Предобработка космоснимков в задаче поиска объектов

Автор: Авраменко Юрий Владимирович, Федоров Роман Константинович, Ружников Геннадий Михайлович
Журнал: Вестник Бурятского государственного университета. Математика, информатика @vestnik-bsu-maths
Рубрика: Информационные системы и технологии
Статья в выпуске: 4, 2018 года.
Бесплатный доступ
В статье рассматривается совместное использование структурных методов и нейронных сетей для обнаружения антропогенных объектов, т.е. в методе поиска объектов по запросу пользователя на языке SOQL применяется классификатор на основе нейронной сети для оценки спектральных и текстурных признаков. В отличие от предыдущего метода опорных векторов (SVM) предложенный метод позволяет применять один классификатор для разных изображений.
Нейронные сети, классификация, логические методы распознавания
Короткий адрес: https://sciup.org/148308916
IDR: 148308916 | УДК: 004.032.26 | DOI: 10.18101/2304-5728-2018-4-16-21
Pre-processing of space images in the object search task
The article discusses the joint usage of structural methods and neural networks for the detection of man-made objects. It means that in the method of searching objects on user request in the SOQL language a neural network classifier is used to evaluate the spectral and texture features. It is possible to apply one classifier to different images.
Текст научной статьи Предобработка космоснимков в задаче поиска объектов
В настоящее время методы дистанционного зондирования Земли (ДЗЗ) из космоса являются одними из важнейших инструментов исследования природных и антропогенных объектов и явлений в задачах экологического мониторинга и рационального природопользования. Особое значение эти методы приобретают при комплексном изучении обширных и малонаселенных территорий, поскольку спутниковые данные зачастую являются для них единственным источником оперативной и объективной ин- формации. Одной из актуальных задач является обнаружение антропогенных объектов для оценки динамики антропогенного влияния, которая требует учета многих факторов: изменение освещенности, нечеткость признаков, сдвиг изображений относительно угла съемки сенсора, время года и т. д. Анализ должен базироваться на использовании знаний о совокупности спектральных, текстурных и структурных признаков. Большинство существующих подходов [1] направлено на обработку текстурноспектральных признаков. В рамках данных подходов затруднено решение задач, связанных с подсчетом количества исследуемых объектов, определением их формы, взаимного расположения и т. д. Это привело к созданию методов, учитывающих как текстурно-спектральные признаки, так и структурную информацию [2]. Данные методы ориентированы на определенный набор данных, а их перенастройка требует времени, вследствие чего появились методы поиска объектов на основе описаний пользователя [3].
Метод поиска объектов
В ИДСТУ СО РАН разработан метод поиска объектов на растровых изображениях [4]. Метод производит поиск объектов, заданных пользователем в виде правил на языке пространственных запросов SOQL. Пример правила для поиска здания прямоугольной формы:
building(A, В, С, D) :-
Ипе(А, В), Ипе(В, С), Ипе(С, D), Une(D, А), dist(A, В) > 30, dist(B, С) >30, dist(C, D) >30, dist(D, А) >30, dist(A, В) < 120, dist(B, С) < 120, dist(C, D) < 120, dist(D, A) < 120, an-gle(A, В, C) = 90, angle(B, C, D) = 90, angle(C, D, A) = 90.
Метод учитывает спектральные и текстурные признаки, выделяя участки поиска объектов, производит оценку соответствия найденного объекта его спектральным и текстурных характеристикам. Пример работы метода показан на рис. 1.
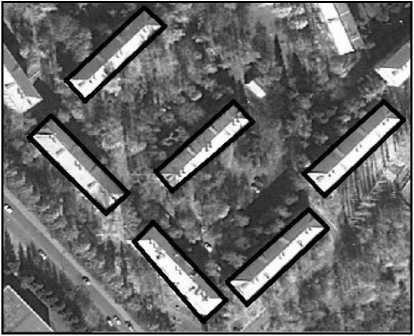
Рис. 1. Поиск зданий прямоугольной формы на изображении, г. Иркутск
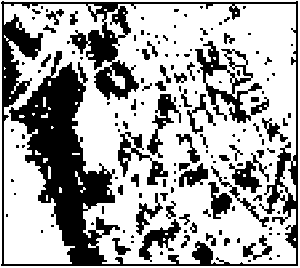
Ранее для оценки спектральных и текстурных признаков применялся метод опорных векторов (SVM). На рис. 2 показан результат выделения растительного покрова с учетом особенностей территории г. Иркутска, что позволяет путем сокращения пространства поиска уменьшить время работы метода.

Рис. 2. Исходное изображение слева, результат классификации методом SVM справа
Метод SVM, с одной стороны, позволяет на малой обучающей выборке построить модель классификации, а с другой — обучение необходимо проводить для каждого изображения. С точки зрения пользователя это работа, требующая времени и высокой квалификации, поэтому является актуальным применение классификатора на основе нейронной сети.
-
2. Классификатор
Практическое применение нейронных сетей началось с конца 50-х гг. XX в., когда Розенблатт изобрел однослойный персептрон и продемонстрировал его способность решать задачи классификации, об устройстве нейронной сети изложено в работе [5]. После победы нейронной сети AlcxNct, разработанной Крижсвским [6], в конкурсе ILSVRC 2012 (ImageNet Large Scale Visual Recognition Challenge) они стали набирать популярность среди исследователей. Одно из практических применений нейронных сетей — это решение задачи классификации образов, представленных в виде изображений, сигналов, текстов, табличных данных и т. д. В контексте настоящей статьи под классификацией будем понимать задачу, в которой каждому пикселю исходного изображения (космоснимка) необходимо поставить в соответствие метку, указывающую на его принадлежность к одному из предопределенных классов.
При построении классификатора на основе нейронной сетей необходимо:
-
1) составить обучающую выборку,
-
2) определить топологию сети,
-
3) провести ее обучение и апробацию.
Для каждого класса объектов (вода, грунт, дороги, здания, лес), бьшо отобрано по 2000 представителей, из них 1800 составили тренировочную выборку, а 200 — тестовую. Классификация космоснимков осуществля-ласъ методом сколъзящего окна, размер окна определялся относителъно объектов интереса и составил 15x15 пикселей.
Для разработки нейронной сети существуют фреймворки: Caffe, Keras, TensorFlow и другие. Помимо этого в интернете доступно множество готовых моделей нейронных сетей (VGG16, VGG19, ResNet50, Inception V4), а также предобученных моделей. В текущей работе для разработки нейронной сети использовался TensorFlow. За основу была взята сеть1. Топология сети представлена на рис. 3.
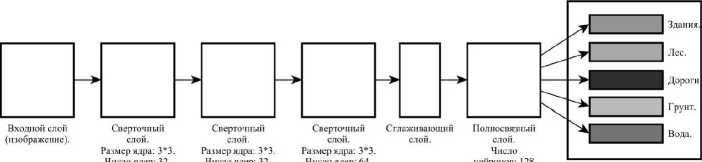
Выходной слой (метки классов).
Рис. 3. Топология нейронной сети
После обучения нейронной сети проведена ее апробация на изображениях размером 2048x2048 пикселей. Пример изображения показан на рис. 4.

Рис. 4. Исходное изображение
Результатом работы классификатора является сегментированное на 5 классов изображение. Для каждого положения скользящего окна запускался классификатор, выход которого — это вектор ^хх,хэ,х3,х^,х5\ гдех, — оценка принадлежности изображения под скользящим окном соответствующему классу объектов хе [0,1], / —класс объекта. Пример работы классификатора показан на рис. 5.

Рис. 5. Результат классификации: слева — человеком, справа — классификатором

Заключение
В результате применения классификатора на основе нейронной сети для тематической обработки космоснимков методом поиска объектов удалось существенно сократить пространство перебора. В отличие от предыдущего способа (SVM) предложенный метод позволяет применять один классификатор для разных изображений.
Результаты получены при использовании сетевой инфраструктуры Телекоммуникационного центра коллективного пользования «Интегрированная информационно-вычислительная сеть Иркутского научнообразовательного комплекса» (ЦКП ИИВС ИРНОК).
Список литературы Предобработка космоснимков в задаче поиска объектов
- Методы и технологии обработки мульти-и гиперспектральных данных дистанционного зондирования Земли высокого разрешения/О. И. Потатуркин //Вычислительные технологии. 2013. Т. 18. С. 60-67.
- Automatic reconstruction of regular buildings using a shapebased balloon snake model/D. Yari, M. Mokhtarzade, H. Ebadi, S. Ahmadi//Photogrammetric Record. 2014. Vol. 29, № 146. P. 187-205.
- Kolbe T. H., Plumer L., Cremers A. B. Using Constraints for the Identification of Buildings in Aerial Images//Procedings of the 2nd International Conference on the Practical Application of Constraint Technology. 1996. P. 1-12.
- Интерпретатор языка SOQL для обработки растровых изображений/И. В. Бычков //Вычислительные технологии. 2016. Т. 21, № 1. С. 49-59.
- Rashid T. Make your own neural network. CreateSpace Independent Publishing Platform. 2016. 222 p.
- Krizhevsky A., Sutskever I., Hinton G. E. Imagenet classification with deep convolutional neural networks//Advances in neural information processing systems. 2012. P. 1097-1105.
