Приближенное решение дифференциальных уравнений с отражением аргумента

Автор: Рекка Римма Александровна, Скачкова Елена Александровна
Журнал: Вестник Пермского университета. Математика. Механика. Информатика @vestnik-psu-mmi
Рубрика: Математика
Статья в выпуске: 3 (11), 2012 года.
Бесплатный доступ
Рассматривается применение метода осциллирующих функций к нахождению приближенного решения задачи Коши для дифференциального уравнения с отражением аргумента; получены оценки погрешности построенного решения.
Дифференциальное уравнение с отражением аргумента, метод осциллирующих функций, лирующих функций
Короткий адрес: https://sciup.org/14729800
IDR: 14729800 | УДК: 517.929
An approximate solution of differential equations with reflection of the argument
We consider the application of the method of oscillating functions to find numerical solution of the Cauchy problem for differential equations with reflection of the argument, an estimate the error of the solution is obtained.
Текст научной статьи Приближенное решение дифференциальных уравнений с отражением аргумента
При исследовании дифференциальных уравнений с отражением аргумента встает вопрос о том существует ли их решение и как его построить. Такого рода задачи часто встречаются при описании процессов в экологии, в теории популяции и многих других задачах.
Исследованию дифференциальных уравнений с отражением аргумента, особенно построению его приближенного решения, посвящено сравнительно мало работ. Некоторые статьи [1-3] посвящены вопросам существования, единственности и ограниченности решений дифференциальных уравнений с отражением аргумента. В работе [4] изучается система нелинейных дифференциальных уравнений первого порядка.
В медицинской биологии возникают уравнения, являющиеся частным случаем уравнения с запаздыванием, вида x'(t) = f (t, x (t), x (-1)) (1)
при условии x(0) = x0, где t е (-да,+да), а f (t, x (t), x (-t)) определена и непрерывна вместе с частными производными при
- да < x < +да . Существование и единственность решения рассматриваемой задачи доказаны в работах [1, 3].
Приближенное решение будем строить методом осциллирующих функций с шагом h . Отрезок [ - L , L ] разбиваем на N четных
„ , 2 L _ частей с шагом h = , а приближенное ре-
шение на каждом частичном промежутке строим в виде
x ( t ) = a ( t - ih ) + b , (2)
где i =
NN
2 , 2+1’"'’
N
- 1. Коэффициент b0
находим из начального условия, коэффициенты b - из условия непрерывности решения в
точках t = t :
x , — 1 ( ih ) = x i ( ih ), x , (( i + 1) h ) = x i + 1 (( i + 1) h ), (3)
где i =
NN
, + 1,'”’
N
- 1.
Подставив (2) в (3), получаем a, j (ih - (i -1)h) + b 2 = at (ih - ih) + b,
bi = ai-1(h -(i-1)h) + bi-!, bi = a, -ih + bi -1, b-1 = a,-2 ((i -1) h - (i - 2) h) + b-2, bi-1 = a,-2 h + bi-2, b-2 = a,- 3 ((i - 2) h - (i - 3) h) + b- 3, bi-2 = ai-3h + b,-3,
-
• •• ••• •••
-
b = aoh + b .
Для нахождения коэффициентов a
которое удовлетворяет дифференциальному уравнению x'(t) = f(t. x,(t). x,(-t)) + V, (t)
и начальному условию: xt (0) = x 0. Невязка ^ , ( t ) = a , - f ( t . a , ( t - ih ) + b, . a - , - 1 ( t + ( i + 1) h ) + + b - , - 1 )
при t , < t < t , +1 , где
NN
, =-- ,-- + 1
,...
N ,0,1,2,..., у -1
воспользуемся условиями осциллируемости невязки:
^ i ( t ) = x ( t ) - f ( t , x i ( t ), x i ( t )),
(i+1) h j ^-( t) dt = 0, ih
где i =
N
—
N
, + 1 22
,...,
0,1,2,..
N
•,
—
Для определения коэффициентов а и
a^ имеем формулы ai = (f (J,, а, , A - i) + f (J,, а, + 0 ai (J, - ih), dx - i-1
A - i + 0 a -^1 ( J , + ( i + 1) h )) a - i - 1 ( J + ( i + 1) h ))/ ( 1 -
-f(Ji,A, +0a,(J, -ih),A-(. +0a^(J, + dxi
+ ( i + 1) h ))( £ - ih ));
a - m = (. f ( J - m. A i , A - i ) + f ( J - i . A - i + d x
+ 0 a — i — 1 ( J — i — 1 + ( i + 1) h ), a , +0 ai ( J — i — 1 - ih )) • ■ a , ( J - , - 1 - ih ) )/( 1 -
- f ( J - , - 1 , A - , +0 a - , - 1 ( J - , - 1 + ( i + 1) h ).
d x - i - 1
A , +0 a i ( J - i - 1 - ih ))( J - i - 1 + ( i + 1) h )).
Здесь Ai = b0 + ( a x + ... + a 0) h ,
A_l = b0 - (a_x +... + a ._x)h, t < Ji < ti+1. t -, -1 < J ,-1 < t-1, 0 <0<1 причем Найденные значения a;и b, подставим в (2). Получим приближенное решение x, (t), есть функция кусочно-непрерывная, осциллирующая, имеющая на данном промежутке непрерывную производную. Для простоты изложения рассмотрим предложенный метод нахождения приближенного решения в случае линейных уравнений вида x'(t) = P(t) x(t) + g(t) x(t) + r(t) (4) на отрезке [-L, L] с условием x(0) = x0. В этом уравнении функции p(t), g(t) и r(t) непрерывны на [-L, L ]. Отрезок [-L, L] разобьем на N частей с шагом h, а приближенное решение на каждом частичном промежутке будем строить в виде (2) x, (t) = a, (t - ih) + b , NN где , =--,--+1. 2 2 -,..., N у -1. Коэффициент b0 находим из начального условия, для определения коэффициентов b получаем формулы b, = a, -1h + bi-1 = a, -1h +a,-2 h + bi-2 = = h(a,x + a,2 + a; 3 +... + a0) + b0, i = 1, I ... N , у -1, если 0 < t< L ; bi = bi+2 — ai+1h -ah = bi+2 = b0 -h(a_j +...+ at), NN , =--,--+1 2 2 ,..., ... - (a,+1 + a,)h = -1, если -L< t< 0. ... Используя условие невязки осциллируемости ^i(t) = x,'(t) -P(t)x,(t) -g(t)x, (-t) -r(t). (5) (i+1)h j ^,( t) dt = 0, ih NN где i = -у ,y +1 .,..., N ,0,1,2,..., у -1, получим систему двух уравнений для нахождения a t и a_i_x на каждом из двух промежутков. Если 0 < t < L, то условие осцилли-руемости примет вид (i+1) h f (ai - Р(‘)(ai (‘ - ih) + b0 + h(ai-1 + ••• + a0)) -ih - g(t)(a - i-1 (t+ (i+1) h) +b 0 - h (a-1 +••• +a - i-1 )) - - r (t)) dt = 0, i = 1,2,,,,, N -1 В случае - L< t< 0 получим (i+1) h f(a - Р(t)(ai(t- ih) + b0 - h(a-1 + ••• + a )) - ih - g(t)(a - i-1 (t+ (i+1) h) +b 0 + h(a - i-2 +••• +a 0» - - r (t)) dt = 0, i = — ,-y +1,...,-1. Мы имеем систему двух уравнений с двумя неизвестными для нахождения коэффициентов at, a_, • Итак, будет построено приближенное решение данной задачи методом осциллирующих функций на промежутке [- L, L ] • Покажем, как можно оценить погрешность в данном случае. Определим погрешность построенного приближенного решения xi (t), удовлетворяющего условию (5) и на чальному условию xt (0) = x0 • Обозначив u(t) = x(t) - xN (t), получим, что u (t) удовлетворяет уравнению u'(t) = p(t)u(t) + g(t)u(-t) - ^(t) (6) и начальному условию u (0) = 0 • Погрешность будем оценивать на каждом промежутке. Введем следующее обозначение: ui (t) = x (t) - xi (t), где i = NNN --,---+ 1,•••,1 • 2 22 Проинтегрировав (6) на участке 10 < t < 11, 10 = 0, получим tt u0 (t) - u0 (0) = f p(t)u0 (t)dt + f g(t)u0 (-1)dt - 0 0 t -f Mt) dt, так как u (0) = 0, будем иметь ttt u° (t) = f Р(t)u° (t)dt + f g(t)u° (-1)dt - f k (t)dt' 0 00 Оценим |u0 (t )|, получим max |u„ (t )| < max |u„ (t )| maxi p (t )| h + 0< t < t) 1 0 1 0< t < t) 1 0 1 0< t < t) 1 1 + max lu . (t)lmaxlg(t)|h + max la. (t)|h• t -) < t <0' 1 1 0< t < tJ 1 0< t < tJ 0 1 Предположим, что max|p(t)|h < 1, это можно сделать, выбрав разбивку или шаг h. Тогда получим оценку |u0 (t )| maxiun (t)| < 0<t< t! 1 1 maxu-1(t) maxg(t)h+max k(t) h 1 - maxip(t)|h 0< t< t, 1 1 • (7) Теперь проинтегрируем (6) на участке tj < t < t2: tt u1 (t) - u1 (tx) = f p(t)u1 (t)dt + f g(t)u1 (-1)dt - t 1 t 1 t - f ^j (t) dt, ‘ 1 tt u1 (t) = щ (^) + f p(t)щ (t)dt + f g(t)u (-1)dt - t 1 t - f ^! (t) dt, t 1 так как щ (tY) = u0 (tj) • Предположим, что maxip(t)|h < 1, это можно сделать, выбрав t !< t < 12 1 разбивку или шаг h . В результате получим maxlu. (t)| < ‘ 1 <‘< ‘ 21 max |u_, (t)| max |g(t)|h + max k. (t)|h + max |un (t, )| t_ 2< ‘ < ‘.J 1 t! < ‘ < ‘j1 1 ‘{ < ‘ < ‘j1 1 ‘{ < ‘ < ‘j1 1 1 - maxip(t)|h ‘ 1 <‘< ‘ 21 Использовав метод полной математической индукции, получим оценки для |u; (t)| в случае, если i > 0 и i< 0, Имеем max (t )| < t^ t < ti+,1 max \u_t4(t)| max Ig(t)|h + max k (t)|h + max |«._j(tt)| <t-,-1 < t< tJ t< tj 1 ti< t< tj 1 ti< t< tj 1 1 - max Ip(t)l h ti^t < ti+i при i > 0, max Ip(t)|h < 1 • t 1V Аналогичным образом получаем формулы при i< 0: max lui(t)| < ‘is ‘< ti+1' max lu-i4(t)| max Ig(t)|h + max к(t)|h + max lui+1(ti)| < ‘-i£‘S‘-i+1 i<‘<‘i+1 ' ‘i<‘<‘i+1 ' ‘i<‘<‘i+1' Шаг подбирается так, чтобы выполнялось условие h <-----i----г. max p(t) t^t ^ t,+11 В качестве примера рассмотрим урав- x (t) x (-1) _(2 нение xa t) = + -?—— + e - с начальным t + 5 t2 + 4 условием x(0) = 0, t e [—0,5;0,5], с h = 0,1. Согласно методу осциллирующих функций решение на каждом промежутке разбиения ищем в виде xi (t) = ai (t — hi) + bi, где i = —5,—4,...0,1,2,3,4. С помощью рассмотренной выше теории пример был реализован в пакете Mathe-matica, на рисунке изображен график полученного решения, максимальная абсолютная погрешность 0,029. График построенного решения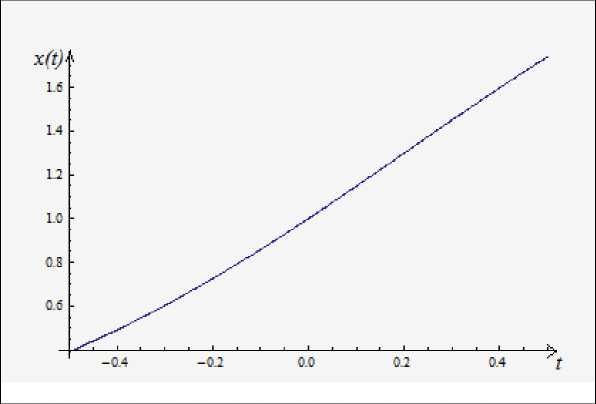
Список литературы Приближенное решение дифференциальных уравнений с отражением аргумента
- Aftabizateh A.R., Huang Y.K. Bounded solutions for differential equations with reflection of the argument//J. Math. Anal. and Appl. 1988. Vol. 135.
- Ма T.F., Miranda E.S., De Souza Cortes M.B. A nonlinear differential equation involving reflection of the argument//Archivum Mathematicum (BRNO). 2004.T. 40.
- Ведь Ю.А., Матраимов М.Т. Вопросы корректности, ограниченности и стабилизации решения задачи Коши для дифференциальных уравнений с отражением аргумента//Исследования по интегродифференциальным уравнениям. Фрунзе: Илим, 1989. С.73-85.
- Матраимов М.Т. О существовании ограниченного решения систем дифференциальных уравнений с отражением аргумента//Исследования по интегродифференциальным уравнениям. Фрунзе: Илим, 1989. С.86-90.
- Воронина Н.В., Маланин В.В., Рекка Р.А. Осциллирующие функции и некоторые их приложения. Свердловск: Изд-во Урал. унта, 1990. 111с.
