Принцип минимакса в теории и практике оптимального проектирования приводов современных зерноуборочных комбайнов

Автор: Радин Виктор Викторович, Лыков Евгений Васильевич
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Технические науки
Статья в выпуске: 1-2 (62) т.12, 2012 года.
Бесплатный доступ
Поставлена и решена задача оптимального выбора конструктивных параметров элементов приводов зерноуборочных комбайнов, когда эти элементы реализуются с помощью клиноремённых и гидравлических передач. Для этого использован принцип минимакса, реализованный с помощью метода оптимального проектирования параметров динамических систем в пространстве состояний под действием переменных нагрузок. Для формирования пространства состояний использована ранее полученная автором теоретическая модель динамической системы привода комбайна с нелинейными неголономными связями первого порядка.
Динамика привода зернокомбайна, нелинейная неголономная связь первого порядка, метод наискорейшего спуска, оптимальное проектирование
Короткий адрес: https://sciup.org/14249758
IDR: 14249758 | УДК: 631.354-530
Minimax principle in theory and practice of modern grain combine actuator optimal design
The problem on the design values optimal choice of the grain combine drive elements, when these elements are implemented through the V-belt and hydraulic transmissions, is set and solved. For this purpose the minimax principle, implemented through the method of the optimal design of the state-space dynamic system parameters under the alternating loads, is used. The author’s previously generated theoretical model of the combine drive dynamic system with the nonlinear nonholonomic first-order constraint is used to form the state space.
Текст научной статьи Принцип минимакса в теории и практике оптимального проектирования приводов современных зерноуборочных комбайнов
Постановка задачи. Рассматривается четырёхмассовая динамическая модель привода зерноуборочного комбайна (рис.) с клиноремёнными и гидравлическими передачами. Приведённые функции передач рд, h = 1,3, представлены в данной модели как нелинейные неголономные связи первого порядка. Уравнения основного движения четырёхмассовой системы построены по методике, представленной в работе [1] и применимой к сколь угодно сложному приводу зерноуборочного комбайна.
Пространство состояний динамической системы, адекватное реальной нагруженности проектируемого привода, описывается реакциями R,(z) неголономных связей. Пусть Ry (z) — век- 7e[0;/V]
тор-функции, заданные и непрерывно дифференцируемые на некотором открытом множестве КсЕп, где Еп — евклидово пространство.
Предположим также, что нам задано выпуклое замкнутое ограниченное множество
QcQ', представляющее собой максимальные динамические нагрузки на элементах кинематических трансляторов проектируемого или модернизируемого комбайна. Уравнения основного движения системы выделенных роторных масс этого комбайна, изображённые на рисунке, запишутся в нормальной форме уравнений Коши следующим образом:
^^Vt-^^V
z(O) = z°
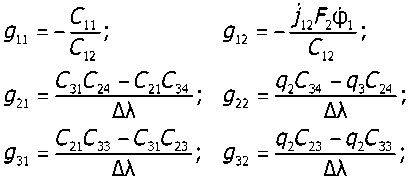
,0 где z(t) = [фт (t) Фг^) Ф3(£) ф4 (t)J — вектор переменных состояния динамической системы (см. рис.); Т — символ транспонирования вектора состояния; Тк — время наблюдения; b — вектор переменных проектирования, например Ь = [/?Л Sh Eh 1^ , h = y + l,n; i = l,n ; л = 4; p = 1; Rh, Sh, Eh — параметры клиноремённых и гидравлических передач приводов проектируемого комбайна, определяющие невосполнимое отставание ведомых элементов от ведущих в h-м контуре; I,— приведённые к соответствующим валам моменты инерции выделенных в динамической схеме масс (см. рис.) относительно их осей вращения; f(t,z(t),b) — вектор правых частей дифференциальных уравнений (1); z° — вектор начальных условий Динамическая модель привода комбайна: ф1Л ф2, ф3, ф4 —угловые скорости соответственно двигателя, ведущих колёс комбайна, главного контрпривода, молотильного барабана; J, — приведённые моменты инерции соответствующих элементов приводов; М, — приведённые обобщённые силы на соответствующих валах; рл — приведённые функции передач как связей Полагаем теперь, что самым энергоёмким рабочим органом зерноуборочного комбайна является молотильный барабан, и обозначаем через ф0 его оптимальную угловую скорость, обеспечивающую наилучшее качество выполнения техпроцесса. Задача минимакса будет состоять в том, чтобы вектор b из пространства переменных проектирования был выбран таким образом, чтобы обеспечить минимум максимальных вариаций: тах|ф4(/-,Ь)-ф0|^т1п, te[0,Tj, (2) где ф4 (t,b) — текущая угловая скорость молотильного барабана Если принять fn(t,b,z) = |ф4-фп| и ipn= maxfn(f,b,z) в момент времени terox], то 1 U у * * / I 1 “ 1 U I 1 U Uy**/ 1 |К _| * задача (2) конкретизируется: minmaxf0(t,b*,z) = minqj0, te[0,T*] Вычисление maxf0(f,b,z) заменяется точной верхней границей ф0 = Д14, которая опреде' ляется соотношением |ф4(Г)-ф0|<д14, fe[0,Tj Тогда задача (2) сформулируется следующим образом Требуется определить minip0 при ограничениях |ф4(Г,Ь)-ф0|<Д14, fe[0,Tj bL / = 1ДЗ, где bL,bv — наименьшее и наибольшее значение переменных вектора проектирования. Для данного проекта в соответствии со схемой (см. рис.) и формулой (1) максимальное число переменных проектирования равно 13. Для решения поставленной задачи (5) с ограничениями (6) и (7) используем методику оптимального проектирования параметров динамических систем в пространстве состояний под действием нестационарных нагрузок [2]. Заменяем ограничение (6) интегральным ограничением вида: 'к Ф= [^f0(t,z,b)-d14^t = 0, где подынтегральная функция определяется соотношением , . . . ff(t,z,b)-b,, если fn (t,z,b)-d14>0 ' ' [О, если f0 (t,z,b)-d14<0 v Если интегральное ограничение (8) в ходе реализации метода наискорейшего спуска не выполняется, вводится в рассмотрение сопряжённая система дифференциальных уравнений: a(t;)=o где A(f) — вектор сопряжённых переменных, равный ммш мо мо л4иТ du -2- — матрица Якоби для вектора правых частей системы дифференциальных уравнений Qz. (1); ^- = [о ° ° sign(ф4 (f) — ф0 (t))^|r, так как f0 = |ф4(t,z,b)-ф0|; е — Е-активные ограничения, вводимые для получения устойчивых коэффициентов чувствительности, которые вычисляются, когда в вектор проектирования включена и точная верхняя граница /?14 ЬГ иг и, а таблица коэффициентов чувствительности будет включать производную ——: ^4 Конкретная система дифференциальных уравнений основного движения (см. рис.) представляется следующим образом: ф, = fY (b,z,t) = [vn(b,z,f) + v12(b,z,t)g12 (b,z,f) + v13(b,z,f)g22 (b,z,f) + +v14(b,z,t)g32 (b,z,t)]/[l - v12(b,z,f)yn (b,z,f) - v13(b,z,f)g12 (b,z,f) --v13(b,z,f)g21 (b,z,f) - g3Y (b,z,f)] Ф2 = gn (b,z,fyY (b,z,t) + gY2 (b,z,t) Фз = g2Y (b,z,ty (b,z,t) + g22 (b,z,f) ф4= g3yb/z^yyb,z,ty g3yb,z,t^ В системе нелинейных дифференциальных уравнений (13) принято: -С С • С 33С 24 / ^ - ^23^34 vn = (J4Y+Qi612 +С21б21+C3Y633yiY, V12 = Ql^ll/A ' V13 = (^"23^23 + Q1^31)/A ' vi4 = (С21б22+c3Y632yiY, ^2 - ЛзA [A +Л4 (1 2e4 ) Л4J фт ^3 _ Л4 {(1 ^4)А[А+Л4(1 2E4)A]+(1 64)АА}Ф1 5ц=А/^12' ^12 = ^2/^12' 521 = 73 C34/ДЛ, б22 = —74С33/ДЛ, б31 = —/3С24/ДЛ, б32 =/4С23/ДЛ, б33 = (М4С23 - М^^ЬК; б23 = (М3СЗА -М4С33)/ДЛ; С8 — элементы матрицы Сразмером 3x4: jlk — расчётные передаточные отношения между осями валов Аго и /с-го элементов модели (см. рис.); £, — функции невосполнимого отставания /с-го элемента модели от Аго. В настоящем исследовании принята линейная зависимость функций г, от нагрузки М, на Ам валу: г, = А^,. Крутящие моменты на валах привода комбайна, входящие в систему (13), определяются выражениями: Л/2 = А2 + FM^ + 52ф2, «з — ^зФз ! МА = А4 + Ад^ + 54ф4, где Fj — составляющие крутящих моментов от сил полезного сопротивления; FM — составляю щие крутящих моментов от сил вредного сопротивления; В, — коэффициенты, определяю- щие составляющие крутящих моментов на валах, пропорциональные квадратам угловых скоростей этих валов. В свою очередь, составляющие крутящих моментов F, распределены в пространстве состояния рассматриваемой системы по фазе воздействия, которую можно оценить величиной чистого (транспортного) запаздывания т, следующими соотношениями: А, = С + К-Д (t - т2); А4 = K4Q(t-T4); q(t^ — подача хлебной массы, С = const. Невыделенные элементы привода в данной модели приведены к валу главного контрпривода. Их число может быть любым. Однако адекватные пространства состояний привода комбайна генерируются восьмимассовой обобщённой динамической моделью [1]. Поэтому невыделенные в схеме элементы привода принимают значения: /=1,4. Коэффициенты К,, / = 2,3,4, определяются соотношением: Q'+Mo' где Y/ — коэффициенты, характеризующие распределение внешних нагрузок по Ам компонентам схемы (см. рис.); q* — расчётное значение подачи хлебной массы, определяемое техзадани ем на проектирование; MiCT — крутящий момент двигателя в точке стыка регуляторной и корректорной ветвей внешней скоростной характеристики; Кф, Ко — моделирующие коэффициенты; qo — начальная средняя величина подачи хлебной массы. Крутящий момент Mi, развиваемый двигателем комбайна, задаётся аппроксимацией внешней скоростной характеристики: 2 о,5£а,ф;т1п, /=0 Ф1 <Ф1тт Ф1тт^Ф1 <Ф1сг Ф1сг ^ Ф1 ^ Ф1тах Ф1 > Ф1тах Mi = /=0 1да(Ф1тт-Ф о, где ф1С7 — угловая скорость двигателя в точке стыка линейной и нелинейной частей внешней скоростной характеристики; а— коэффициенты аппроксимирующего многочлена нелинейной части внешней скоростной характеристики, определяемые методом наименьших квадратов; tg о — коэффициент статизма регулятора угловой скорости двигателя, задаваемый при выборе мощности двигателя в соответствии с техзаданием. Уравнения нелинейных неголономных связей кинематических трансляторов в проекте представлены в следующей форме: ф2=712(1-е2)Ф1 ' Фз - Лз G — ^3 ) Ф1 ’ ■ Ф4 = Л4 (1 -Ез)(1 -Е4)Ф1, Матрица Якоби — вычисляется как производная сложной функции со многими перемен dz ными по следующей схеме: 8С ЭМ, dq 81ХХ 8q 85 8м 8f, . -->—--> — ->--> — ^ > >—.(14 8z dz dz dz dz dz dzdz Далее вычисляем матрицы —. При вычислении этих матриц используется та же последо-8b вательность, что и в схеме (14). В проекте принято: 8М 8М 8М 8М 8г 8b 8Ь 8Ь ' 8Ь 734 4 8Ь ' ^/_ = /V/ ^L + Д ^_— Qb ' Qb ' Qb ' / =2,3,4. b = [^ Ь7 Ь3 ^4 b5 Ь6 Ь6 bs ^w bYY ^12 ^13 ] , ^м° Qb L Qb L Qb L ^ = [0 Qb L о о о о о о о о о о oL о о о о о о о о о о oL о о о о о о о о о о о о of. о о о о о о о о о Выводы. Метод наискорейшего спуска обеспечивает устойчивую сходимость решения по ставленной задачи при использовании диагональной весовой матрицы переменных проектирова ния /,, / = 10,13, следующего типа: ^-^[O 2 0 2 0 2 0 4J. 2. Применение изложенной выше методики к оптимизации конструктивных параметров элементов привода зерноуборочного комбайна позволило установить, что минимальные динамические нагрузки в приводе достигаются при выборе следующих технических параметров: - мощность двигателя комбайна — 250 л. с. - приведённый к валу двигателя момент инерции привода комбайна с измельчителем соломы — I = 15,7 кг-м2. - коэффициент статизма внешней скоростной характеристики двигателя 35,3. - резонансные для основного движения частоты внешних возмущений со стороны подачи хлебной массы находятся в диапазоне 0,85—1,3 Гц.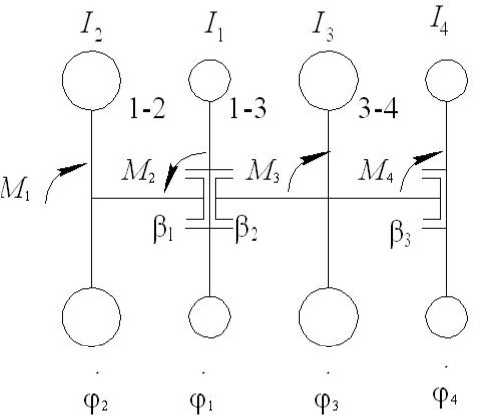

Список литературы Принцип минимакса в теории и практике оптимального проектирования приводов современных зерноуборочных комбайнов
- Радин, В. В. Динамика сложных неголономных систем на примере зерноуборочного комбайна/В. В. Радин, В. А. Бураков. -Ростов-на-Дону: РГАСХМ, 2003. -150 с.
- Хог, А. Прикладное оптимальное проектирование/А. Хог, Я. Арора. -Москва: Мир, 1983. -487 с.
