Применение метода конечных элементов к расчету больших перемещений плоской линейно-упругой конструкции

Бесплатный доступ
Предложенный вариант метода конечных элементов позволяет находить большие перемещения плоской линейно-упругой конструкции при заданных узловых нагрузках и, наоборот, нагрузки при заданных перемещениях. Расчетная модель включает в себя геометрические, статические и физические соотношения (закон Гука). Расчет показал, что одним и тем же нагрузкам могут соответствовать несколько разных деформированных положений конструкции. С целью верификации представленной модели в работе выполнен расчет чистого изгиба балки при больших перемещениях. Анализ полученных результатов показал адекватность предложенной модели, при этом результат заметно отличается от решения в пакете ANSYS.
Геометрическая нелинейность, большие перемещения, конечные деформации, чистый изгиб, плоское напряженно-деформированное состояние
Короткий адрес: https://sciup.org/147158691
IDR: 147158691 | УДК: 531
The finite element method use for large displacements calculations of plane linear-elastic structures
A proposed version of the finite element method can find large displacements of a plane linear-elastic structure with given nodal loads, and conversely, nodal loads at the given displacements. A calculation model includes geometrical, static and physical relations (Hooke's law). The calculation showed that several different deformed positions of the structure may correspond to the same loads. To verify the proposed model, the pure bending of a beam was calculated with large displacements taken into account. Analysis of the results showed the adequacy of the proposed model. At that the results differ markedly from the ANSYS solution.
Текст научной статьи Применение метода конечных элементов к расчету больших перемещений плоской линейно-упругой конструкции
Сов^еменная механика сплошной с^еды отличается большим ^азнооб^азием подходов к ^е-шению задачи о ^асчете больших пе^емещений конст^укций, ^азнооб^азен также и используемый тензо^ный а^сенал. Для описания нап^яженного состояния мате^иала наиболее ши^око используется тензо^ нап^яжений Коши [1–3], наследуемый п^актически без изменения из геомет-^ически линейного подхода, а также тензо^ы Пиолы–Ки^хгофа пе^вого и вто^ого ^ода [2, 3]. Еще большее количество тензо^ов описывает дефо^ми^ованное состояние мате^иала, нап^име^ [1–5]. Сюда относятся тензо^ы конечных дефо^маций Коши–Г^ина, Г^ина–Лаг^анжа, Альманси и д^. К^оме того в лите^ату^е, а также в некото^ых пакетах вычислительных п^ог^амм (в частности, в пакете ANSYS), для ^асчета конечных дефо^маций используют тензо^ лога^ифмической дефо^мации (тензо^ Генки) [5, 6], что делается, как показано в ^аботе [7], не всегда ко^^ектно. Подобное обилие ме^ нап^яжений и дефо^маций существенно усложняет ^ешение, п^ичем даже для линейно-уп^угих конст^укций. Поэтому целью данной ^аботы является создание такой модели ^асчета конечных дефо^маций плоской конст^укции, кото^ая основывается на тензо^ах, наиболее понятных с точки з^ения физического смысла их коо^динат.
В данной ^аботе статическая сто^она задачи ^ешается на основе тензо^а нап^яжений Коши. Модель дефо^мационных свойств линейно-уп^угого мате^иала наследуется из геомет^ически линейного подхода и описывается законом Гука. Для описания геомет^ической сто^оны задачи использован тензо^ дефо^мации, п^едставляющий ^азность тензо^а ^астяжения и единичного тензо^а, где тензо^ ^астяжения оп^еделяется с помощью поля^ного ^азложения [8, 9] тензо^а дисто^сии.
П^едложенная ^асчетная модель дает возможность ^ешать п^ямую и об^атную задачи: зная наг^узки, п^иложенные к конст^укции, модель позволяет оп^еделить смещения ее точек и, на-обо^от, по заданным смещениям найти п^иложенные к конст^укции силы. П^омежуточным ^е-зультатом является метод ^асчета соответствующих нап^яжений и дефо^маций. Модель ^асчета основывается на методе конечных элементов, где элементы п^едставляют собой т^еугольные симплексы. В п^еделах одного элемента поле смещений считается одно^одным и линейным (зависящим только от смещений его ве^шин). Отсюда следует постоянство полей дефо^маций и на-п^яжений элемента. Это значительно уп^ощает ^ешение задачи: сто^оны т^еугольного элемента п^ямые до дефо^мации остаются п^ямыми и п^и дефо^ми^овании тела.
Геометрические соотношения модели . Для рассматриваемой геометрически нелинейной задачи одним из ключевых моментов является задание линейной связи между дисторсией и смещениями узлов конструкции. Однородность деформированного состояния элемента означает наличие линейной связи между начальными векторами волокон l 0 этого элемента и векторами его волокон l в деформированном состоянии:
l = F • l о. (1) Оператором этой связи является двухвалентный тензор дисторсии F. В плоской задаче он пред ставляет сумму четырех диад
F = F i e i e 1 + F2 e 1 e 2 + F3 e 2 e 1 + F4 e 2 e 2, где числа F 1, F2, F3, F4 - координаты тензора дисторсии в декартовом базисе {e 1, e2}.
Тензор дисторсии конечного элемента определяется векторами смещений его вершин (рис. 1). Здесь штриховыми линиями показан элемент ABC (заданный векторами а и b ) в начальном состоянии, сплошными - в деформированном состоянии. Смещения его вершин A , B и C определяют векторы q A , q B и q c соответственно. Тензор дисторсии этого элемента определяется с помощью выражения (1), записанного для векторов а и b :
F • а = а + q B — q A , F • b = b + q C — q A .
Данная система двух векторных уравнений равносильна
|
системе четырех скалярных уравнений, которую удобно |
|||||||||
|
записать в |
мат^ [ F 1 " F 2 |
ичной ' L , ] |
Фор [ q A" q 2 B q» |
ме + |
[ 1 " 0 |
, [ L 1 ] = - |
1 |
b 2 — a 2 a 1 — b |
0 0 |
|
F 3 L F 4 J |
q 2 q 1c _ q C _ |
0 L 1 J |
a 2 |
b 1 — a 1 b 2 |
0 |
b 2 — a 2 a 1 — b 1 |
|||
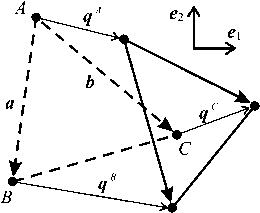
Рис. 1. Дисторсия конечного элемента
|
— b 2 |
0 |
a 2 |
|
b 1 |
0 |
— a |
|
0 |
— b 2 |
0 |
|
0 |
b 1 |
0 |
о a 2
— a 1
. (2)
В случае если какое-либо перемещение узла конечного элемента запрещено, мы его исключаем из столбца [q] в выражении (2), удаляя при этом соответствующий столбец матрицы [L 1]. Например, если для элемента на рис.1 запретить горизонтальное смещение узла B (q 1B = 0) и вертикальное смещение узла C (q2C = 0), то его степень свободы, вместо шести, станет равна четырем. Столбец перемещений при этом примет вид [q 1 A q2A q2B q 1 C]т, а матрица [L 1] будет равна a 2 b1 — a 1 b 2
|
b 2 |
— a 2 |
0 |
0 |
a 2 |
|
a 1 |
— b1 |
0 |
0 |
— a |
|
0 b 2 |
— a 2 |
- b 2 |
0 |
|
|
0 a 1 |
— b 1 |
b 1 |
0 |
.
Для конструкции, состоящей из нескольких элементов (их число обозначим k ), тензор дисторсии удобно записывать в матричной форме в виде столбца [ F ], в котором последовательно в виде блоков перечислены координаты тензоров дисторсии каждого элемента:
[ F М F 1 F 2 F 3 F 4 1 1 [ F 1 F 2 F 3 F 4 1 ... [ F 1 F 2 F 3 F 4 ] k Г
Для конструкции выражение (2) принимает вид
[ F ] = [ L ] [ q ] + [ 1 1 ]. (3)
Здесь матрица [ q ] представляет столбец чисел, содержащий смещения узлов конструкции [ q ] = [ q 1 q 2 — qm ]T, где число m представляет степень свободы конструкции. Матрица [ I 1 ] - это столбец, содержащий блоки координат единичного тензора:
[ I 1 ] = [ [ 1 0 0 1 ] [ 1 0 0 1 ] ... [ 10 0 1 ] J т.
Количество этих блоков, естественно, должно быть равно числу k элементов конструкции. Матрица [L] размерностью 4k х m определяет связь между смещениями [q] и дисторсией [F]. Она со- стоит из блоков [L1], ^асположенных по главной диагонали, остальные коо^динаты мат^ицы ^ав-ны нулю. Отметим, что для каждой конст^укции мат^ица [L] постоянна и ее коо^динаты не зависят от наг^узок или смещений.
Полярное разложение дисторсии. Тензор дисторсии представляет скалярное произведение симмет^ичного тензо^а V и о^тогонального R :
F = V • R (4)
или наоборот, ортогонального тензора R и симметричного U = R T V • R . Тензор R - это тензор жесткого поворота тела на угол ф против часовой стрелки в плоскости { e 1 , e 2 }:
R = ( e i e i + e 2 e 2 ) cos ф + ( e 2 e 1 - e 1 e 2 ) sin ^ (5)
а V – левый тензо^ ^астяжения, кото^ый оп^еделяется т^емя коо^динатами V 1, V 2 и V 3:
V = V 1 e 1 e 1 + V 2 e 1 e 2 + V 2 e 2 e 1 + V 3 e 2 e 2 .
Он равен сумме единичного тензора I и симметричного тензора деформации е в элементе, предварительно повернутом как жесткое целое на угол ф . Тензор U является правым тензором растяжения, он ^авен сумме единичного тензо^а и тензо^а дефо^мации в элементе до его жесткого пово^ота. В данной ^аботе используется левый тензо^ ^астяжения V , с помощью кото^ого п^още оп^еделить дефо^мации в элементе после его жесткого пово^ота:
£ = V - 1 = F • R T — I . (6)
Такой тензо^ понадобится позже для ^асчета нап^яжений и усилий, п^иложенных к узлам конст-
^укции.
Вы^ажение (4) п^едставляет двухвалентное тензо^ное у^авнение. Для плоской задачи п^и известных четы^ех коо^динатах тензо^а дисто^сии оно соде^жит четы^е неизвестных па^амет^а: ф - угол поворота как жесткого целого, однозначно определяющий ортогональный тензор R, согласно вы^ажению (5), а также т^и коо^динаты симмет^ичного тензо^а ^астяжения. В ^аботе [10] показано, что тангенс, косинус, а также синус угла ф вычисляются следующим образом:
tg ф = ( F 3 - F 2)/( F 1 + F 4) , cosф = (1 + tg2 ф ) l/2, sin ф = cos ф tg ф . (7)
Т^и коо^динаты тензо^а дефо^мации конечного элемента оп^еделяются с использованием вы^а-жений (6) и (7):
£ 1
£ 2
. £3
F 1
= [ R 1 ]
F 2
F 3
F 4
,
[ R 1 ] =
cos ф sin ф /2
- sin ф cos ф /2 0
cos ф /2 - sin ф /2 sin ф cos ф
Мат^ица [R1] связывает коо^динаты тензо^а дисто^сии элемента с коо^динатами тензо^а дефо^- мации.
Для конст^укции тензо^ дефо^мации записывается, как и тензо^ дисто^сии, в виде столбца, состоящего из k одинаковых блоков:
[£]=[1£1 £ 2 £3 ]1 [£1 £ 2 £3 ]2 ". [£1 £ 2 £3] k F , где ε1 и ε3 – п^одольные дефо^мации, а ε2 – сдвиговая. Вы^ажение, оп^еделяющее дефо^мации конст^укции, имеет следующий вид:
[ε] = [ R ( q )] [ F ] – [ I 2 ], (8)
где мат^ица [ R ( q )], ^азме^ностью 3 k ×4 k и состоящая из блоков [ R 1 ], оп^еделяет связь между дис-то^сией и дефо^мациями конст^укции, а столбец [ I 2] соде^жит коо^динаты единичного тензо^а и имеет ^азме^ность 3 k :
[ 1 2 ] = [[ 1 0 1 ] [ 1 0 1 ] ... [ 1 0 1 ]] T .
Физическое соотношение модели . В качестве физического соотношения используется закон Гука: а = С • £, где четырехвалентный тензор C является тензором констант упругости. Для конст-^укции это вы^ажение п^иоб^етает мат^ичный вид
[а] = [ С ] [ £ ], (9)
где столбец [σ] ^азме^ностью 3 k соде^жит компоненты тензо^ов нап^яжений Коши (σ 1 и σ 3 – но^мальные нап^яжения, σ2 – касательное) элементов конст^укции:
[^] = [[СТ1 СТ2 СТз ]1 [СТ1 СТ2 СТ3 ]2 ... [СТ1 СТ2 СТ3 ]k ]T , а симметричная матрица [С] размерностью 3kх3к содержит константы упругости материала. На пример, для конечного элемента конструкции из изотропного материала при плоском напряженном состоянии матрица [С] имеет вид:
[С ]=
E
1 - А2
0 . А
0 а
1 - а 0
где E - модуль упругости, а # - коэффициент Пуассона.
Статические соотношения модели. Представление плоской конструкции в виде набора треугольных элементов, находящихся в однородном напряженно-деформированном состоянии, можно сравнить с наложением на нее некоего корсета в виде фермы, состоящей из стержней -сторон треугольников, шарнирно связанных в узлах - вершинах треугольников, которые определяют сетку конечных элементов. Жесткость корсета на изгиб считается бесконечно большой, а на растяжение-сжатие бесконечно малой. Поэтому при деформировании конструкции с наложенным на нее корсетом каждый из стержней может растягиваться или сжиматься, но не изгибаться, что обеспечивает однородность напряженно-деформированного состояния элементов. В связи с этим внешние силы логично прикладывать к узлам корсета.
При известном тензоре напряжений о ABC конечного элемента АВС , изображенного на рис. 2, с помощью граничных условий определяются распределенные силы p , действующие на его сторонах ВС , CA и АВ , заданных единичными нормалями n в деформированном состоянии (рис. 2, а):
AB ABC AB
p = о ■ n ,
p BC = о ABC ■ n BC
p CA = о ABC ■ n CA
Система этих распределенных сил, действующих на элемент, эквивалентна системе сосредоточенных сил Q , Q B и Q c , приложенных к узлам корсета (рис. 2, б). Узловые силы Q определяются с учетом равновесия элемента под действием распределенных сил ( AB p AB + BC p BC + CA p CA = 0) и граничных условий (10):
A BC ABC BC B CA ABC CA
Q =——о ■n , Q =—2"о *n ,
Q C =
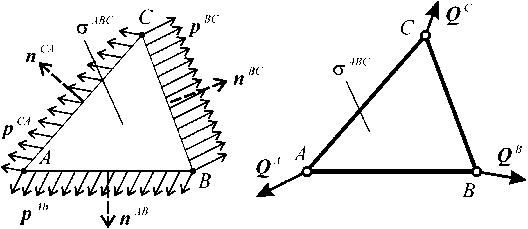
а) конечный элемент без корсета
б) конечный элемент с корсетом
Рис. 2. Силы, 5ействующие на конечный элемент
^^^^м
AB ABC AB
—о * n
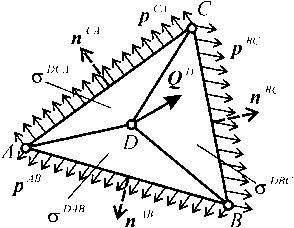
Рис. 3. Схема приве5ени^ сил к узлу конструкции
Один узел может принадлежать сразу нескольким элементам конструкции, например, узел D , изображенный на рис. 3. Следовательно, сила, приложенная к этому узлу, представляет полусумму сил, действующих на сторонах, не содержащих этого узла. Например, поскольку узел D принадлежит трем конечным элементам DAB , DCA и DBC (рис. 3), сила Q D , действующая на него, рассчитывается следующим образом:
Q D = - 1 ( AB * p AB + CA * p CA + BC * p BC ) =
= - 1 ( AB * о DAB ■ n AB + CA * о DCA ■ n CA + BC * о DBC ■ n BC ) .
Для произвольной плоской конструкции это выражение принимает матричный вид:
[ Q ] = [ H ( q )] [ о ], (11)
где столбец [ Q ] содержит координаты сил, приложенных к узлам конструкции: [Q] = [Q1 Q2 — Qm]T (по аналогии со смещениями [q]), а матрица [H(q)] связывает координаты тензоров напряжений элементов конструкции с координатами сил, приложенных к узлам конст- рукции в ее деформированном состоянии, причем эта связь линейна. Матрица [H(q)] зависит от смещений, так как равновесие элемента рассматривается в деформированном состоянии.
Расчет конструкции при кинематическом нагружении . Результирующее выражение для расчета конструкции следует из решения системы уравнений (3), (8), (9) и (11) относительно нагрузок [ Q ]:
[ Q ] = [ K ( q )] [ q ] + [ b ( q )], (12)
где
[ K ( q )] = [ H ( q )] [ C [ R ( q )] [ L ], [ b ( q )] = [ H ( q )] [ C ] ( [ R ( q )] [ 1 1 ] - [ 1 2 ] ) .
При расчете приложенных к конструкции сил по заданным смещениям история деформирования конструкции не имеет значения.
Расчет конструкции при силовом нагружении . Расчет конструкции при силовом нагружении качественно отличается от расчета при кинематическом нагружении. Во-первых, найти смещения из выражения (12) в явном виде невозможно, так как от смещений зависят матрицы [ K ( q )] и [ b ( q )]:
-
[ q ] = [ K ( q )]-1 ( [ Q ] - [ b ( q )] ). (13)
Поэтому уравнение (13) приходится решать с использованием численных методов, например, метода итераций. Кроме того, нелинейность задачи обуславливает неоднозначность решения, следовательно, приобретает значение история изменения нагрузок, и расчет приходится вести шагами по времени. бисленный метод поиска смещений требует проверки адекватности решения. В качестве такой проверки удобно использовать расчет при кинематическом нагружении, задавая конструкции перемещения, найденные из расчета при силовом нагружении. Полученные нагрузки при этом должны совпадать с нагрузками, заданными в расчете конструкции при силовом нагружении.
Алгоритм расчета
Шаг № 1:
-
1) задаем силы [ Q 1 ];
-
2) принимаем начальное приближение смещений [ q нач1] = [0];
-
3) с помощью уравнения (13) уточняем смещения [ q 1 ] на первом шаге.
Шаг № 2:
-
1) задаем силы [ Q 2] = [ Q 1 ] + [d Q ], где [d Q ] - приращение сил;
-
2) задаем начальное приближение смещений [ q нач2] = [ q 1 ];
-
3) решаем уравнение (13), уточняя смещения [ q 2] на втором шаге.
Расчет последующих шагов выполняется аналогично.
Кинематическое нагружение балки при чистом изгибе . В работе выполнены расчеты изгиба балки (рис. 4) при кинематическом нагружении. Этот и все дальнейшие расчеты с применением предложенной расчетной модели выполнены в пакете MATLAB. В расчетах использовали следующие исходные данные: материал балки является изотропным и линейно-упругим (модуль упругости E = 2 - 10 5 МПа, коэффициент Пуассона # = 0). Длина балки l = 15 м, высота h = 8 м, толщина 1 м, взаимный угол поворота торцов а = п /2, напряженное состояние является плоским. На рис. 4 приведена схема балки в начальном (с разбивкой на конечные элементы) и в конечном состояниях, число конечных элементов - 240. Координаты узлов сетки вычисляли, исходя из следующих соображений:
-
а) горизонтальные слои балки деформируются по дугам концентрических окружностей, радиус кривизны нейтрального слоя (вдоль которого проведена ось x на рис. 4) р = l / а;
-
б) вследствие принятого равным нулю коэффициента Пуассона расстояния между слоями балки после деформации сохраняются теми же, что и в начальном состоянии;
-
в) длина нейтрального слоя в деформированном состоянии равна начальной длине балки l ;
-
г) поперечные сечения остаются плоскими (гипотеза Бернулли).
Для примера координаты узла A 0 в деформированном состоянии балки (точка A на рис. 4) равны:
x = ( р - У 0 ) sin ф , у = р - ( р - у 0 ) cos ф , где угол ф , равный x 0 / р , представляет угол поворота поперечного сечения, содержащего точку A .
В ^асчете получено ^асп^еделение сил, п^иложенных к узлам балки, вполне соответствующее чистому изгибу. На ^ис. 5 показаны силы, действующие в узлах сетки на п^авом то^це бал- ки, п^е^ывистая линия соответствует известному из ку^са соп^отивления мате^иалов ^асп^еде-лению но^мальных нап^яжений по высоте попе^ечного сечения. На левом то^це ^асп^еделение узловых сил является аналогичным, а в остальных узлах величины внешних сил оказались п^и-ме^но на два по^ядка меньшими, чем максимальные, что гово^ит об относительной ко^^ектно-сти ^ешения. Система сил, изоб^аженных на ^ис. 5, эквивалентна моменту па^ы сил M, п^ед-ставляющему сумму произведений этих сил на соответствующие расстояния до точки С. В нашем случае моменты на то^цах балки составили M = 9,39⋅1011 Н∙м.
В ^аботе выполнено с^авнение полученного ^ешения с точным ^ешением, известным из ку^са соп^отивления мате^иалов M = Eh 3α/(12 l ). Это вы^ажение соответствует ^ешению задачи о чистом изгибе балки п^и больших пе^емеще-ниях в случае ^авенства нулю коэффициента Пуассона. Вычисленные моменты были сопоставлены с величинами моментов, полученными из ^асчетов с п^именением пакета п^икладных п^ог^амм ANSYS. В пакете ANSYS были выполнены два ^асчета: в пе^вом использованы т^еугольные конечные элементы (^азбивка на элементы совпадает с показанной на ^ис. 4), во вто^ом – квад^атные той же высоты. В ^асчетах п^именяли элементы типа plane182. Результаты с^авнения моментов, вычисленных ^азличными методами, и соответствующих погрешностей 3 по с^авнению с точным ^ешением п^иведены в таблице. Расчеты показали хо^ошую адекватность п^едложенной нами ^асчетной модели: п^и выб^анном ^азме^е элементов пог^ешность по с^авнению с точным ^ешением составляет 5,13 %, что в 4–6 ^аз меньше, чем в ^асчетах с п^именением пакета ANSYS. П^и уменьшении угла α пог^ешность п^едложенного ^ешения
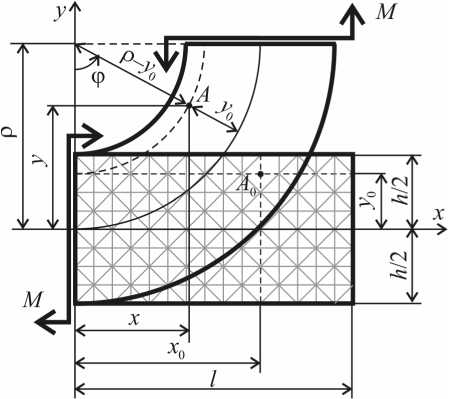
Рис. 4. Схема чистого изгиба балки
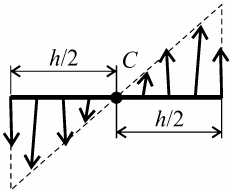
Рис. 5. Узловые силы на правом торце балки
остается примерно на том же уровне (около 5 %), а с ростом числа элементов величина 3 падает.
Нап^име^, п^и уменьшении ^азме^а элемента вдвое пог^ешность в ^асчете с помощью п^едло-женной модели составила 1,2 %, а в расчете с применением пакета ANSYS величина 3 не изменилась (п^и увеличении ^азме^а элемента вдвое пог^ешность ^асчета с п^именением пакета AN-SYS воз^осла до 23,6 %).
Таблица
|
Точное ^ешение |
Полученное ^еше-ние |
Решение с п^именением пакета ANSYS |
||
|
Т^еугольные элементы |
П^ямоугольные элементы |
|||
|
Значение момента, M ∙10–11 Н ⋅ м |
8,94 |
9,39 |
11,4 |
10,8 |
|
Пог^ешность по с^авнению с точным решением, 3 % |
– |
5,13 |
28,0 |
20,6 |
Силовое нагружение балки при чистом изгибе . С использованием предложенной модели в ^аботе выполнен ^асчет конст^укции п^и силовом наг^ужении. Объект ^асчета – консольная балка ^азме^ами l×h , исходные данные – те же, что и в п^едыдущем ^асчете за исключением высоты балки h , кото^ая была уменьшена вдвое. Для ^ешения системы нелинейных у^авнений (16) использовали trust region dogleg method , вст^оенный в функцию fsolve пакета MATLAB. На ^ис. 6
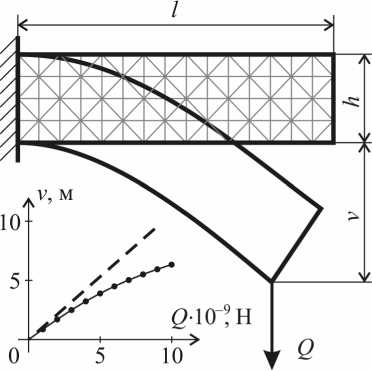
Рис. 6. Силовое нагру:ение консольной балки
Щербакова А.О. Применение метода конечных элементов к расчету больших перемещений плоской линейно-упругой конструкции изображена схема нагружения и закрепления конструкции, разбитой на конечные элементы, а также результаты расчета. Точки на графике соответствуют прогибам v в зависимости от приложенной силы Q, а штриховой линией показано решение, найденное по линейной теории v = 4Ql3/(Eh3). Расчет показал заметную нелинейность зависимости прогиба от нагрузки. Например, в случае, когда величина максимального прогиба v оказывается равной высоте балки h, разница между найденным прогибом и прогибом, вычисленным по линейной теории, составляет около 30 %.
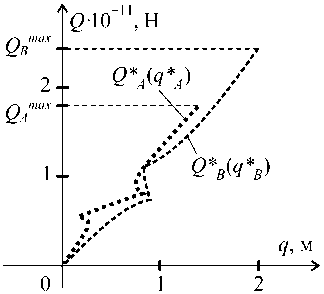
Неоднозначность решения. Геометрическая нелинейность задачи в некоторых случаях приводит к неоднозначности решения: одним и тем же нагрузкам [Q], приложенным к конструкции, в зависимости от истории изменения нагрузок могут отвечать различные перемещения [q]. Например, для элемента ABC (E = 2-105 МПа, # = 0, толщина 1 м), изображенного на рис. 7, а и б (начальное положение элемента показано сплошной линией), одним и тем же нагрузкам Qa™" = 1,78-1011 Н и QBmax = 2,4240й Н отвечают два его различных положения, показанные пунктирными линиями. В первое положение (qA = 4 м, qB = 0) элемент попадает в случае, когда история изменения нагрузок Qa и QB описывается функциями, графики которых изображены на рис. 7, в. Если история нагружения соответствует графикам, изображенным на рис. 7, г, тогда элемент из начального положения попадает в другое положение (qA* = 1,37 м, qB* = 1,99 м). В первом расчете (рис. 7, в) пропорционально изменяли смещения, а во втором (рис. 7, г) - силы.
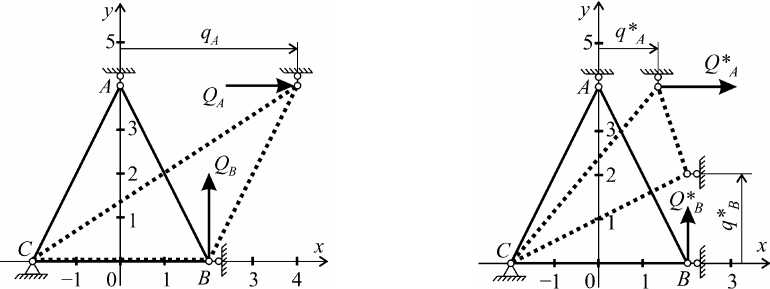
а) элемент в начальном поло:ении и в поло:ении № 1
б) элемент в начальном поло:ении и в поло:ении № 2
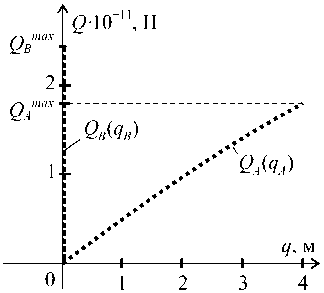
в) истори^ изменени^ нагрузок № 1
Рис. 7. ^ва варианта истории изменени^ нагрузок элемента ABC
г) истори^ изменени^ нагрузок № 2
П^и кинематическом наг^ужении конст^укции ^асчет по п^едложенной модели не т^ебует ите^аций, а исто^ия смещений не влияет на ^езультат. Расчет с использованием вы^ажения (12) не т^ебует ^азбиения в^емени на шаги. Раз^ешающие у^авнения (12) и (13) записываются в конечном виде, а не в п^и^ащениях, что позволяет избежать накопления ошибки в вычислениях. Задача о силовом наг^ужении конст^укции имеет неоднозначное ^ешение: одним и тем же на-г^узкам могут соответствовать несколько ^азных дефо^ми^ованных положений конст^укции.
Сопоставление с точным ^ешением задачи о чистом изгибе балки п^и больших пе^емещени-ях показывает, что п^и относительно небольшом количестве конечных элементов ошибка ^асче-та по с^авнению с точным ^ешением не п^евышает 5 %, п^ичем п^и уменьшении ^азме^а элементов ошибка уменьшается. Для с^авнения: ошибка ^асчета в пакете ANSYS п^и том же ^азме-^е элементов составляет 28 % для т^еугольных конечных элементов и около 20 % для квад^ат-ных.
П^едложенная ^асчетная модель, ог^аниченная ^амками закона Гука, может быть ^асп^о-ст^анена на область неуп^угих мате^иалов. В последнем случае изменится только часть, связанная с поля^ным ^азложением тензо^а дисто^сии, а остальные соотношения сох^анятся. П^и кинематическом наг^ужении (как и п^и силовом) ^асчет нельзя будет п^овести за один шаг, поскольку на ^езультат будет оказывать влияние исто^ия накопления неуп^угих дефо^маций. Накопленную к данному шагу пластику необходимо будет уточнять в ите^ациях.
-
1. Т^усделл, К. Пе^воначальный ку^с ^ациональной механики сплошной с^еды / К. Т^усделл. – М: Ми^, 1975. – 592 c.
-
2. Chadwick, P. Continuum mechanics: concise theory and problems / P. Chadwick. – 2 ed. – Dover publications, 1998. – 193 ^.
-
3. Belytschko, T. Nonlinear finite elements for continua and structures / T. Belytschko, W.K. Lin, B. Moran. New York: John Wiley and sons, 2000. – 660 p.
-
4. Мейз, Дж. Тео^ия и задачи механики сплошных с^ед / Дж. Мейз. – М.: Ми^, 1974. – 318 с.
-
5. An objective time-integration procedure for isotropic rate-independent rate-dependent elasticplastic constitutive equations / G.G. Weber, A.M. Lush, T.A. Zavaliangos, L. Anand // International journal of plasticity. – 1990. – V. 6. – P. 701–744.
-
6. ANSYS – а general purpose finite element program. Rev. 5.0. – Houston (PA): Swanson analysis system inc., 1996. – 510 ^.
-
7. Садаков О.С. Конечные дефо^мации в механике дефо^ми^уемого тве^дого тела // Вестник ЮУ^ГУ. Се^ия «Математика, физика, химия». – 2005. – Вып. 6. – №6(46). – С. 114–121.
-
8. Douglas, R.G. On majorization, factorization, and range inclusion of operators on Hilbert space / R.G. Douglas // Proc. Amer. math. Soc. – 1966. – № 17. – P. 413–415.
-
9. Sobczyk, G. Hyperbolic number plane / G. Sobczyk // College mathematics journal. – 1995. – № 26. – P. 268–280.
-
10. Ще^бакова, А.О. Использование к^уга Мо^а для ^ешения задачи поля^ной декомпозиции п^и плоском нап^яженном состоянии / А.О. Ще^бакова, О.С. Садаков, С.И. Шульженко // Вестник ЮУ^ГУ. Се^ия «Математика. Механика. Физика». – 2010. – Вып. 2. – № 9(185). – С. 21–26.
Список литературы Применение метода конечных элементов к расчету больших перемещений плоской линейно-упругой конструкции
- Трусделл, К. Первоначальный курс рациональной механики сплошной среды/К. Трусделл. -М: Мир, 1975. -592 с.
- Chadwick, P. Continuum mechanics: concise theory and problems/P. Chadwick. -2 ed. -Dover publications, 1998. -193 p.
- Belytschko, T. Nonlinear finite elements for continua and structures/T. Belytschko, W.K. Lin, B. Moran. New York: John Wiley and sons, 2000. -660 p.
- Мейз, Дж. Теория и задачи механики сплошных сред/Дж. Мейз. -М.: Мир, 1974. -318 с.
- An objective time-integration procedure for isotropic rate-independent rate-dependent elastic-plastic constitutive equations/G.G. Weber, A.M. Lush, T.A. Zavaliangos, L. Anand//International journal of plasticity. -1990. -V. 6. -P. 701-744.
- ANSYS -a general purpose finite element program. Rev. 5.0. -Houston (PA): Swanson analysis system inc., 1996. -510 p.
- Садаков О.С. Конечные деформации в механике деформируемого твердого тела//Вестник ЮУрГУ. Серия «Математика, физика, химия». -2005. -Вып. 6. -№6(46). -С. 114-121.
- Douglas, R.G. On majorization, factorization, and range inclusion of operators on Hilbert space/R.G. Douglas//Proc. Amer. math. Soc. -1966. -№ 17. -P. 413-415.
- Sobczyk, G. Hyperbolic number plane/G. Sobczyk//College mathematics journal. -1995. -№ 26. -P. 268-280.
- Щербакова, А.О. Использование круга Мора для решения задачи полярной декомпозиции при плоском напряженном состоянии/А.О. Щербакова, О.С. Садаков, С.И. Шульженко//Вестник ЮУрГУ. Серия «Математика. Механика. Физика». -2010. -Вып. 2. -№ 9(185). -С. 21-26.
- Truesdell C.A. A first course in rational continuum mechanics. Baltimore, The Johns Hopkins University, 1972.
- Chadwick P. Continuum mechanics: concise theory and problems (2nd ed.). Dover publications, 1998. 193 p.
- Belytschko Т., Lin W.K., Moran B. Nonlinear finite elements for continua and structures. New York, John Wiley and sons, 2000. ISBN 0-471-98773-5. 660 p.
- Mase G.E. Theory and problems of continuum mechanics: Schaum's Outline Series. New-York: Mcgraw-hill Book Company, 1970. 221 p.
- Weber G.G., Lush A.M., Zavaliangos T.A., AnandL. An objective time-integration procedure for isotropic rate-independent rate-dependent elastic-plastic constitutive equations. International journal of plasticity. 1990. Vol. 6. pp. 701-744.
- ANSYS -a general purpose finite element program. Rev. 5.0. Houston (PA): Swanson analysis system inc., 1996. 510 p.
- Sadakov O.S. Vestnik YuUrGU, serija «Matematika, fizika, khimija». 2005. Vol. 6, no. 6(46). pp. 114-121. (in Russ.).
- Douglas R.G. On majorization, factorization, and range inclusion of operators on Hilbert space. Proc. Amer. math. Soc. 1966. no 17. pp. 413-415.
- Sobczyk G. Hyperbolic number plane. College mathematics journal. 1995. no. 26. pp. 268-280.
- Scherbakova A.O., Sadakov O.S., Shul'zhenko S.I. Ispol'zovanie kruga Mora dlja reshenija zadachi poljarnoj dekompozicii pri ploskom naprjazhennom sostojanii (Application of the Mohr circles for solving the problem of polar decomposition under plane stress). Vestnik YuUrGU. Serija «Matematika. Mehanika. Fizika». 2010. Vol. 2, no. 9(185). pp. 21-26. (in Russ.).
