Прибор для исследования распределения ионов, образовавшихся при высокоскоростном соударении твердых тел

Автор: Смкин Н.Д., Дорофеев А.С., Телегин А.М.
Журнал: Физика волновых процессов и радиотехнические системы @journal-pwp
Статья в выпуске: 1 т.18, 2015 года.
Бесплатный доступ
В статье описан прибор для исследования распределения в пространстве ионов, образовавшихся при высокоскоростном соударении твердых тел. Предложен вариант конструктивной и структурной схемы прибора, увеличивающий достоверность информации о физических параметрах ударяемого твердого тела. Прибор предоставляет возможность исследования распределения образовавшихся ионов в пространстве при различных углах соударении твердых тел. Рассмотрены движения ионов, попадающих в систему электродов под различными углами к электрическому тормозящему полю.
Прибор для исследования распределения ионов, космическое пространство, ион, удар, электрическое поле, микроконтроллер, аналого-цифровой преобразователь
Короткий адрес: https://sciup.org/140255903
IDR: 140255903 | УДК: 53.08
Instrument for investigating the distribution of ions formed at high-speed collision of solids
This paper describes a device for studying the spatial distribution of ions formed at high-speed collision of solids. A variant of the construction and structural scheme of the device, which increases the accuracy of the information about the physical parameters of a rigid body strikes. The device provides the ability to study the distribution of ions formed in space at different angles of the collision solids. Consider the motion of ions in the electrode system at different angles to the electric field inhibitory.
Текст научной статьи Прибор для исследования распределения ионов, образовавшихся при высокоскоростном соударении твердых тел
В настоящее время космические аппараты (КА) проектируются с учетом длительного пребывания в космическом пространстве. Элементы конструкций КА в полете подвергаются влиянию факторов космического пространства, в частности, воздействию твердых тел космического мусора, что может привести к выходу из строя оборудования (солнечные батареи, антенны, радиаторы и т. д.) [1].
Процесс регистрации твердых тел заключается в изучении физических явлений, вызываемых высокоскоростным ударом. К таким явлениям относят нагрев материалов, электромагнитное излучение, ионизацию материала ударника и др.
При ударе твердых тел массой m и скоростью V происходит образование ионов. Суммарный заряд ионов Q при высокоскоростном соударении твердых тел определяется известным параметрическим выражением [1]
Q = cm α V β , (1) где с , α , β – коэффициенты, полученные эмпирическим путем, зависящие от материала ударника и мишени [2].
Зависимость (1) положена в основу проектирования преобразователей ионизационного типа, которые имеют наибольшую чувствительность при измерении микрометеороидных и техноген- преобразователь.
ных частиц. Конструктивные схемы некоторых из них исследованы в [2]. В частности, рассмотрен преобразователь с приемником в виде системы плоскопараллельных пластин, выполненный по схеме двухфазной решетки и в виде системы тонких проводников.
Результаты расчетов [2] показали, что преобразователь с приемником в виде системы плоскопараллельных пластин обладает меньшим коэффициентом потерь и, соответственно, лучшим сбором ионов, пропорциональным ширине пластин.
Для улучшения коэффициента сбора, особенно при высоких скоростях соударения, необходимо увеличивать напряжение собирающего поля, ширину пластин, уменьшать расстояние между пластинами или приближать приемник ионов к мишени [2].
Изменение геометрии жалюзи приводит к резкому уменьшению прозрачности приемника при отклонении траектории полета частицы от перпендикулярного по направлению к плоскости мишени. В связи с этим оказывается более выгодным использование преобразователя с приемником в виде параллельных нитей, которые позволяют практически без изменения прозрачности резко сократить расстояние между нитями и получить удовлетворительный коэффициент сбора ионов [2].
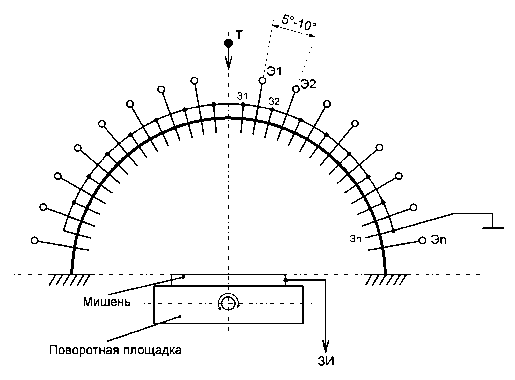
Рис. 1. Схема прибора для исследования распределения ионов
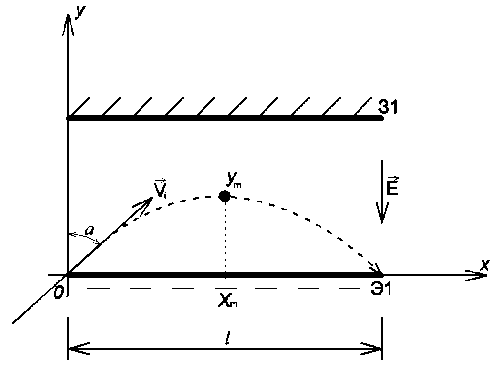
Рис. 3. Тормозящее движение иона под углом к электрическому полю, а < 90 °
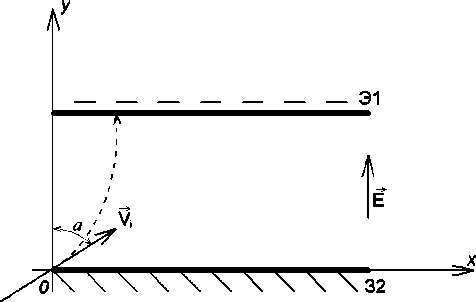
Рис. 2. Движение иона под углом к электрическому полю, а > 90 °
Для увеличения достоверности информации о частицах за счет увеличения эффективной площади сбора их с мишени, а также для изучения распределения в пространстве разлетающихся частиц предлагается конструктивная схема прибора, изображенная на рис. 1. Данный прибор помещается в вакуумную камеру ускорителя заряженных частиц [3], который позволяет получать скорости до 10 км/с для частиц микронных размеров. Система измерения выполнена по схеме двухфазной решетки в виде системы плоскопараллельных пластин или системы тонких проводников, расположенных по полуокружности напротив мишени. Мишень, в свою очередь, располагается на поворотной площадке, что позволяет проводить исследование распределения образовавшегося ионного облака при различных углах удара твердого тела.
При ударе образуются ионы, имеющие определенное распределение в пространстве, разлетающиеся в обратном направлении от удара. При этом также образуются электроны, которые частично захватываются самой мишенью и в дальнейшем заземленным электродом.
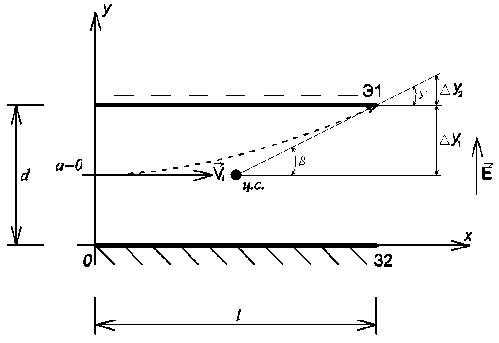
Рис. 4. Движение иона перпендикулярно к электрическому полю, а = 90 °
Приемные электроды Э1, Э2, …, Эn выполнены в форме сеток (нитей) и находятся под отрицательным потенциалом до -100 В, который создает электрическое поле между приемными электродами Э1, Э2, …, Эn и заземленными электродами З1, З2, …, Зn. Отрицательные электроды располагаются друг от друга под углом 10°.
Положительно заряженные ионы, попадая в электрическое поле, созданное между электродами, затормаживаются, изменяя свое направление в сторону электрода, находящегося под отрицательным потенциалом. Положительные ионы возбуждают импульс тока I на входе усилителей, подключенных к собирающим электродам:
I ( . ) = d p), dt
где Q + (t ) — заряд, собранный приемным электродом.
Анализируя захват ионов электрическим полем, созданным между электродами в предлага- емой системе, необходимо рассмотреть движение ионов, влетающих в тормозящее поле под различными углами, как движение положительной частицы с зарядом q в электрическом поле конденсатора с напряженностью E под действием постоянной электростатической силы F [4]: * *
F = qE . (3)
На рис. 2–4 рассмотрены варианты влета ионов от угла а к электрическому полю между приемным электродом Э1 и заземленным электродом.
Рассмотрим случай, когда начальная скорость иона V — i с массой m i и зарядом q i , влетающего в промежуток с электрическим полем E , направлена под углом а к полю, а > 90 ° (рис. 2).
Движение иона складывается из двух составляющих. Во-первых, ион движется по инерции вдоль оси x с постоянной скоростью, во-вторых, ион будет двигаться равнопеременно по оси у под действием постоянной силы F , которая действует на него в электрическом поле по направлению к отрицательно заряженному электроду.
Система уравнений для координат траектории иона имеет вид:
dx .
_ dr= V sin а ;
dx q^E
— = —— t + Vt cos а .
dt m i
Решая систему уравнений (4), получим урав- нение для траектории движения иона для дан- ного случая:
dy = q , E x + V i cos а dx m i V 2 2 sin2 а Vt sin а
Соотношение (5) описывает квадратичную зависимость, следовательно, траектория является параболой, положение вершины которой зависит от угла влета а .
Теперь рассмотрим торможение под углом к полю, а < 90 ° (рис. 3) к электрическому полю. Траектория будет описываться зависимостью (5), но с противоположным знаком из-за смены направления электрического поля:
dy dx
qiE x mi V2 sin2 а
+ ctg а .
Видно, что траектория является параболой, но ветви направлены вниз.
Координата вершины параболы равна mV2
x = i i sin 2 а , m 2 q i E
У т = 4 l tg а ,
где l – длина электродов.
Рассмотрим еще один случай, когда движение иона перпендикулярно к электрическому полю, а = 90° (рис. 4), угол отклонения иона у = в в зависимости от энергии частицы WKi :
tg Y =
qtE i = qiU откл l mi Vi 2 2 WKi d ,
где Uоткл – отклоняющее напряжение; d – рас- стояние между электродами.
Поперечное смещение электрона в пределах отклоняющей системы:
1 qE l 2
Л У 1 = о--2 ’
2 mi V 2
Поперечное смещение иона на расстоянии x от центра системы определяется соотношением:
Л y = x tg а= q t U OTKM -x . (10)
2 W Ki d
Из рассмотренных случаев следует, что различные начальные углы влета ионов к направлению электрического поля между электродами приводят к разному времени прилета ионов на собирающий электрод с разных углов. Также вылет частиц из системы зависит от определенных значений угла, параметров ударяемой частицы, параметров приемных электродов и напряженности поля между электродами.
Структурная схема обработки информации прибора изображена на рис. 5.
Электронная обработка заключается в особо точной синхронизации приемников за счет одновременного запуска аналого-цифровых преобразователей (АЦП), преобразующих в цифровой код сигнал, снимаемый с приемных электродов Э1, Э2, …, Эn. Тактирование АЦП осуществляется от генератора тактовых импульсов (ГТИ). Запуск ГТИ осуществляется компаратором, который соединен через операционный усилитель (ОУ) с мишенью. Компаратор срабатывает от импульса, возникающего при соударении твердого тела о мишень. Каждый отсчет от АЦП записывается в скоростное электронно-стираемое программируемое постоянное запоминающее устройство (ЭСПЗУ), по окончании измерения данные из ЭСПЗУ обрабатываются микроконтроллером (МК) и передаются в персональный компьютер (ПК) для последующей обработки. Связь МК с ПК осуществляется через оптиче-
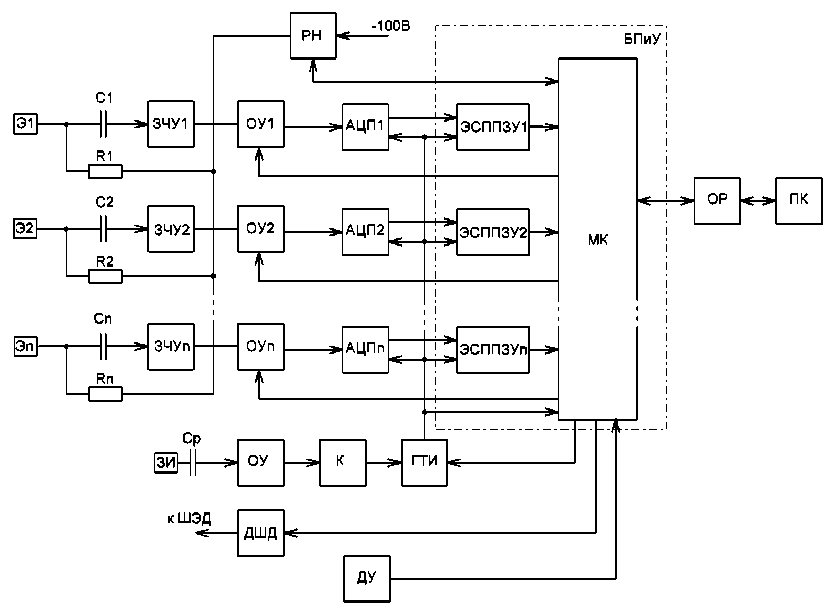
Рис. 5. Структурная схема обработки информации
скую развязку (ОР), служащую для гальванической развязки МК с ПК.
Зарядочувствительные усилители ЗЧУ1, ЗЧУ2, ЗЧУn преобразуют ток ионного импульса в напряжение, которое усиливается операционными усилителями ОУ1, ОУ2, …, ОУn. Коэффициент их усиления может регулироваться микроконтроллером в зависимости от физических параметров ударяемого тела. Разделительные конденсаторы С1, С2, …, Сn отсекают отрицательный высокий потенциал от входа ЗЧУ. Регулятор напряжения служит для регулировки отрицательного потенциала, подаваемого на приемные электроды через развязывающие резисторы R1, R2, …, Rn. За счет изменения этого отрицательного потенциала на электродах изменяется и напряженность тормозящего электрического поля, и тем самым осуществляется подбор коэффициента сбора ионов.
Микроконтроллер также подключен к шаговому электродвигателю через драйвер шагового двигателя для осуществления позиционирования поворотной площадки по углу удара. Для контроля угла поворота площадки к микроконтроллеру подключается датчик угла.
Блок преобразования и управления в последующем возможно заменить программируемой логической интегральной схемой (ПЛИС), что увеличит скорость обработки информации, даст возможность для последующего увеличения количества ячеек памяти и уменьшит габаритноконструктивные параметры схемы обработки устройства.
Заключение
Предлагаемая схема прибора позволяет увеличить достоверность информации о частице за счет увеличения эффективной площади сбора, предоставляет возможность сбора ионов независимо от места соударения частицы и позволяет исследовать распределение ионов, образовавшихся при высокоскоростном соударении твердых тел в пространстве под различными углами удара твердого тела.
Работа выполнена при поддержке гранта РФФИ № 14-03-97002 р_поволжье_а.
Список литературы Прибор для исследования распределения ионов, образовавшихся при высокоскоростном соударении твердых тел
- Сёмкин Н.Д., Телегин А.М., Изюмов М.В. Использование открытых элементов космического аппарата в качестве датчиков микрометеоритов и космического мусора//Прикладная физика. 2010. № 4. С. 131-136.
- Сёмкин Н.Д., Телегин А.М. Преобразователи информации в электронных устройствах бортовых систем: учебное пособие. Самара: Самарский государственный аэрокосмический университет имени академика С.П. Королева, 2012. 307 с.
- Имитация микрометеоритов с помощью электродинамического ускорителя/Н.Д. Сёмкин //Приборы и техника эксперимента. 2009. № 4. С. 159-165.
- Вайсбурд Д.И., Макиенко А.В. Лабораторный практикум по атомной физике. Томск: Томский политехнический университет, 2007. 120 c.
