Применение метода имитационного моделирования испытаний для обеспечения надежности элементов ходовых систем гусеничных машин

Автор: Абызов Алексей Александрович, Березин Игорь Яковлевич
Рубрика: Контроль и испытания
Статья в выпуске: 2 т.13, 2013 года.
Бесплатный доступ
Описаны практические примеры реализации методики имитационного моделирования испытаний для обеспечения надежности элементов ходовой системы быстроходных гусеничных машин. Предложен способ задания типовых внешних воздействий, а также скорости при моделировании движения машины.
Условия эксплуатации, динамические нагрузки, усталостная долговечность
Короткий адрес: https://sciup.org/147151643
IDR: 147151643 | УДК: 629.114.2
Application of the method of simulation tests to ensure reliability of the components of running systems tracked vehicles
The article describes practical examples of methods of simulation modeling of tests to ensure the reliability of the components of running systems high-speed tracked vehicles. We propose a method of specifying the types of external influences, and speed in the modeling of the machine.
Текст научной статьи Применение метода имитационного моделирования испытаний для обеспечения надежности элементов ходовых систем гусеничных машин
В предыдущих публикациях авторами была предложена методика имитационного моделирования испытаний, использование которой позволяет прогнозировать динамическую нагружен-ность, а также характеристики прочностной надежности элементов гусеничного движителя быстроходных гусеничных машин на ранних этапах проектирования. На первом этапе методика предусматривает компьютерное моделирование движения машины по трассе. Полученные в результате расчетов процессы изменения обобщенных координат пересчитывают в процессы силового и кинематического взаимодействия элементов конструкции, и затем - в процессы изменения компонентов тензора напряжений в наиболее нагруженных зонах ответственных деталей. В дальнейшем, с помощью моделей накопления повреждений получают оценку ресурса рассматриваемой детали.
При реализации предлагаемой методики для моделирования движения машины по трассе необходимо задание комплекса основных факторов внешнего воздействия [1], в частности:
-
- двумерного поля микропрофиля местности, описывающего воздействие со стороны левой и правой колеи на ходовую часть (высоты микропрофиля под j- й подвеской i- го борта h i j ). Кинематическое возбуждение со стороны микропрофиля трассы определяет общий уровень и характер динамических процессов в системе «подвеска - корпус - гусеница - силовая установка», а также накладывает ограничение на скорость движения машины в связи с интенсивными перегрузками, действующими на экипаж;
-
- дорожной кривизны (радиус поворота R ), которая значительно ограничивает скорость движения машины по заносу и приводит к перераспределению усилий в ходовой системе и трансмиссии;
-
- макропрофиля трассы (угол подъема - спуска у п ), описывающего длинные подъемы, спуски и накладывающего ограничения по тяговой и тормозной характеристикам;
-
- одиночных препятствий (выступы или впадины длиной L и высотой или глубиной H), наличие которых на местности существенно изменяет скорость движения и вызывает возникновение пиковых нагрузок в связанной динамической системе;
-
- механических характеристик грунтовой поверхности трассы, определяющих условия взаимодействия движителя транспортной машины с грунтом и характер нагруженности элементов ходовой системы;
-
- распределения переменных сил сопротивления грунта прямолинейному движению и повороту;
-
- параметров, описывающих условия наблюдения и оценивания факторов внешней среды человеком-оператором (расстояние видимости трассы L v ).
Сочетание перечисленных факторов характеризует условия движения машины по местности. Для их задания удобно использовать картографические описания трасс известных испытатель- ных станций и полигонов, которыми располагают отрасли — производители сельскохозяйственной, автомобильной, дорожно-строительной и другой инженерной техники. К настоящему времени накоплены достаточно подробные сведения о типовых испытательных полигонах, в которых задаются условия круглогодичной эксплуатации соответствующих транспортных средств в различных природно-климатических регионах. Пример описания трассы одного из полигонов представлен на рис. 1.
Совокупность факторов внешнего воздействия определяет функцию изменени я скорости движения по заданной трассе, которая в значительной мере влияет на эксплуатационную нагру-женность ходовой части и силовой установки машины. Необходимость учета этого обстоятельства подтверждают экспериментальные и расчетные исследования. Например, расчетн ы е среднеквадратические отклонения катковой нагрузки, полученные для средней скорости движения по трассе, почти в 1,5 раза превышают аналогичные экс п ериментальные значения, соответствующие режиму естественного вождения гусеничной машин ы . Такое отличие мож е т привести к принципиальной ошибке в оценке долговечности.
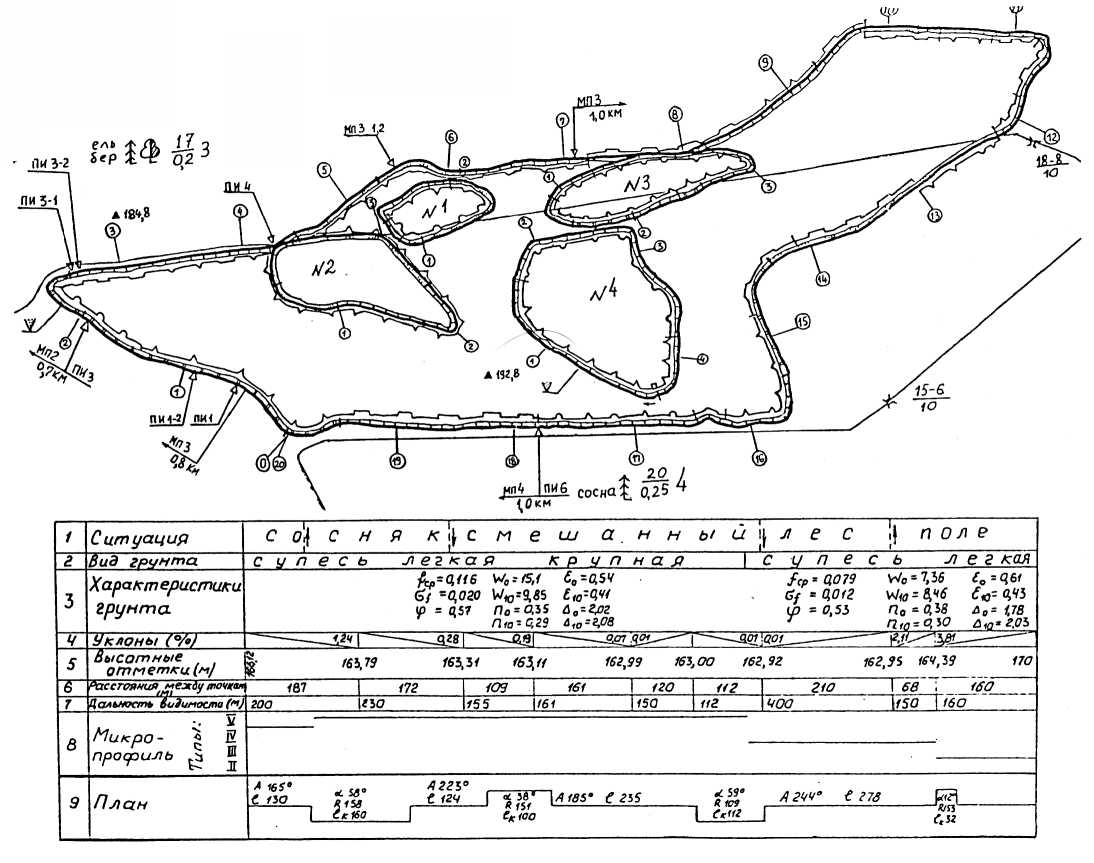
Рис. 1. Описание трассы полигона
В связи с отмеченной особенностью при модел и ровании используетс я подсистема, формирующая управляющие воздействия на двигатель и трансмиссию, приводящ и е скорость движения в соответствие с характеристиками трассы [2]. Предлагаемый подход основан на представлении о том, что благодаря управляющим воздействиям человека-оператора функция изменения скорости приводится в соответствие с дорожной обстановкой (ситуацией) при условии минимума времени, затрачиваемого на преодоление характерных участков местности. Система ограничений скорости включает:
-
- ограничения по пиковому значению при прео д олении больших одиночных нер о вностей и по величине среднеквадратического отклонения вер т икального ускорения на месте водителя при движении по трассе;
-
– ограничение по заносу машины при прохождени и криволинейных участков трассы ;
-
– ограничение по тяговой динамике, определяем о е тяговой характерис т икой сило в ой установки;
-
– ограничение, связанное с возможностью осуще с твления операций наблюдения и о ценивания дорожной ситуации.
Ограничения скорости по каждому из перечисленных факторов определяются путе м предварительных расчетов для рассматриваемой машины.
Проверка адекватности предлагаемого подхода в ы полнена на примере БМП-2. Моделирование движения проводилось для трассы, использовавшейся в экспериментальных исследованиях кафедры гусеничных машин Курганского государственного университета. В ходе экспериментов были зафиксированы характеристики трассы, а также ряд силовых и кинемат и ческих параметров движущейся машины.
Для определения ограничений скорости по пиковому значению и по величине среднеквадратического отклонения вертикального ускорения на м е сте водителя были проведены расчетные эксперименты. При этом скорость движения на каждом участке трассы опре д еляется в зависимости от двух факторов – типа микропрофиля и наличия одиночных препятстви й .
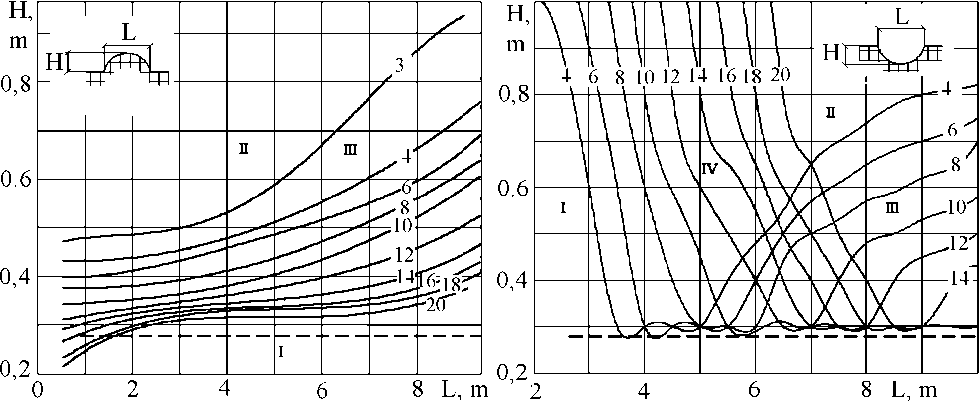
В качестве одиночного препятствия на участке трассы с микропрофилем определенного типа предлагается выделять неровности, переезд которых т ребует дополнительного снижен и я скорости, чтобы пиковое значение ускорения не превышало действующих в отрас л и санитарных норм. Значения максимальной скорости, на которой рассматриваемая машина может прео д олевать одиночные препятствия в виде выпуклости или впа д ины различной длины ( L ) и высоты ( H ), представлены на рис. 2. Анализ полученных результатов позволил выявить ряд закономерностей. При преодолении неровностей типа «выступ» возможен «пробой» подвески при наезде на неровность или «клевок» машины при съезде с неровности; наименьшая скорость требуется д ля переезда высоких и коротких неровностей (рис. 2, а). Неровности типа «впадина» могут преодолеваться двумя различными способами: на большой ско р ости, когда машина «перепрыгивает» препятствие, и на малой скорости – путем «переползания» (рис. 2, б).
а) б)
Рис. 2. Ограничения скорости при преодолении одиночных препятствий
Для участков местности, не содержащих одиночных препятствий, микропрофиль обычно описывается стационарными случайными функциями. В соответствии с отр а слевой классификацией микропрофиль каждого участка трассы, в зависи м ости от параметров неровностей, относится к одному из пяти типов. Для каждого из них с помощью тестовых расчетов определена максимальная скорость движения V max , при которой сред н еквадратическое откл о нение максимумов процесса изменения вертикального ускорения на месте водителя не превышает отраслев ы х санитарных норм.
Описание фрагмента трассы, использованной для расчета, представлено на рис. 3. Трасса содержит участки с микропрофилем I–III типов, одиночное препятствие, а также 11 крив о линейных участков различного радиуса и протяженности.
Как показывают результаты экспериментальны х исследований, при движении по криволинейным участкам на машине рассматриваемого типа водитель осуществляет серию кратковременных включений фиксированного радиуса механизма поворота. При таком алгоритме управления повороты даже большого радиуса оказываются состоящими из участков малого радиуса, на которых может возникать занос машины. Расчеты показали, что для исключения за н осов скорость необходимо дополнительно снижать по сравнению с обычно рекомендуемым значением.
Программа управляющих воздействий на механизм поворота для ка ж дого криво л инейного участка была сформирована на основе результатов предварительных расчетов.
На рис. 3 приведены ограничения скорости по рассматриваемым критериям для данного участка, а также результирующая функция изменения скорости. На основе этих данных с у четом физиологических возможностей водителя и особенностей системы управ л ения сформированы управляющие воздействия на модель трансмиссии, и с пользованные в дальнейшем.
|
Одиночные препятствия |
выпуклость Н= 6,45 м L= 2 м |
||||||||||||||||
|
3 Тип микропрофипя 2 1 |
|||||||||||||||||
|
200 Изменение 100 курсового 0 утла, град _ 100 -200 |
|||||||||||||||||
|
— |
— |
||||||||||||||||
|
______L |
111 |
||||||||||||||||
|
Минимальньпт 80 радиус бо поворота, м 40 20 |
— |
— |
— |
||||||||||||||
|
Ограничения 20 скорости, м/с - - - занос машины 10 одиночные ■ неровности ^ — тип профиля |
|||||||||||||||||
|
। |
1 |
1 |
1 !! |
1 |
1 1 |
i! |
1’ I' |
1 1 1 1 |
1 |
||||||||
|
-----L |
-р |
I н |
1 |
1 I-- |
м 1' |
1 1 1 1 |
1 |
||||||||||
|
• - - V |
* — • |
t -Н |
1 |
V |
м |
||||||||||||
|
Прогнозируемая 20 результирующая функция изменения скорости, м/с 5 |
|||||||||||||||||
|
Т" |
|||||||||||||||||
|
г |
J |
||||||||||||||||
|
__________1 |
I |
|—| |
—II— |
||||||||||||||
|
0 100 200 300 400 500 600 700 800 900 1000 1100 1200 Расстояние от начала участка S, м |
|||||||||||||||||
|
Рис. 3. Описание фрагмента трассы |
|||||||||||||||||
Номера передач для различных участков трассы, а также процесс изменения скорости, полученный в результате расчета, представлены на рис. 4; там же приведены экспериментальные данные. Отличие расчетного и экспериментального процессов изменения скорости по среднему значению и СКО не превышает 10 %. Учитывая, что процесс управления машиной в значительной степени определяется индивидуальными особенностями водителя, такой результат следует признать вполне удовлетворительным. В дальнейшем при моделировании движения предполагается использовать метод статистических испытаний, позволяющий учесть естественный разброс характеристик управляющих воздействий.
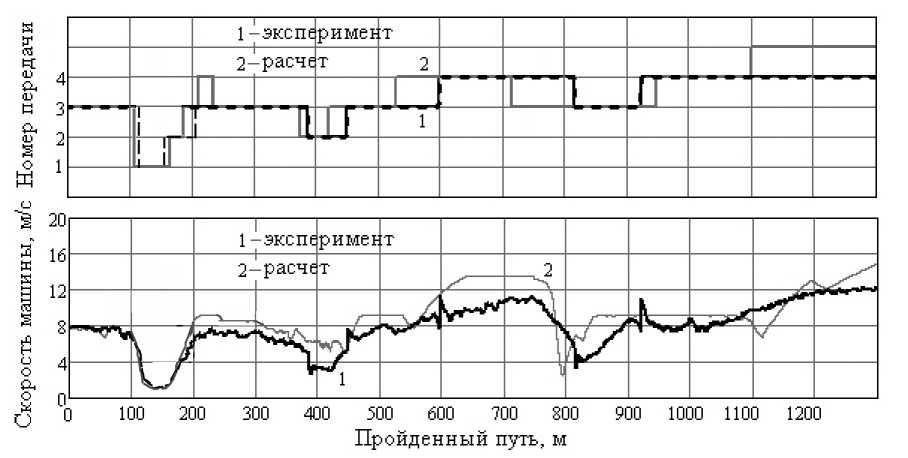
Рис. 4. Процесс изменения скорости при движении машины по трассе
Описанная методика расчетного прогнозирования характеристик надежности использовалась для решения ряда практических задач, в частности, дл я оценки изменения ресурса торсионов гусеничной машины класса 40 т при увеличении массы, связанной с установк о й дополнительного оборудования, а также для оценки эффективности мероприятий по усилению балансиров снего-болотоходной машины.
При оценке ресурса торсионов полученные в результате моделирования движения процессы изменения нагрузок, действующих на наиболее нагруженный каток машины, были пересчитаны в процесс изменения касательных напряжений, действующих в торсионном валу. В дальнейшем с помощью метода полных циклов из этого процесса были получены амплит у дные значения напряжений для каждого цикла нагружения. На рис. 5 приведен блок нагруж е ния, соотв е тствующий 1 км пробега в заданных условиях. В таком представлении информация об эксплуатационной нагруженности деталей может быть использована на этапе лабораторной доводки конструкций для обоснованного назначения программы стендовых испытаний с одной стороны, и расчетной оценки характеристик надежности, с другой. Для расчетной оценк и усталостной долговечности использовалась корректированная гипотеза линейного суммирования повреждений [3]. На рис. 6 сопоставлены расчетные функции вероятностей безотказной работы торсиона передней подвески гусеничной машины по критерию уста л остного разрушения, построенные с учетом разброса усталостных характеристик материала. Результаты соответствуют серийной машине и варианту машины с увеличенной массой ( L n , L – гарантийный и заданны й пробег машины). Анализ полученных результатов показал, что снижение ресурса находится в допустимых пределах.
В отличие от рассмотренного выше торсиона по д вески, большинство деталей ходовой системы быстроходных гусеничных машин работают в условиях многопараметрического случайного нагружения. Примерами таких деталей являются балансиры подвески. Процессы и з менения вертикальной и боковой нагрузок, действующих на к а ждый опорный каток машины при криволинейном движении, являются независимыми случайными процессами. Одн о временно, вследствие колебаний корпуса машины, происходит поворот балансира относительно корпуса также по случайному закону. В результате процессы изменения компонентов тензора напряжений в опасной точке оказываются слабо коррелированными случайными процессами. Стандартные методики расчета накопленного усталостного повреждения для такого случая о т сутствуют. В [4–6] предложена методика оценки усталостной долговечности, основанная на структурной модели материала и позволяющая проводить расчеты для многопараметрического слу ч айного нагружения.
Эта методика была использована при расчетах до л говечности балансира снегобол о тоходной машины ТМ-120 Курганского машиностроительного завода. Особенностью ходовой части машины высокой проходимости является применение широких гусениц, что приводит к значительному увеличению поперечного вылета балансиров, к оторые для уменьшения веса вы п олнены в виде тонкостенных сварных конструкций.
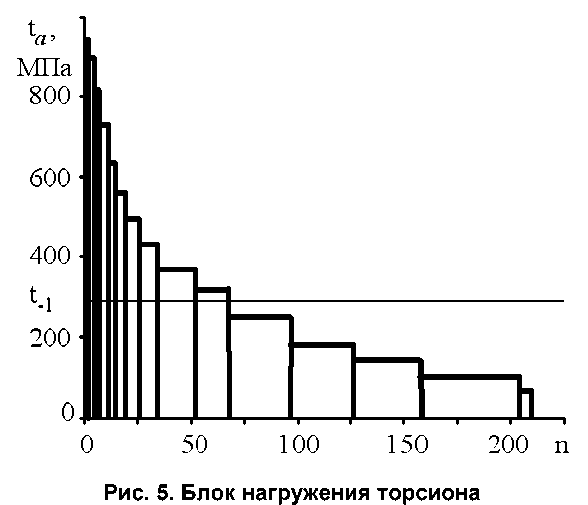
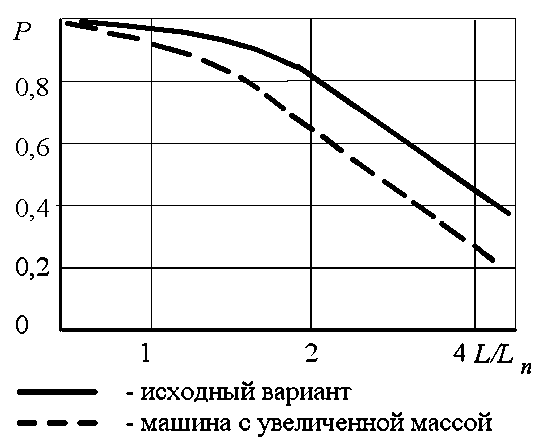
Рис. 6. Функция надежности торсиона передней подвески
Отмеченные особенности резко увеличивают их напряженность, в связи с чем при испытаниях опытных образцов ТМ-120 наблюдались частые у сталостные разрушен и я стебля б а лансира в области головки (рис. 7). Для исключения поломок н а этапе доводки опытных образцов в конструкцию балансиров был внесен ряд изменений: введены усиливающие накладки в области голов-
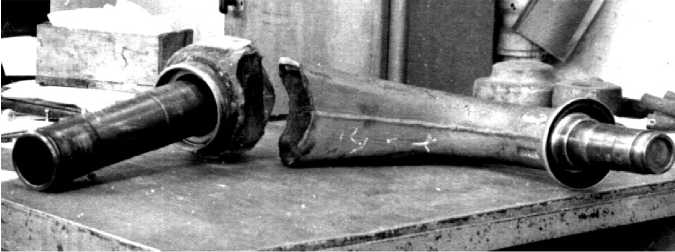
Рис. 7. Разрушенный балансир
ки и внутренняя поперечная перегородка, а для крайних подвесок – и внутренние продольные ребра в области изгиба. Для оценки эффективности этих изменений было выполнено сравнительное расчетное исследование долговечности исходного и усиленного вариантов балансиров. Характеристики трассы, использованные для моделирования движения, соответствовали трассе полигона Курганского машино- строительного завода.
Силы, действующие на каждый из опорных катков, представлены в ви д е трех составляющих ( F x , F y , F z ) (рис. 8, а) в системе координат x – y – z , связанной с корпусом машины. В связи с тем, что в процессе движения угол а непрерывно изменяется во времени, усилия, дейст в ующие на каток, также непрерывно меняют ориентацию по от н ошению к балансиру. П оэтому введена система координат X – Y – Z , связанная с балансиром (рис. 8, б), центр которой находится посередине оси катка. Плоскость X–Z совпадает с плоскост ь ю балансира, а ось Y ей перпен д икулярна. Теперь внешние нагрузки F x , F y , F z могут быть приведены к пяти силовым факторам P X , P Y , P Z , M X и M Z , неподвижным по отношению к телу балансира:
P z ( t ) = F x ( t) sin( a ( t)) + F z ( t ) cos( a (t )), P x ( t ) = - F z ( t) s in( a ( t)) + F x ( t) cos( a (t )),
PY ( t ) = Fy ( t), MX ( t ) = Fy ( t ) R CosM t )), MZ ( t ) = Fy ( t)R sin( a ( t)), где R – радиус опорного катка.
Таким образом, в процессе моделирования дви ж ения машины по местности проц е ссы изменения во времени сил F x , F y , Fz и угла а могут быть пересчитаны в процесс ы изменения нагрузок P X , P Y , P Z , M X и M Z .
Расчет мгновенных значений напряжений выполнен с применением стандартного пакета МКЭ. На первом этапе расчетов были определены компоненты напряженного состояния во всех элементах от действия единичных усилий PX, PY, PZ, MX и MZ. В качестве примера на рис. 9 пред- ставлена картина распределения эквивалентных напряжений для балансира без ребер от действия единичного усилия PX.
Анализ напряженного состояния позволил выделить опасные зоны:
-
- зона головки балансира, у сварного шва накладк и на наружной поверхности балансира;
-
- зона головки балансира, у сварного шва накладк и на внутренней поверхности балансира;
-
- зона изгиба тела балансира к оси катка.
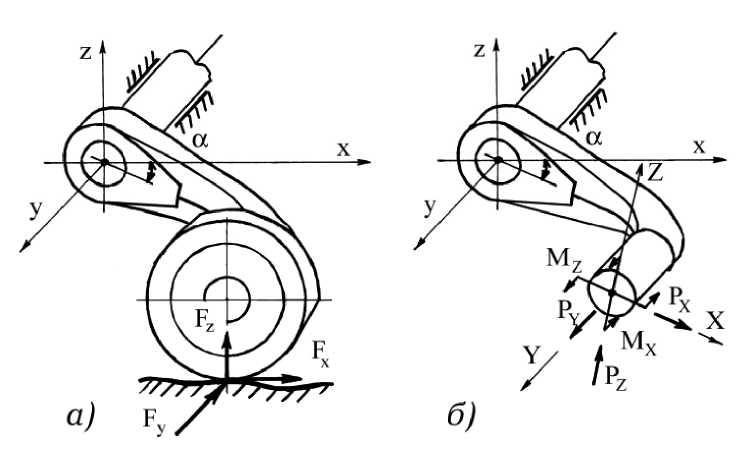
Рис. 8. Нагрузки, действующие на балансир
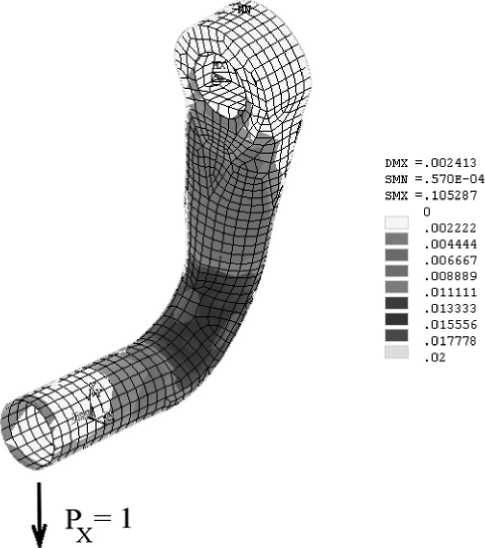
Рис. 9. Распределение напряжений в теле балансира
В каждой из названных зон анализировалось напряженное состояние в ряде точек: б ыли определены компоненты напряжений a n , aZ n , t ^ z n от дей с твия каждого из единичных усилий P X , P Y , P Z , M X и M Z , ( i и п - оси, лежащие в плоскости п- го ко н ечного элемента). В результате на первом этапе расчета для каждой опасной точки была подгото в лена матрица значений компонент напряженного состояния от действия каждой из единичных нагрузок.
Текущее значение компонент напряжений в каждой из опасных точек о п ределяетс я как линейная комбинация:
а 5 п ( t ) = a P X =1 ■ Px ( t ) + а р =1 ■ Р, ( t ) + a Pn =' ■ Pz ( t ) + a M X =' ■ Mx (t ) + a M Z = 1 ■ Mz (t ), a n n ( t ) = a P X = 1 ■ P x ( t ) + а р ,=1 • Р , ( t ) + а рП = 1 ■ P z ( t ) + <х = * ■ M x ( t ) + 0 , = 1 • M z ( t > • n ( t ) = т ' П n ' ■ Px ( t ) + T p Y nZ ■ Py ( t ) + ^ P Z ^1 ■ Pz ( t ) + t ^ X =1 • Mx ( t ) + T ^ Z ,=1 ■ Mz ( t ).
Таким образом, с помощью комплексной ЭВМ-программы, объединяющей задачу динамики движения машины с расчетом напряжений, удается получить реализации случайных процессов изменения во времени компонент напряжений в каждой опасной точке при движении машины по трассе. Затем по методике [6] для каждой из рассматриваемых опасных точек была получена оценка долговечности по критерию зарождения усталостной трещины. В качестве значения ресурса балансира принималось наименьшее из значений, полученных для всех рассматриваемых точек. Далее с учетом рассеяния усталостных свойств материала были построены функции надежности для первоначального и модифицированного вариантов конструкций балансиров (рис. 10). В качестве исходных данных использовались усталостные характеристики стали 30ХГСА, имеющей коэффициент вариации предела выносливости
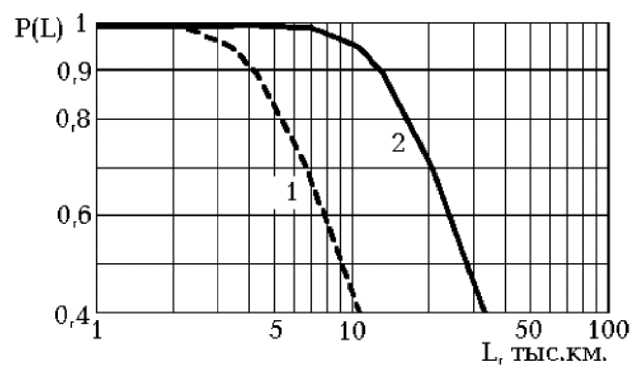
Рис. 10. Функции надежности балансира: 1 – исходный вариант; 2 – усиленный вариант конструкции
ϑσ -1 = 0,1; наличие сварных швов учитывалось ведением соответствующих коэффициентов концентрации. Анализ полученных результатов показывает, что гаммапроцентный ресурс ( γ = 90 %) новой конструкции повысился в 3 раза, что удовлетворительно согласуется с результатами опытной эксплуатации модернизированных машин.
Список литературы Применение метода имитационного моделирования испытаний для обеспечения надежности элементов ходовых систем гусеничных машин
- Савочкин, В.А. Статистическая динамика транспортных и тяговых гусеничных машин/В.А. Савочкин, А.А. Дмитриев. -М.: Машиностроение, 1993. -320 с.
- Березин, И.Я. Регулирование скорости в задаче моделирования движения транспортной машины по случайному профилю/И.Я. Березин, С.Ю. Будинский, П.В. Усольцев//Исследование силовых установок и шасси транспортных и тяговых машин. -Челябинск, 1985. -С. 118-121.
- Когаев, В.П. Расчеты на прочность при напряжениях, переменных во времени/В.П. Когаев. -М.: Машиностроение, 1993. -363 с.
- Абызов, А.А. Применение структурной модели для оценки усталости при многопараметрическом случайном воздействии/А.А. Абызов, О.С. Садаков//Вестник ЮУрГУ. Сер. «Математика, физика, химия». -2005. -Вып. 5. -№ 2 (42). -С. 73-79.
- Абызов, А.А. Модель накопления усталостного повреждения при произвольной истории напряжений. Идентификация и верификация/А.А. Абызов, О.С. Садаков, Н.О. Фельк//Вестник ЮУрГУ. Сер. «Математика, физика, химия». -2005. -Вып. 6. -С. 73-76.
- Абызов, А.А. Применение метода имитационного моделирования испытаний к расчету ресурса ходовой части транспортных машин/А.А. Абызов, И.Я. Березин, О.С. Садаков//Вестник ЮУрГУ. Сер. «Машиностроение». -2006. -Вып. 8. -№ 11. -С. 122-129.
