Применения Z-преобразования на датчике температуры

Автор: Ахмедова И.Н., Баймуратов С.И.
Журнал: Экономика и социум @ekonomika-socium
Рубрика: Современные науки и образование
Статья в выпуске: 6-1 (97), 2022 года.
Бесплатный доступ
Рассмотрен переход из области непрерывных сигналов в z-область. Построена дискретная по времени система управления датчика температуры с использованием приложения MATLAB Simulink. Показана целесообразность применения z-преобразования (преобразования Лорена) при проектировании дискретных систем управлении в автоматизации технологических процессов и производств для передачи информационных сигналов.
Z-преобразование, метод лорена, преобразование лапласа, модель, передаточная функция
Короткий адрес: https://sciup.org/140298861
IDR: 140298861 | УДК: 681.586
Z-transform applications on the temperature sensor
The transition from the region of continuous signals to the z-region is considered. A time-discrete control system for a temperature sensor was built using the MATLAB application. The expediency of using the z-transform (Loren's method) in the design of discrete control systems in the automation of technological processes and industries for the transmission of information signals is shown.
Текст научной статьи Применения Z-преобразования на датчике температуры
Автоматическое управление предприятий во многих параметрах имеет место в требовании обеспечить желаемого качество передачи информации, то есть передачи дискретных сигналов z-преобразование. Наряду с другими законами автоматического регулирования оставляет существенный след в теории сигналов, так как, в настоящем времени множество предприятий основываются всего лишь на нескольких методах в самом преобразовании. Актуальность закона z-преобразования в том, что он существенно помогает выбрать определённую сигнала, рассчитать эту полезность, а также определение квантования по времени задержки и по уровню, вычисление отсчетов.
Целью данной работы является изучение области применения z-преобразования на предприятиях. Масштабность работы в том, что имея в виду, использующиеся огромное количество разных датчиков и измерительных приборов в автоматизацию промышленных предприятий требуют получить из аналоговых данных оцифрованные дискретные сигналы для автоматического регулирования датчиков температуры с применением z-преобразование. Модель датчика температуры с применением z-преобразования рассмотрен с рассчитанными коэффициентами.
При разработке системы автоматического регулирования важно учитывать внешние воздействия, характеризующие стабильность работы системы для характерного понимания, обычно используют дискретную модель сигналов, а для получения нужных значений устойчивости применяют z-преобразование, нужно понимать, что под этим методом понимается соотношение входов и выходов, то есть, если на входе вводится данные аналогового вида, а на выходе получают преобразованные дискретные сигналы.
Метод имеет несколько критериев применения, во-первых, система должна быть в замкнутом контуре, во-вторых, система не должна зависеть от двух переменных. В методе z-преобразование всегда должны присутствовать коэффициенты усиления.
Применение данного метода рассмотрена к задаче X(t)=t*exp(-at), где присутствует z-изображение функции. Используя теорему об умножении на экспоненту, применительно можно записать функцию следующим образом:
Z = { t • exp ( - at ) } =
Toz • eat _ Toz • e at ( z • e at - 1 ) 2 = ( z • e at ) 2
Передаточная функция (1) представляет разомкнутую дискретную систему по аналогии с непрерывными системами. Введем в рассмотрение передаточную функцию дискретной системы W(z), как отношение Z-изображений выходного и входного сигналов при нулевых начальных условиях:
вых z
Хвх (z)
В разомкнутой дискретной САУ (рис.1) сигналы X(t) и XВЫХ(t) непрерывные функции времени, и формула определяет связь не между ними, а соответствующими решетчатыми функциями [ nT0 ] и Хвых [ nT0 ].

Рис.1. Определение дискретной передаточной функции
Моделирование датчика температуры с z-преобразованием
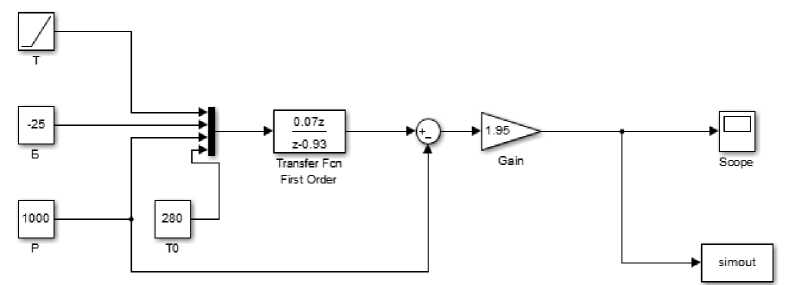
Данная работа выполнена в MATLAB Simulink. Изначально некоторые данные заданы в Блоке constant:
-
❖ сопротивление терморезистора (Р),
-
❖ температурный коэффициент сопротивления (Б),
-
❖ начальная температура по шкале Кельвина (Т0).
С помощью блока ramp задан необходимый диапазон изменения температура. Параметром Slope определена крутизна характеристики, которая обеспечивает изменение напряжения в необходимом диапазоне.
Исходные данные объединены блоком mux , которые поступают на блок Fcn , где задана передаточная функция F(z)=(0,07*z)/(z-0.93) изменения напряжения от температуры. В данном блоке получено преобразование сигнала, который после поступает к блоку gain , с помощью которого задается диапазон изменения выходного напряжения в пределах 0÷5В. Модель датчика температуры приведена на рисунке 2.
ToWoikspece
Рис.2. Модель датчика температуры
Переходные характеристики датчика температуры показаны в графике (Рис.3). По выведенным на график характеристикам видно, как данное преобразование оказывает полезность и точность корректировки сигналов на входе датчика.
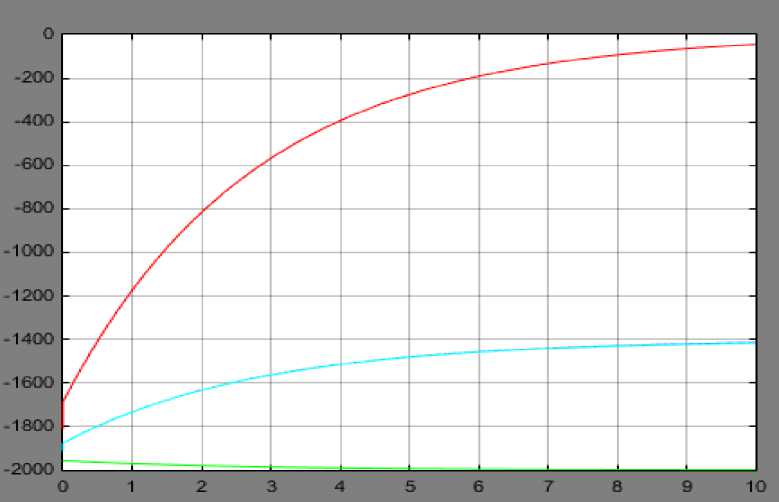
Рис.3. Полученные графики после z-преобразования
В заключение можно указать то, что алгоритм работы модели аналогичен алгоритму работы реального программного обеспечения датчика; полученная модель позволяет наиболее полно оценить влияние частоты квантования по времени задержки и по уровню на динамические характеристики системы. И так можно сделать вывод, что внедрение z-преобразования оправдывает все возложенные ожидания.
Список литературы Применения Z-преобразования на датчике температуры
- Гусев Н. В., Кауцман В. В. Применение z-преобразования для построения и исследования САУ электропривода. [Электронный ресурс]// Журнал ИрГУПС. "Современные технологии. Системный анализ. Моделирование" № 3 (39) 2013. С.165-171. (дата обращения: 04.06.2022) URL: https://cyberleninka.ru/article/n/primenenie-z-preobrazovaniya-dlya-postroeniya-i-issledovaniya-sau-elektroprivoda/viewer.
- Дёч Г. Руководство к практическому применению преобразования Лапласа и Z-преобразования. М.: Наука, 1971. 288 с.
