Преобразование чертѐжно-конструкторской документации в трѐхмерную каркасную модель

Автор: Роменский С.А., Ротков С.И
Журнал: Онтология проектирования @ontology-of-designing
Рубрика: Инжиниринг онтологий
Статья в выпуске: 1 (59) т.16, 2026 года.
Бесплатный доступ
Статья посвящена решению актуальной проблемы автоматизированного преобразования двухмерных технических чертежей в трѐхмерные каркасные модели. Существующие решения преимущественно обеспечивают одностороннее преобразование трѐхмерных моделей в двухмерные чертежи. В работе описаны: алгоритм автоматизированной обработки проекционных видов, основанный на использовании ограничивающих прямоугольников для выделения проекционных видов и проекционных векторов для восстановления линий проекционных связей; алгоритм формирования каркасной модели на основе анализа связей между точками облака и проекций рѐбер на проекционные виды, учитывающий различные конфигурации несущих линий (прямые, эллипсы) и расширяющий класс моделируемых тел до объектов, ограниченных плоскостями и поверхностями второго порядка (эллипсоиды, эллиптические цилиндры, конусы). Полученные результаты позволяют на порядок сократить время построения трѐхмерной модели по двухмерным чертежам объектов различного назначения.
Обратная задача, начертательная геометрия, проекционные виды, точечная модель, каркасная модель, трѐхмерная модель, проекционные связи, технический чертѐж
Короткий адрес: https://sciup.org/170211638
IDR: 170211638 | УДК: 514.182.2 | DOI: 10.18287/2223-9537-2026-16-1-98-110
Algorithms of reconstruction of 3d wireframe model from drawings
This article describes the issue of automated conversion of two-dimensional technical drawings into three-dimensional wireframe models, a key aspect in the context of digitalization and the transition to paperless technologies in mechanical engineering and construction. Despite significant advances in computer-aided design systems, existing solutions primarily provide a one-way link from three-dimensional models to two-dimensional drawings, while reconstructing three-dimensional models from two-dimensional projections remains a complex inverse problem of descriptive geometry. This paper describes an algorithm for automated processing of projection views, focused on reconstructing topological and metric relationships, based on the use of bounding rectangles to select projection views and projection vectors to reconstruct projection relationship lines. An algorithm for generating a wireframe model is presented based on an analysis of connections between cloud points and edge projections onto projection views. This algorithm accounts for various configurations of supporting lines (lines, ellipses) and expands the class of modeled bodies to objects bounded by planes and quadratic surfaces (ellipsoids, elliptical cylinders, cones). The obtained results allow for a 30-100-fold reduction in design time for objects of various purposes. Experimental implementation demonstrated that a model that takes 40 minutes to construct manually can be automatically reconstructed in 33 seconds.
Текст научной статьи Преобразование чертѐжно-конструкторской документации в трѐхмерную каркасную модель
Обеспечение сохранности и доступности информации об объекте проектирования или производства важно для информационной поддержки жизненного цикла изделия, которая реализуется через интегрированные системы для машиностроительного [1, 2] и для строительного [3] комплексов.
Современные системы геометрии и графики, используемые на различных этапах поддержки жизненного цикла изделия, должны функционировать в двухмерном (2D) и трёхмерном (3D) пространствах измерений, обеспечивая взаимно однозначную информационную связь (3D↔2D). Однако большинство существующих систем предоставляют лишь одностороннюю связь 3D→2D. Это лишает конструктора возможности использовать методы, основанные на техническом чертеже, который содержит всю необходимую информацию, соответствует государственным стандартам и создаётся в электронном виде.
В современных системах автоматизированного проектирования (САПР) возможности формирования геометрических моделей (ГМ) трёхмерных объектов сводятся к четырём ба- зовым операциям: трём кинематическим (линейное перемещение, вращение, движение по заданной траектории) и построению модели через сечения. В основе этих функциональных операторов лежит каркасно-кинематический метод [4], в котором используются двухмерные данные – плоские контуры, что ограничивает гибкость работы с объёмными формами.
В [5] основное внимание уделено формообразующим операциям (выдавливание, вращение), которые могут служить базой для параметрического описания примитивов. В [6] исследуется реализация булевой операции вычитания, что полезно для создания внутренних полостей и сложных вырезов в построенных моделях. В [7] предлагается общий подход к аналитическому описанию тел как трёхпараметрических множеств точек. Представленный в этих работах математический аппарат может быть использован на этапах параметрического представления примитивов, модификации геометрии и оптимизации вычислений, однако для автоматического построения 3D-модели по проекциям потребуются дополнительные алгоритмы обратного проецирования, сегментации и подгонки параметров.
В [8] представлен автоматизированный метод для реконструкции трёхмерных псевдо-каркасных моделей из двухмерных проекционных изображений. Предложенный алгоритм включает обработку двухмерных векторных данных, маркировку вершин и рёбер, а также создание трёхмерных рёбер, что позволяет получить топологическое представление модели. Метод ориентирован на многогранники и не поддерживает криволинейные объекты.
В [9] представлен автоматизированный метод для извлечения полных сетей характерных кривых из трёхмерных точечных моделей поверхностей. Данный метод применим к трёхмерным точечным моделям, полученным с помощью 3D-сканера.
В [10] предлагается метод реконструкции трёхмерных объектов по одному изображению криволинейных поверхностях, используя данные силуэта и многоуровневые карты высот. Метод позволяет создавать трёхмерные модели с высоким разрешением для широкого спектра объектов. Данный подход ограничен симметричностью объекта относительно плоскости изображения.
Работа [11] посвящена автоматизированному созданию пространственных цифровых моделей из плоских чертежей с использованием аналитического R-функционального геометрического моделирования, которое обеспечивает переход от непрерывного представления функций к дискретно-непрерывному компьютерному аналогу.
В [12] предлагается генеративная модель, способная работать с последовательностями формообразующих операций САПР, таких как выдавливание, вращение, булевы операции для кодирования и генерации последовательностей формообразующих операций [13].
В [14 - 17] предлагается подход к автоматической генерации технических чертежей с использованием нейронных сетей. Модели обучают на большом наборе данных операций в САПР, включающем такие параметры, как размерность, геометрические ограничения и булевы операции, что позволяет создавать реалистичные эскизы, которые могут быть использованы для параметрического моделирования. Ключевая особенность подхода – возможность восстановления твёрдотельных моделей из зашумлённых трёхмерных сканов через генерацию промежуточных эскизов.
Рассмотренные методы либо ограничивают класс моделируемых тел (например, многогранниками), либо имеют ограниченную автоматизацию (с необходимостью ручной корректировки модели), либо сильно зависят от качества входных данных.
1 Постановка задачи
Обратная задача начертательной геометрии (НГ) представляет собой процесс создания трёхмерной ГМ тела на основе заданного чертежа. Под ГМ понимается математическое опи- сание формы объекта, а также совокупность данных, представляющих эту форму в памяти компьютера и являющуюся электронной моделью изделия (ЭМИ, см. ГОСТ 2.052-2021).
Известно несколько методов конструирования 3D ГМ из плоского чертежа:
-
■ метод обобщённого вращения плоского контура вокруг заданной оси;
-
■ метод обобщённого сдвига контура вдоль заданного вектора;
-
■ метод синтеза 3D модели по заданным проекциям тела (по многовидовому чертежу);
-
■ метод теоретико-множественных операций (ТМО).
Первые три метода реализуют каркасно-кинематический способ генерации данных о пространственном объекте [4]. Они ориентированы на воссоздание формы объекта путём преобразования его двухмерных представлений.
Алгоритм создания 3D-модели по 2D изображению включает следующие части [18].
-
■ Анализ изображения и подготовка его к синтезу модели: распознавание элементов чертежа, их оцифровку, предварительную обработку для устранения ошибок и противоречий.
-
■ Синтез вершин пространственной модели: определение 3D-координат ключевых точек (вершин) объекта на основе их проекций на различных видах.
-
■ Создание каркасной модели: соединение синтезированных вершин рёбрами для формирования каркаса, проверка его на соответствие исходным проекциям и геометрическим свойствам реального объекта.
-
■ Создание граничной модели: на основе каркаса формируются поверхности (грани), которые ограничивают тело, и проверяется их корректность.
-
■ Создание конструктивной модели тела, которую можно использовать в ТМО.
Объектом исследования являются двухмерные и трёхмерные ГМ объектов класса «Деталь».
Предметом исследования являются алгоритмы преобразования двухмерных ГМ, заданных на поле многовидового технического чертежа, в трёхмерные каркасные модели.
2 Основные понятия
Считается, что тело или его модель конечно и ограничено гладкими поверхностями, которые могут не иметь аналитического описания. Во всех системах геометрии и графики предполагается работа в 3D пространстве, в то время как на экране дисплея имеются физически две координаты .
Любой отрезок прямой или кривой, являющийся общей частью границы двух поверхностей, является ребром каркасной модели. Если при переходе через ребро внешняя нормаль к поверхности тела как вектор-функция координат n(x,y,z)=(nx(x,y,z),ny(x,y,z),nz(x,y,z)) имеет разрыв, то такое ребро называют конструктивным ребром каркаса; ребро называются неконструктивным, если при переходе через него нормаль изменяется непрерывно. Общие точки нескольких рёбер задают вершины каркаса. Любая вершина является общей граничной точкой нескольких частей поверхности тела. Под каркасной моделью пространственного геометрического тела понимается совокупность множества вершин и множества рёбер.
Чертёж объекта является совокупностью проекционных изображений [19], каждое из которых задаётся в своей, местной, системе координат и располагается на поле носителя в единой системе координат чертежа. Конструктивные рёбра каркаса и рёбра очерка криволинейных поверхностей проецируются в отрезки некоторых линий на картинной плоскости, которые могут накладываться друг на друга или пересекаться; линейные рёбра (отрезки прямых), параллельные вектору проецирования, вырождаются в точку. Вершины каркаса проецируются в точки. При проецировании инцидентность вершины и ребра, а, следовательно, и смежность вершин, не нарушаются, но проекции вершин могут также накладываться друг на друга. Из этого следует, что двухмерная модель проекции отличается от трёхмерной каркасной модели размерностью пространства, в котором заданы координаты точек-вершин и параметры несущих линий рёбер, и смысловым наполнением понятий «вершина» и «ребро». Под вершиной проекции понимается точка, заданная своими координатами на картинной плоскости. Под ребром проекции понимается отрезок прямой или кривой линии на этой плоскости (геометрический смысл), соединяющий две вершины проекции (топологический смысл).
Математическая модель проекции: PR={P,C,F}, где
F={F k =(P 1k ,P 2k ,C k ), P 1k ,P 2k ∈ P, C k ∈ C, k=1…M f } – множество рёбер проекции.
Задаётся класс тел (каркасная модель которых может быть синтезирована разрабатываемым алгоритмом):
-
■ пусть тело ограничено частями плоскостей и криволинейных поверхностей второго порядка (эллипсоидов, эллиптических цилиндров и эллиптических конусов);
-
■ пусть несущими линиями рёбер каркасной модели являются прямые и эллипсы, плоскости которых произвольно ориентированы в пространстве.
При прямолинейном ортогональном проецировании такого тела несущими линиями на плоскости проекции будут также прямые и эллипсы произвольной ориентации. Таким образом, определив класс моделируемых тел, выявлен класс исходных данных задачи: ребрами каждой проекции могут быть отрезки прямых и эллиптические дуги.
В соответствии с [19] чертёж объекта может содержать произвольное количество видов, расположенных на одном или на нескольких листах. Для формирования каркасной модели объекта принципиально важно привести все виды к единой системе координат. Одним из ключевых блоков программной реализации алгоритма синтеза является установление и проверка проекционных связей между видами [18], поскольку именно после этого этапа формируется массив 3D-координат модели.
Любая проекция трёхмерной модели на плоскость может быть представлена в виде графа G(V,R), где V – множество вершин, заданных своими координатами, а R – множество рёбер (линий первого или второго порядка), соединяющих эти вершины. Структурно чертёж также может быть представлен в виде графа D(F), где F – отдельные виды или фрагменты изображений объекта, каждый из которых изначально задан в своей локальной системе координат, связанной с общей системой координат чертежа.
3 Информационная модель задачи
Модель проекций (исходные данные).
Координаты вершин проекций на чертеже: P i =(X i ,Y i ), i=1…M p .
Уравнения несущих линий второго порядка (эллипсов):
EL j : A 11j (X-X cj )2 + 2A 12j (X-X cj )(Y-Y cj ) + A 22j (Y-Y cj )2 = 1 или
X=a j cos Ф j cos t - b j sin Ф j sin t +X cj , Y=a j sin Ф j cos t + b j cos Ф j sin t +Y cj , j=1…M el .
Параметры рёбер проекций:
R k = (N p1 k , N p2 k , N e1 k ), 1<= N p1 k , N p2 k <=M p , 0<= N e1 k <=M el , 1<=k<=M r , где N p1 k , N p2 k – номера вершин, инцидентных ребру, N e1 k – номер несущей линии (0 – прямая).
Модель каркаса (выходные данные).
Координаты вершин каркаса: V i = (X i ,Y i ,Z i ), i=1…N v .
Уравнения несущих линий второго порядка (эллипсов):
L j : уравнение плоскости и уравнение поверхности второго порядка (эллипсоида, эллиптического цилиндра или эллиптического конуса) или параметрически:
X=X j (t), Y=Y j (t), Z=Z j (t), где X j (t), Y j (t), Z j (t), – линейные комбинации функций {1, sin t, cos t}, коэффициенты которых связаны между собой, или в векторном виде:
-
r j (t 1 ,t 2 ) = r cj +t 1 r 1j +t 2 r 2j , t 12 +t 22 =1, где r cj – радиус-вектор центра эллипса, r 1j и r 2j – векторы полуосей эллипса, j=1…N l .
Параметры рёбер каркаса:
E k = (N v1 k , N v2 k , N 1 k ), 1<= N v1 k , N v2 k <=M p , 0<= N 1 k <=N l , 1<=k<=N e , где N v1 k , N v2 k – номера вершин, инцидентных ребру, N 1 k – номер несущей линии (0 – прямая).
Уравнения несущих линий первого порядка (прямых) легко получить исходя из координат, инцидентных ребру вершин, и эти уравнения не включены в модели каркаса и проекций явно, а все рёбра-отрезки имеют одинаковый номер несущей линии (равный 0).
4 Обработка проекционных видов
Применение стандартных подходов к поиску компонент связности не позволяет получить результат, так как отдельные элементы (например, отверстия внутри тела) могут быть не связаны с внешней геометрией и должны выделяться в отдельные компоненты.
Для работы с геометро-графической информацией для каждой плоской кривой или отрезка можно выделить ограничивающую область – прямоугольник, внутри которого помещается данный элемент. Для вертикальных и горизонтальных отрезков такой прямоугольник вырождается в отрезок. Для каждой компоненты связности (объединения связанных элементов) запоминается и динамически расширяется ограничивающий прямоугольник. Проверка принадлежности объекта к компоненте связности осуществляется по принципу пересечения ограничивающих прямоугольников: если ограничивающий прямоугольник объекта и ограничивающий прямоугольник компоненты связности имеют общую площадь, или общие вершины, или их стороны пересекаются, то объект считается частью данной компоненты. При добавлении нового объекта ограничивающий прямоугольник компоненты переопределяется (см. пример на рисунке 1).

|
— |
|
Использование ограничивающих прямоугольников выделенных проекционных видов в сочетании с [19] позволяет восстанавливать проекционные связи даже в случае их частичного нарушения [20]. Однако данный подход оказывается неэффективным, если геометро-графическая информация распределена по нескольким листам или когда ограничивающие прямоугольники видов имеют форму квадрата.
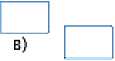
Рисунок 1 - Различные случаи расположения ограничивающих прямоугольников: а) и б) объект принадлежит компоненте и её ограничивающий прямоугольник обновляется (показан справа красным), в) объект не относится к проверяемой компоненте
При выделении каждого проекционного вида формируются два проекционных вектора координат точек – один с проекциями элементов вида на ось Ox чертежа, другой – на ось Oy. При добавлении очередного элемента к виду на соответ ствующие оси проецируются две или более его характерных точек (например, концы отрезка). На рисунке 2 показаны исходные проекционные виды и сформированные для них проекционные векторы. При невозможности восстановления проекционных связей между видами только с помощью ограничивающих прямоугольников полученные для каждого выделенного вида оба проекционных вектора сортируются и приводятся к общей точке отсчёта (например, к левому нижнему углу вида). После сортировки проводится сравнение этих векторов различных проекционных видов. Если проекционные векторы совпадают (т.е. разница всех их компонент меньше заранее определённого малого значения ε), то вычисляется вектор сдвига.
Для восстановления проекционных связей за главный вид принимается, как правило, левое верхнее проекционное изображение. Далее находятся виды, у которых совпадают проекционные векторы с векторами главного вида, и, в соответствии с [19], они располагаются в едином двухмерном пространстве. После этого определяются координаты точки начала отсчёта эпюра Монжа: x-координата как середина между видом слева и главным видом; y-координата как середина между видом спереди и видом сверху. На рисунке 3 представлены полученные векторы сдвига и найденная точка начала координат эпюра Монжа.
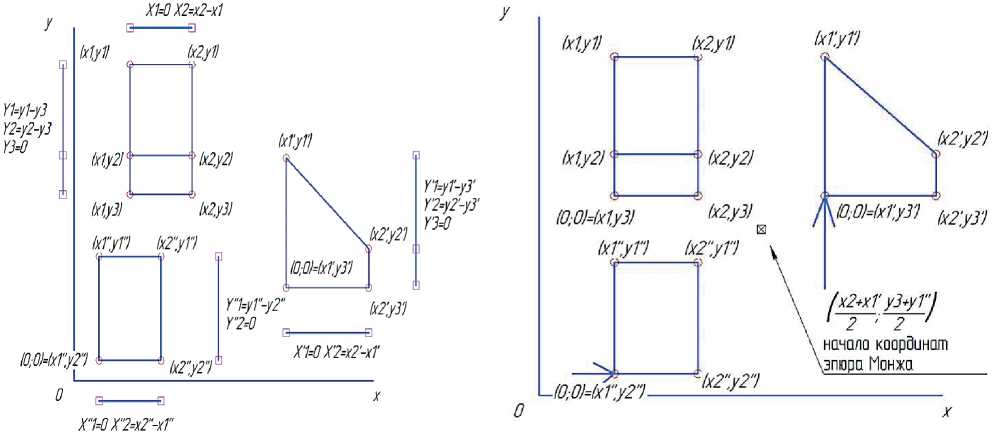
Рисунок 2 - Исходные проекционные виды и сформированные проекционные векторы
Рисунок 3 - Полученные в ходе алгоритма векторы сдвига и найденная точка начала координат эпюра Монжа
Таким образом, подход, сочетающий анализ ограничивающих прямоугольников и проекционных векторов, позволяет устанавливать пространственные связи между различными проекционными видами чертежа, подготавливая данные для синтеза трёхмерной модели.
5 Формирование точечной модели
На этапе реконструкции трёхмерной модели из двухмерных проекций создание точечной модели (облака точек) позволяет преобразовать информацию о соответствующих точках на нескольких двухмерных изображениях в их трёхмерные координаты. Центральное место в этом преобразовании занимает метод триангуляции, основанный на принципе пересечения лучей, проходящих из центров проекций через соответствующие точки на различных изображениях. Основные этапы алгоритма [18].
-
1) Определение соответствующих точек . Этот процесс включает извлечение координат проекций точки на соответствующих плоскостях.
-
2) Вычисление лучей проекции . Эти лучи представляют собой прямые линии в трёхмерном пространстве, которые теоретически должны пересекаться в истинной 3D координате исходной точки.
-
3) Пересечение лучей и минимизация ошибок . Вследствие ошибок в исходных данных лучи могут не сходиться в одной точке. В таких случаях для нахождения наиболее вероятной трёхмерной координаты используется метод наименьших квадратов.
-
4) Восстановление трёхмерных координат . На основе точки пересечения лучей вычисляются точные трёхмерные координаты каждой реконструируемой точки. Этот результат является основой для последующего построения полной 3D модели объекта.
В результате последовательного применения этих шагов к выделенным на предыдущем шаге проекционным изображениям формируется облако точек – дискретный набор трёхмерных координат, представляющий собой цифровую аппроксимацию поверхности исходного объекта. Это облако точек служит входными данными для дальнейших этапов реконструкции – созданию каркасных, поверхностных или твердотельных моделей объекта.
6 Формирование каркасной модели
Каркасная модель представляет собой совокупность вершин и рёбер, которые определяют основные геометрические очертания и структуру объекта. Алгоритм определения рёбер и формирования каркасной модели включает следующие шаги [18].
-
1) проекция точки на изображения.
Для каждой точки, входящей в сформированное облако точек, выполняется обратная операция — вычисляются её проекции на все доступные исходные проекционные изображения (например, фронтальную, горизонтальную и профильную проекции).
-
2) анализ матриц смежности.
На каждом проекционном изображении существует матрица смежности, которая отражает визуальные связи между проекциями точек. Если две проекции точек соединены линией или ребром на данном изображении, это указывает на потенциальную связь между соответствующими 3D точками. При наличии ребра между точками на проекции соответствующий элемент матрицы смежности равен 1, иначе – 0.
VH1
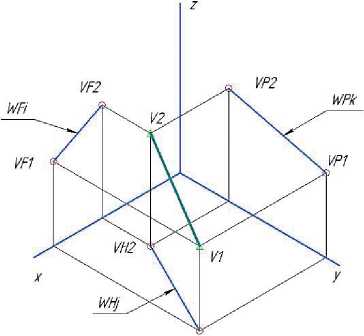
Рисунок 4 - Формирование ребра между вершинами V1 и V2
-
3) определение рёбер.
Проводится проверка: является ли потенциальное ребро между двумя 3D точками (V1 и V2) частью искомой каркасной модели. Для этого определяется наличие соответствующего ребра между их 2D проекциями (VF1 и VF2 на фронтальной, VH1 и VH2 на горизонтальной, VP1 и VP2 на профильной проекциях) на всех изображениях (рисунок 4).
Ребро в каркасной модели между двумя точками считается существующим, если на всех изображениях существует ребро между проекциями этих точек или проекции точек совпадают. Если на какой-либо из проекций точки совпали, то может быть восстановлено лишь ребро-отрезок.
Если проекции не совпали, то выделяются все рёбра, по которым смежны данные вершины: WFi, i=1…Nf для VF1 и VF2, WHj, j=1…NH для VH1 и VH2, WPk, k=1…NP для VP1 и VP2.
Рассматриваются все возможные тройки рёбер WFi, WHj, WPk. Если эти три ребра являются образами некоторого ребра каркасной модели, то несущие линии этих рёбер – это проекции пространственной прямой или эллипса. Возможны четыре принципиально различных конфигурации типов несущих линий для выбранных рёбер.
Если анализ показывает, что WFi, WHj, WPk могут являться проекциями некоторого ребра каркаса, то это ребро добавляется к модели и перебор троек рёбер продолжается. На основе проверенных связей формируется каркасная модель, которая состоит из вершин (точек облака) и рёбер (связей между точками).
-
Анализ рёбер на соответствие линии в 3D.
-
1) Если все три проекции ребра являются отрезками прямых, то ребро в пространстве, соединяющее вершины V1 и V2 является отрезком прямой.
-
2) Если одно из трёх рёбер – это дуга эллипса, а два оставшихся представляют собой отрезки прямых, то для каждого прямого ребра определяется проецирующую плоскость в трёхмерном пространстве, перпендикулярная его проекции. Искомое ребро каркаса, проекции которого совпадают с этими прямыми, должно принадлежать обеим таким плоскостям. Если эти плоскости пересекаются, то ребро лежит на их линии пересечения и не может быть эллиптической дугой на третьей проекции. Если же плоскости совпадают (параллельны проекционной плоскости третьего, эллиптического ребра), то потенциальное ребро каркаса находится на пересечении этих плоскостей с
эллиптическим цилиндром, который имеет ось, перпендикулярную плоскостям, и направляющую, соответствующую эллипсу. Эти плоскости не могут быть параллельны, так как у них уже есть две общие точки – вершины V1 и V2.
-
3) Если два ребра представляют собой дуги, а одно является отрезком, то ребро принадлежит каркасной модели, если:
-
■ эллипсы, на которых лежат дуги, имеют один и тот же центр и одинаковый размер вдоль оси, где их проекции соприкасаются (например, XF и XH, YF и YP, YH и XP). В этом случае два построенных на них эллиптических цилиндра (с осями, перпендикулярными плоскостям изображений) пересекутся в трёхмерном пространстве, порождая при этом две эллиптические кривые;
-
■ плоскость одного эллипса из предыдущего пункта совпадает с проецирующей плоскостью для ребра-отрезка на третьей проекции.
-
4) Если три ребра, соединяющие вершины V1 и V2, представляют собой дуги, то формирование трёхмерной эллиптической дуги возможно, если:
-
■ для каждой пары из тройки несущих эллипсов обязательны выполнение условий идентичности координат центров и соразмерности габаритов по соответствующим осям;
-
■ все три эллиптических цилиндра сходятся в одной общей эллиптической кривой в пространстве, которая формирует линию ребра каркаса.
Таким образом, на основе проверенных связей, выявленных на всех проекционных изображениях, формируется окончательная каркасная модель. Она состоит из вершин, взятых из облака точек, и рёбер, установленных в результате анализа проекций.
7 Примеры
Сравнивается время построения трёхмерной модели путём ручного и автоматизированного построения трёхмерной каркасной модели. На создание простой трёхмерной модели (см. рисунок 5) тратится от 2 до 5 минут. Программная реализация позволила получить результат через 0.5-3 секунды после запуска процесса чтения двумерной информации.
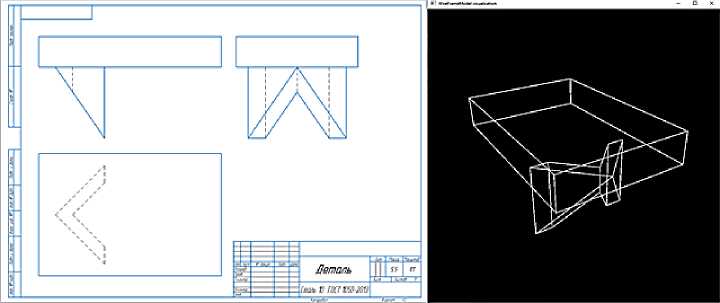
Рисунок 5 – Пример построения трёхмерной модели по двухмерному чертежу
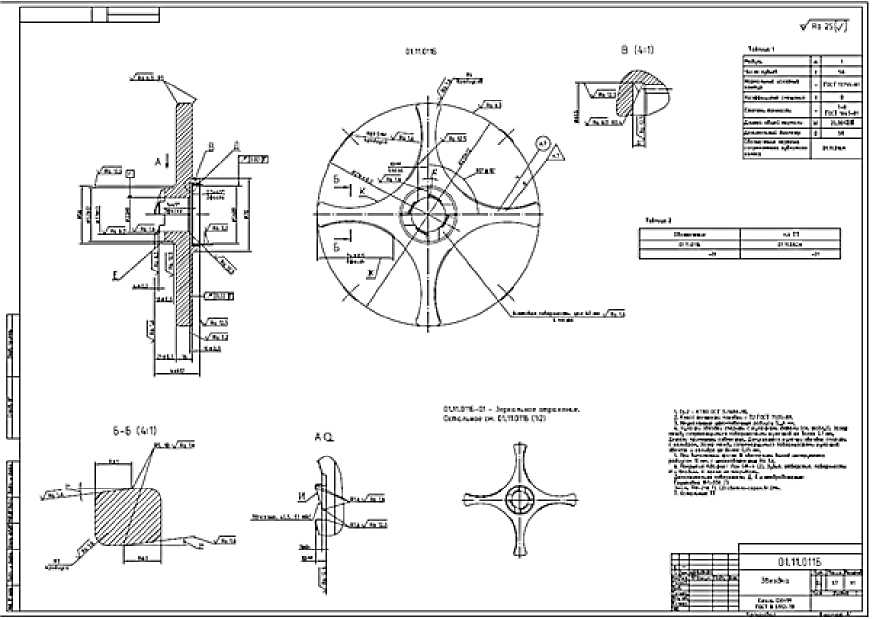
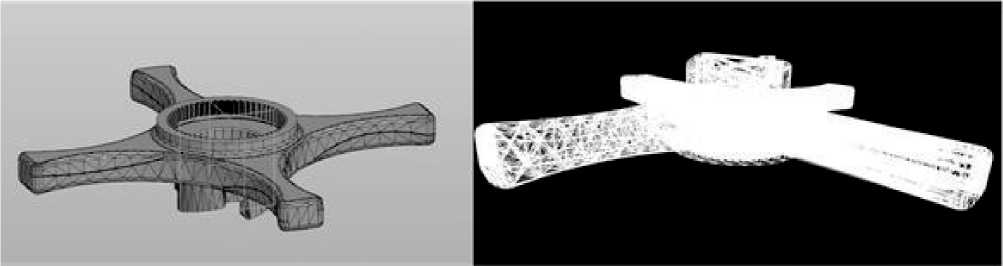
На рисунке 6 приведены чертеж изделия класса «деталь» и трёхмерные модели, полученные реализованным программным комплексом. В среднем для проектирования подобной детали необходимо совершить нескольких десятков формообразующих операций, на каждую из которых затрачивается до нескольких минут; реализованный программный комплекс тратит на создание каркасной модели меньше минуты [21].
Заключение
Представлен поэтапный алгоритм автоматизированного преобразования двухмерной чертёжно-конструкторской документации в трёхмерную каркасную модель.
а)
б)
в)
Рисунок 6 – Чертёж детали «Звездка» (а), визуализация трёхмерной модели в САПР Компас 3D (б), визуализация трёхмерной модели, полученная при применении разработанного алгоритма (в)
Предложенный подход, сочетающий использование ограничивающих прямоугольников и проекционных векторов, обеспечивает формирование пространственных связей (топологических и метрических) между проекционными видами. Восстановленные связи позволяют посредством триангуляции и минимизации ошибок методом наименьших квадратов воссоздать облако точек — трёхмерную точечную модель. На его основе с использованием обработанных проекционных изображений строится трёхмерная каркасная модель. Многовидовой анализ соответствия несущих линий рёбер (включая прямые и эллиптические дуги) на всех проекциях позволяет установить структурные связи между трёхмерными вершинами, что является преимуществом представляемого алгоритма перед методами, ограниченными прямолинейными формами. Представленный подход позволяет работать с объектами, ограниченными плоскостями и поверхностями второго порядка (эллипсоидами, эллиптическими цилиндрами и эллиптическими конусами), что расширяет область его практического применения в промышленном проектировании.
Представленный подход вносит вклад в формализацию обратной задачи НГ и алгоритмизацию её решений.
