• потребляемая мощность не более, Вт — 1.
При этом также было необходимо, по возможности без существенного ухудшения характеристик всей системы в целом, уменьшить ее себестоимость.
РАЗРАБОТКА МАКЕТА
Проанализировав имеющиеся на сегодняшний день на электронном рынке микросхемы аналогоцифровых преобразователей (АЦП), выбрали электронные изделия производства фирмы Analog Devices [6]. Было решено применять микросхемы АЦП с балансировкой заряда, или, как их еще называют, сигма-дельта АЦП, поскольку их основное достоинство связано с практически реализуемой высокой точностью преобразования, обусловленной крайне низким уровнем собственных шумов. Благодаря своей внутренней структуре фактически сигма-дельта АЦП является фильтром низких частот (ФНЧ) для входного аналогового сигнала и одновременно фильтром высоких частот для шума дискретизации, причем оба фильтра имеют одинаковую частоту среза. В итоге шум сосредотачивается в высокочастотной области спектра и легко удаляется цифровым ФНЧ, который также входит в состав АЦП. Кратко перечислим основные достоинства, присущие всем сигма-дельта АЦП [1]:
-
• низкая стоимость;
-
• высокая разрешающая способность;
-
• превосходная дифференциальная нелинейность;
-
• низкая потребляемая мощность;
-
• ограниченная полоса пропускания входных сигналов;
-
• простые ключевые концепции реализации, но сложная внутренняя математика;
-
• наличие избыточной дискретизации;
-
• проведение эффективной фильтрации шума квантования;
-
• идеальная применимость для устройств обработки высокоточных сигналов разнообразных датчиков.
Входной сигнал от датчика
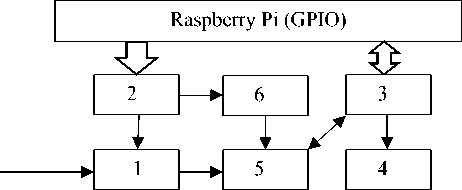
Рис. 2. Обобщенная структурная схема разработанной платы АЦП системы сбора геофизических данных.
1 — входной блок, 2 — блок внутреннего питания, 3 — блок коммутации, 4 — блок индикации, 5 — микросхема АЦП, 6 — блок опорного напряжения
Из большого разнообразия предлагаемых микросхем был выбран чип, требующий минимального количества внешних соединений и дополнительных комплектующих. В выбранной микросхеме АЦП отсутствовала встроенная схема формирования опорного напряжения, что позволило нам создать систему с внешним высокостабильным источником опорного напряжения. К сожалению, часто многие разработчики не уделяют должного внимания вопросам стабильности опорных напряжений, однако от них непосредственно зависит не только получаемая точность преобразования, но и уровень шумов преобразования, что на первый взгляд неочевидно. Для стабилизации опорного напряжения была применена схема, включающая в себя прецизионный источник опорного напряжения и буферный выходной каскад, позволяющий исключить обратное влияние АЦП на источник опорного напряжения в моменты преобразования, т. е. когда входные цепи АЦП активно обращаются и используют опорное напряжение.
Обобщенная структурная схема разработанной платы АЦП системы сбора геофизических данных представлена на рис. 2. Плата подсоединяется к микрокомпьютеру Raspberry Pi3 через 40-контактный разъем интерфейса ввода/вывода общего назначения GPIO (General Purpose In-put/Output). Как видно из представленной блок-схемы, условно систему можно разделить на несколько функционально независимых блоков.
Входной блок (1) предназначен для ввода ана- логовых сигналов. Он состоит из буферного усилителя, используемого для согласования вход-ных/выходных сопротивлений источника сигнала и аналоговых входов микросхемы АЦП (5). Также входной усилитель осуществляет одновременную низкочастотную фильтрацию поступающих сигналов. Его амплитудно-частотная характеристика представлена на рис. 3. Из нее хорошо видно, что данный усилитель обладает коэффициентом усиления чуть меньше единицы. Это связано с тем, что вся аналоговая часть системы питается от одного источника питания +5 В, включая модуль формирователя опорного напряжения. Выходное напряжение любого блока опорного напряжения (6) всегда должно быть чуть меньше исходного напряжения питания. В нашей схеме оно соответствует 4.5 В, в то время как входной диапазон системы равен +5 В. Таким образом, за счет характеристики входного блока решена задача согласования уровней входных сигналов и величины опорного напряжения АЦП.
Блок внутреннего питания (2) обеспечивает питание всей аналоговой части устройства. Поскольку изначально планировалось, что питание системы будет производиться от одного первичного источника питания, питающего также цифровую часть системы, включая управляющий контроллер, то задача уменьшения шумовой составляющей по питанию приобретает особое значение. В нашей системе это достигается за счет применения микросхемы DC-DC преобразователя. При этом мы не только физически разделяем цепи питания разных блоков системы, но также и их заземление.
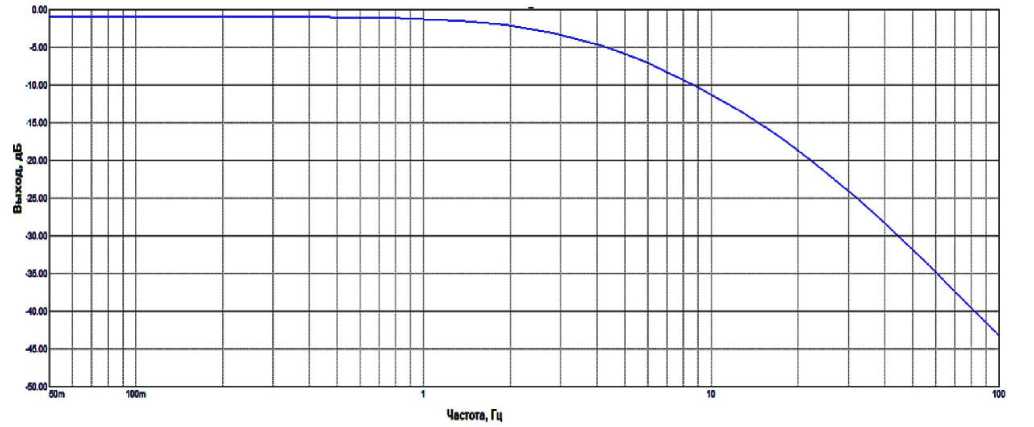
Рис. 3. Амплитудно-частотная характеристика входного усилителя
Табл. 2. Сигналы порта GPIO, используемые платой АЦП
|
№ контакта GPIO |
Имя порта GPIO |
Функция GPIO |
Сигнал модуля АЦП |
Тип порта |
Значение по умолчанию |
Реализуемая функция модуля |
|
19 |
GPIO 10 |
SPI_MOSI |
START |
Выход |
L |
Запуск процесса преобразования АЦП |
|
21 |
GPIO 09 |
SPI_MISO |
DRDY |
Вход |
L |
Получение данных от АЦП, сигнал готовности данных |
|
23 |
GPIO 11 |
SPI_CLK |
SCLK |
Выход |
L |
Тактовые импульсы |
|
29 |
GPIO 05 |
— |
ME1 |
Выход |
H |
Адрес модуля LSB |
|
31 |
GPIO 06 |
— |
ME2 |
Выход |
L |
Адрес модуля |
|
33 |
GPIO 13 |
— |
ME3 |
Выход |
L |
Адрес модуля |
|
35 |
GPIO 19 |
— |
ME4 |
Выход |
L |
Адрес модуля MSB |
|
37 |
GPIO 26 |
— |
Tempen |
Выход |
L |
Включение режима измерения температуры |
Блок коммутации (3) предназначен для осуществления внешней коммутации платы АЦП, например, с микрокомпьютером типа Raspberry Pi3. Соединения осуществляются по протоколу последовательного периферийного интерфейса SPI (Serial Peripheral Interface ) через соответствующие порты GPIO. Описание используемых контактов интерфейса GPIO микрокомпьютера Raspberry Pi3 представлено в табл. 2. В дальнейшем описании сигналы высокого уровня будем обозначать символом "H", а низкого — "L". Одной из основных задач блока коммутации является кодирова-ние/декодирование адреса АЦП. Как уже говорилось ранее, в разработанной системе аппаратно реализована возможность одновременного подключения до 16 независимых однотипных плат АЦП к одному управляющему контроллеру для практической реализации варианта 16-канальной системы сбора.
Диаграммы входных/выходных сигналов разработанной платы показаны на рис. 4.
Чтобы получить данные с любого модуля АЦП, необходимо провести следующие действия.
-
1. Установить сигнал Tempen = L.
-
2. Установить сигналами МЕ1–МЕ4 адрес выбранной платы АЦП.
-
3. Изменить сигнал START с L на H. После этого АЦП начитает процесс преобразования. Минимальная длительность этого сигнала должна быть не менее 17 мкс.
-
4. С началом преобразования сигнал DRDY изменится с L на H.
-
5. После изменения сигнала DRDY на H изменить сигнал START с H на L.
-
6. Время преобразования АЦП составляет от 45 до 84 мс в зависимости от режима работы модуля. Режим "Скорость" или "Разрешение" выставляется перемычкой на плате модуля.
-
7. Как только преобразование будет закончено и данные будут готовы к передаче, сигнал DRDY изменится с H на L.
-
8. Передать серию из 24 импульсов по шине START. В это время с каждым импульсом шины START по шине DRDY будет передаваться один бит результата преобразования АЦП, начиная с младшего разряда.
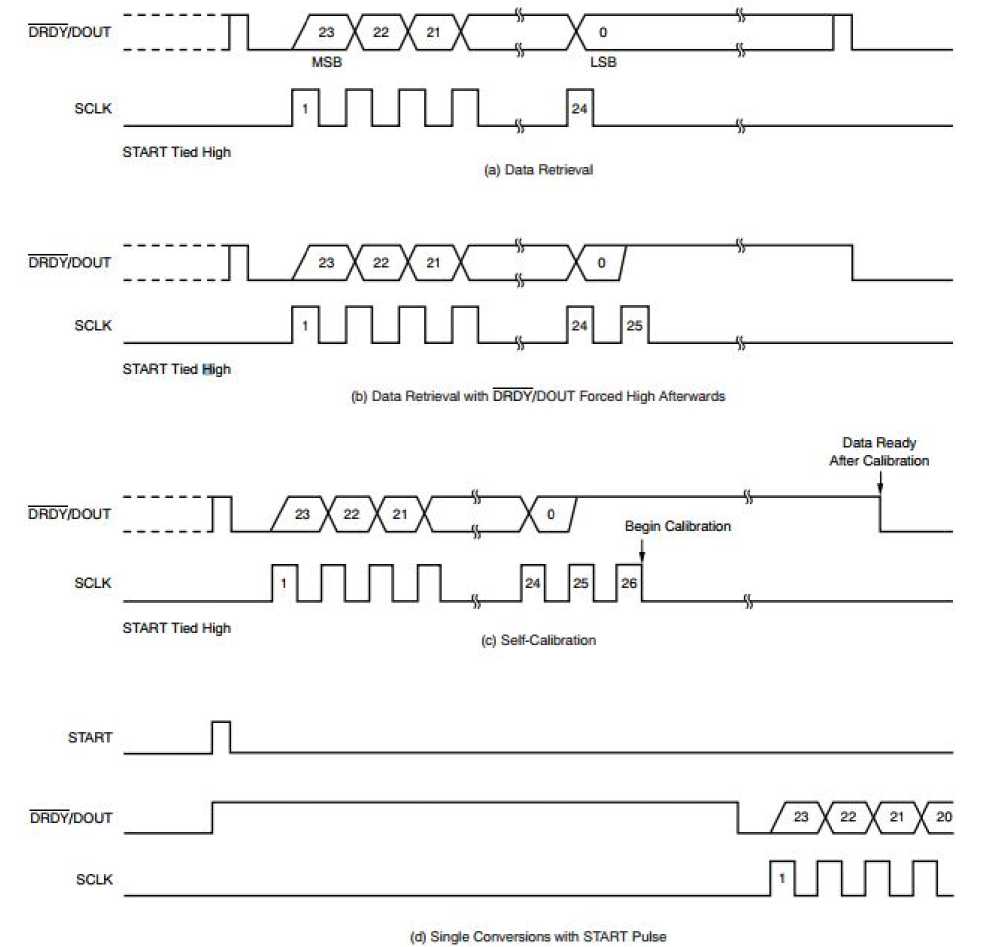
Рис. 4. Обобщенные временные диаграммы работы платы АЦП
И наконец, рассмотрим последний блок индикации (4), который предназначен, как следует из его названия, для визуальной индикации как режимов работы системы, так и отдельных системных цифровых сигналов, например тактовой шины SCLK. Для уменьшения общего энергопотребления системы реализована возможность аппаратного отключения данного блока путем удаления соответствующей перемычки на плате.
Общий вид распаянной одноканальной системы сбора показан в Приложении на рис. П1. Размер разработанной платы не превышает базовых габаритов 90 × 56 мм микрокомпьютера Raspberry Pi3, что хорошо видно в Приложении на рис. П2, где показана готовая сборка системы вместе с управляющим микрокомпьютером (внизу). Основные характеристики одноканального варианта исполнения разработанной системы приведены в табл. 3.
Табл. 3. Основные характеристики разработанной платы сбора информации (в одноканальном варианте)
|
Параметр |
Значение |
|
|
Разрешение преобразования, бит |
24 |
|
|
Эффективное разрешение: |
режим "Скорость", бит |
20 |
|
режим "Разрешение", бит |
22–23 |
|
|
Входное напряжение (диф. вход), В |
5 (10) |
|
|
Количество входных диф. каналов |
1 |
|
|
Коэффициент усиления входного сигнала |
1 |
|
|
Частота среза входного НЧ фильтра, Гц |
8 |
|
|
Тактовая частота, фиксированные значения, Гц |
16 и 100 |
|
|
Программируемая тактовая частота, Гц |
0.01–25 |
|
|
Потребляемая мощность: |
аналоговой части, Вт |
< 0.6 |
|
цифровой части, Вт |
< 0.05 |
|
|
Напряжение питания: |
аналоговой части, В |
5 |
|
цифровой части, В |
3.3 |
|
|
Межканальное проникновение |
Отсутствует |
|
ЗАКЛЮЧЕНИЕ
В настоящее время нами разработаны, изготовлены и проведены первые испытания опытных образцов описанной прецизионной системы сбора геофизических данных. Впереди предстоит важный этап полномасштабных испытаний и возможных доработок по улучшению параметров всей системы в целом.
По нашему мнению, разработанная система сбора данных обладает качественными характеристиками не хуже зарубежных и отечественных аналогов, а по некоторым параметрам и превосходит их. Несомненным плюсом системы является ее гибкость, возможность легкой замены одной мо- дели управляющего компьютера на другую. В дальнейшем планируется разработать собственную плату управляющего контроллера, что должно существенно понизить общее потребление всей системы в целом и сделать ее еще более мобильной. За счет применения в системе широко распространенных микросхем известных производителей удалось существенно уменьшить ее себестоимость.
Настоящая работа выполнена при финансовой поддержке гранта Президента Российской федерации для поддержки научных школ № НШ 5545.2018.5, а также в рамках государственного задания ИФЗ РАН.
ПРИЛОЖЕНИЕ
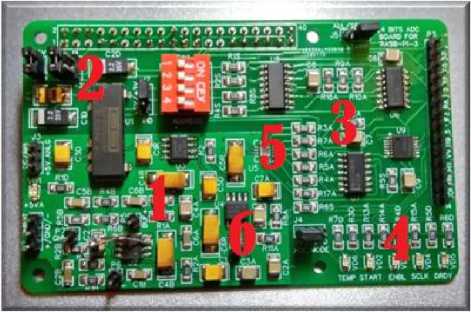

Рис. П1. Общий вид разработанной платы АЦП. Цифрами обозначено ориентировочное расположение основных блоков. Условная нумерация блоков такая же, как на рис. 2
Рис. П2. Сборка платы АЦП и управляющего микрокомпьютера Raspberry Pi
Список литературы Прецизионная автономная модульная 24-разрядная система сбора геофизических данных
- Колясев В.А., Молин С.М. Особенности применения сигма-дельта АЦП//Сборник материалов VII Всероссийской научно-технической конференции "Приборостроение в XXI веке. Интеграция науки, образования и производства". 2012. С. 53-57.
- Жмудь В.А. Применение ЦАП и АЦП в системах управления высшей точности//Автоматика и программная инженерия. 2013. Т. 6, № 4. С. 68-79.
- Лиходеев Д.В., Гравиров В.В., Кислов К.В. Прецизионные дифференциальные термометры для исследования тепловых процессов на базе Северокавказской геофизической обсерватории//Наука и технологические разработки. 2018. Т. 97, № 1. С. 15-24 DOI: 10.21455/std2018.1-2
- Kislov K.V., Gravirov V.V. On the metrological support of the long-period seismology//Proceedings of the 10th Intl. Conf. "Problems of Geocosmos". Petrodvorets, St. Petersburg State University, 2014. P. 18-19.
- Буткевич В., Невзоров В. Изделия L-Card: Отечественные платы АЦП/ЦАП с сигнальным процессором//Электроника: Наука, технология, бизнес. 1999. № 3. С. 32-33.
- Модуль АЦП-ЦАП ZET 220. URL: https://zetlab.com/shop/izmeritelnoe-oborudovanie/moduli-atsp-tsap/atsp-tsap-zet-220 (Дата обращения 25.05.2018).
- Аналого-цифровые преобразователи фирмы Analog Devices.URL: http://www.analog.com/ru/products/analogto-digital-converters.html (Дата обращения 25.05.2018).
