Применение графического процессора Tegra K1 в задачах обработки изображений на борту БЛА

Автор: Тарасов Александр Дмитриевич, Краснянский Александр Сергеевич
Рубрика: Краткие сообщения
Статья в выпуске: 3 т.17, 2017 года.
Бесплатный доступ
Представлена схема устройства обработки и хранения графической информации, получаемой от полезной нагрузки на борту БЛА. Определен потребный функционал устройства. Рассмотрены различные варианты обработки потоковой видеоинформации, выявлены наиболее оптимальные алгоритмы. Проведено компьютерное и натурное моделирование, результатом которого является разработка макета и экспериментального образца устройства. Проведены стендовые и летные испытания образца устройства в составе летающей лаборатории на базе СВС-А20 и АК с БЛА «Юпитер». Результаты исследований лягут в основу разработки на базе данного образца серийного устройства. Рассмотрены перспективы развития данного направления.
Бла, обработка изображений, распознание образов, мониторинг местности
Короткий адрес: https://sciup.org/147155204
IDR: 147155204 | УДК: 629.7.066.1 | DOI: 10.14529/ctcr170320
Usage of graphic processor Tegra K1 in image processing application on board UAVs
Presented in this paper is the design for a device for the processing and storage of graphic information, received from payload onboard a UAV. Defined the required functionality of the device. Reviewed the different variants for processing the flow of video frames. Defined optimal algorithms. Conducted computer and full-scale simulation, the result of research and experimental model of the device. Conducted ground and flight tests of the device using a flight laboratory SVS A20 and AK with the UVA “Jupiter”. Research results provide the basis for development for serial production of the device. Reviewed perspectives on the development of current trends.
Текст краткого сообщения Применение графического процессора Tegra K1 в задачах обработки изображений на борту БЛА
БЛА становятся все более популярным в повседневной жизни, они стремительно перешли от сугубо военного применения [1] в использование любителями и специалистами в различных отраслях. Потребительский рынок стремительно растёт и уже предлагает широкий спектр БЛА от микро- и мини- до полноразмерных самолётов.
Небольшие БЛА способны решать локальные задачи в условиях города. Это обусловлено ограниченностью и несовершенством источников питания для электрических двигателей коптеров. Малая ёмкость батарей не позволяет использовать БЛА на больших расстояниях, где они пригодились бы, например, для патрулирования местности или обновления оперативной информации в ходе ликвидации чрезвычайных ситуаций. Применение БЛА с ДВС позволяет решить проблему с дальностью работы таких аппаратов, что делает возможным их использование для решения специфических задач, что, в свою очередь, позволяет достигать существенной экономии в материальных и людских ресурсах, обеспечивая наилучшее качество.
-
1. Основная часть
Ввиду сложности передачи большого объёма видеоданных по радиолинии на больших удалениях БЛА возникает задача обработки этих данных на борту. А именно: наложение знакосинтезирующей информации на изображение; запись отснятого материала; распознавание образов (в том числе фильтрации); сопровождение объектов и т. д.
Существует несколько возможных способов реализации обработки видеопотока на борту БЛА. Все они имеют свои преимущества и недостатки. Авторами были предъявлены следующие требования к разрабатываемой системе: минимальные массогабаритные параметры; минимальное энергопотребление к скорости обработки (псевдо-реальное время) и скорости разработки, рассмотрены три варианта построения системы: обработка изображений на процессорах общего назначения (CPU x86-64), на графических процессорах и на ПЛИС микросхемах. Проведя обзор литературы [2, 3], нами были сделаны следующие выводы.
-
• В [2] представлены зависимости производительности GPU, CPU и FPGA, из которых видно, что для решения конкретных задач GPU хорошо фильтрует, за ним идёт CPU и только потом FPGA; GPU хуже всего подходит для стерео-зрения, затем CPU и за ним FPGA; GPU лучше CPU, но хуже FPGA в задачах классификации.
-
• Согласно [3] реализация алгоритмов обработки изображений на FPGA занимает значительное время (хотя позволяет достигать минимального электропотребления, в отличие от реализа-
- ции тех же задач на GPU). К тому же, кроме скорости разработки, GPU имеет гибкие возможности, а также множество библиотек, реализующих различные алгоритмы, в том числе популярные на данный момент сверточные нейронные сети.
Исходя из поставленных задач, авторами выбрана схема на базе встраиваемой платформы Jetson TK1, предназначенной для разработок с использованием технологий графических ядер в области обработки изображений и сложных параллельных вычислений. Данная система имеет следующее ТТХ: четырёхъядерный Cortex-A15 с частотой 1,5 ГГц и 192 графических процессора.
Была предпринята попытка использовать данную систему для решения задач патрулирования с БЛА. Для нормальной работы систему Jetson TK1 необходимо обеспечить мощностью 60 Вт (пиковая), что легко решается добавлением генератора к ДВС.
Система в первом приближении должна содержать: камеру с гиростабилизированной платформой; накопитель для записи видеопотока; модуль навигации; блок обработки и принятия решений; дисплей для отображения видеопотока.
На рис. 1 представлена структурная схема экспериментальной установки.
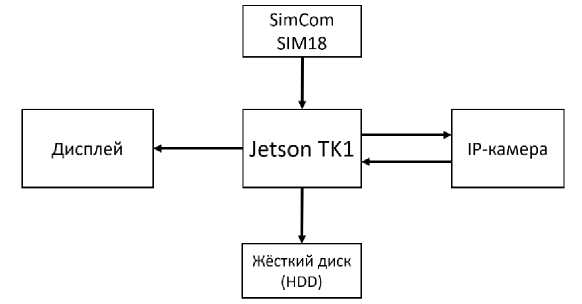
Рис. 1. Блок-схема устройства
В ходе работы авторами была реализована схема, представленная на рис. 1, воплощена в действующее устройство, представленное на рис. 2 (во время отладки на земле), разработана схема.

Рис. 2. Сборка системы, тестирование и отладка
Камера соединена с микрокомпьютером Jetson по Ethernet интерфейсу, который обеспечивает высокую пропускную способность (до 100 Мбит/с). Жёсткий диск подключён к разъёму SATA3. Плата GPS (SimCom SIM18) подключена через UART-USB преобразователь PL2032 к USB.
Используемая IP-камера выдаёт картинку в формате Full HD (1080p) по протоколу RTSP, используется контейнер h264. При этом используемая камера выдаёт картинку с задержкой в
Краткие сообщения
0,5 секунды (что учитывается нашим программным обеспечением при наложении GPS-координат). Это связано с программной частью в самой камере, на которую, к сожалению, мы не можем влиять. Кроме всего прочего данная камера имеет интерфейс управления через UART, что позволяет менять угол поворота, управлять фокусным расстоянием линзы и зумом. Данные о местоположении берутся с SimCom SIM18, который выдаёт GPS-координаты по UART-интерфейсу. Ввиду отсутствия UART-порта на самом Jetson используется UART-USB преобразователь.
Полевые испытания устройства были проведены на самолете Аэропракт А-20, а также на БЛА «Юпитер» производства КБ «Аэростарт».
В ходе разработки авторы столкнулись с рядом трудностей, связанных с кодировани-ем/декодированием видеосигнала. По умолчанию система использует программную кодиров-ку/декодировку видео, что сказывается на количестве кадров в секунду (далее FPS). Нагрузка настолько большая, что FPS падает до 10 кадров в секунду. Ввиду специфичности системы не все программные компоненты доступны на данной платформе (архитектура процессора – ARM). Однако использование аппаратного кодирования/декодирования существенно увеличивает производительность системы. Используя библиотеки GStreamer, авторам удалось применить аппаратные средства, доступные на миникомпьютере для кодировки/декодировки контейнера h264. Производительность поднялась до 20–25 кадров в секунду, а также были устранены артефакты.
Пример съёмки с наложенными данными (время и место съёмки) представлены на рис. 3.

Рис. 3. Пример полученного изображения с наложенной графикой
Вес устройства составляет порядка 5 килограмм (компьютер и гиростабилизированная платформа). Применение такой системы на борту БЛА позволит патрулировать такие индустриальные и протяжённые объекты, как линии электропередач и газопроводы. Стоимость мониторинга существенно снижается по сравнению с использованием для этих целей вертолётов (при том же запасе хода). Требуется минимальный людской персонал.
Заключение
Полученные результаты наглядно демонстрируют перспективность использования подобных систем на борту БЛА и лягут в основу разработки экспериментального образца полезной нагрузки для БЛА. В дальнейшей работе планируется использовать более современную и мощную систему, которая пришла на замену TK1 – Jetson TX1. В данный момент проходит испытание разработанная авторами система мониторинга для БЛА «Юпитер», которая позволит бортовому компьютеру получать параметры летательного аппарата, что будет крайне полезно для автономной работы дрона в рамках работ по мониторингу.
Список литературы Применение графического процессора Tegra K1 в задачах обработки изображений на борту БЛА
- Чаховский, Ю.Н. Возможности использования беспилотных летательных аппаратов в военных целях/Ю.Н. Чаховский, Б.С. Ковязин//Наука и военная безопасность. -2008. -№ 2. -С. 38-40.
- Asano, S. Performance comparison of FPGA, GPU and CPU in image processing/S. Asano//International Conference on Field Programmable Logic and Applications, IEEE. -2009. -P. 126-131.
- Fykse, E. Performance Comparison of GPU, DSP and FPGA implementations of image processing and computer vision algorithms in embedded systems: Master of Science in Electronics thesis/E. Fykse. -Norwegian University of Science and Technology, Faculty of Information Technology, Mathematics and Electrical Engineering, Department of Electronics and Telecommunications, 2013.
