Приведение возмущенного движения точки на базовую траекторию при наличии геометрических ограничений на дополнительные управления

Автор: Лутманов С.В.
Журнал: Вестник Пермского университета. Математика. Механика. Информатика @vestnik-psu-mmi
Рубрика: Механика
Статья в выпуске: 3 (62), 2023 года.
Бесплатный доступ
В статье решена задача вывода возмущенного движения материальной точки в малую окрестность базовой траектории в предположении, что на дополнительные управления наложены геометрические ограничения в форме выпуклых компактных множеств. В частности, были рассмотрены случаи шаров, эллипсоидов и прямоугольных параллелепипедов. В результате построенного управления были удовлетворены все требования, предъявляемые к кинематике полета точки: запрет попадания точки в заданные области и необходимость ее нахождения в заданной вертикальной полосе над поверхностью земли. Проведенный численный эксперимент подтвердил эффективность предложенного алгоритма.
Кинематический закон движения, базовая траектория, фазовые ограничения, программное управление, малая окрестность
Короткий адрес: https://sciup.org/147246630
IDR: 147246630 | УДК: 517.977.5 | DOI: 10.17072/1993-0550-2023-3-44-54
The perturbed point motion bringing to the base trajectory in the geometric constraints on additional controls presence
The deriving the perturbed material point motion in a small neighborhood of the base trajectory problem is solved in this paper. Assumed that geometric constraints in the form of convex compact sets are imposed on the additional controls. In particular, the cases of spheres, ellipsoids and rectangular parallelepipeds were considered. As a result of the constructed control, all the requirements for the kinematics of the point flight were satisfied: the point hitting prohibition with given regions and the necessity of its location in the given vertical strip above the ground surface. The numerical experiment confirmed the effectiveness of the proposed algorithm.
Текст научной статьи Приведение возмущенного движения точки на базовую траекторию при наличии геометрических ограничений на дополнительные управления
лицензии, посетите
В работе решается задача совмещения, возмущенного и базового движений управляемой точки в заданный момент времени полета. Базовое движение построено автором в статье [1]. Это совмещение осуществляется дополнительным управлением, которое обнуляет возмущения – разность между возмущенным и базовым движениями. Динамика возмущений адекватно описывается линейным векторным дифференциальным уравнением, являющимся линеаризацией в окрестности пары "базовое управление, базовое движение" исходного дифференциального уравнения управляемого движения точки. В дальнейшем дополнительное управление отключается, и точка продолжает свое движение в соответствии с базовым законом движения, что обеспечивает выполнение всех требований, предъявляемых к ее кинематике. Задача решается в предположении, что на дополнительное управление наложены геометрические ограничения. Обычно они возникают, когда выбор оптимального управления, минимизирующего функционал качества, ограничен требованиями, отражающими технические характеристики устройств и условий эксплуатации. Заметим, что наличие ограничений на состояния и управляющие воздействия в виде уравнений или неравенств существенно осложняет решение задачи оптимального управления.
Некоторые подходы построения решения задачи оптимального управления для этого случая представлены в [2–10].
Тот факт, что динамика возмущений описывается линейными дифференциальными уравнениями, позволяет привлечь к решению задачи обнуления возмущений линейную теорию оптимального управления [11–19]. Например, задачи управления с выпуклыми функционалами качества допускают, как известно [15], естественную двойственность с задачами математического программирования. Данное свойство является следствием общего принципа двойственности, установленного Н.Н. Красовским и сформулированного им в терминах проблемы моментов [15].
Использование этого принципа позволило построить эффективные методы решения линейных задач управления на основе сведения задач минимизации в функциональном (бесконечномерном) пространстве к более простым задачам максимизации в конечномерном векторном пространстве, доставляющим оптимум исходным задачам. Этот подход к решению линейных задач управления, который был досконально изучен в работах Н.Н. Красовского, А.Б. Куржанского, Ю.С. Осипова, А.И. Субботина и их учеников, применен автором в представляемой статье.
1. Дифференциальные уравнения движения
Динамика полета описывается обыкно-
венным нением
векторным дифференциальным урав-
r
r
+ g , t g [ 1 0 , T ] ,
где t - текущее время,
r = y g R 3 — радиус-вектор точки относи-
z
тельно начала координат,
m — масса точки,
g R 3 — вектор основных управляю-
щих параметров,
g R 3 — вектор
дополнительных
управляющих параметров,
компонентами векторов v, u являются проекции вектора управляющей силы на соответствующие оси, g — вектор ускорения силы тяжести, k — коэффициент пропорциональности.
В координатной форме векторное уравнение (1) имеет вид k222
X —-- уХ + y + Z X + m
+ — ( V x + U x ) , m
|
k y —--V x 2 + У + z m + - ( v y + u y ) , m |
y + |
t e [ 1 0 , T ] |
|
1---------------------------------------------- k z —-- V x 2 + y + z m + - ( vz + uz ) — g . m |
z + |
Запишем эту систему в нормализованной форме pl — P 4,
P 2 — P5, p3 — P 6, k 222
p 4 —--- V p 4 + p 5 + p 6 ’ p 4 +
m
+_ ( v l + u l ) ,
m k 222
p 5 —--- V p 4 + p 5 + p 6 ’ p 5 +
m
+ — ( V 2 + U 2 ) ,
m k 222
p 6 —--- V p 4 + p 5 + p 6 • p 6 - g +
m
+ _( v3 + u 3),
m где pi — x, p 2 — y, p3 — z, p4 — X, p^ — y, p 6 — z, vl — vx , V2 — vy , V3 — vz ,
.
U — ux , u2 — uy , u3 — uz .
Обозначим через pbaz ( t ) —
' 1 (t Г pbaz 2 ( t ) pbaz 3 ( t ) pbaz 4 ( t ) pbaz 5 ( t ) у pt>az6 (t )j vbaz ( t ) —
' V baz 1 ( t Г v baz 2 ( t )
p
voz
1
(
t
)
p
voz
2
(
t
)
p
voz
3
(
t
)
p
voz
4
(
t
)
p
voz
5
(
t
)
p
voz
6
(
t
)
t
^
[
1
0
,
T
]
соответственно базовый закон движения, возмущенный закон движения, отвечающий начальным условиям pvoz 1 ( t0 ) pvoz 2 ( t0 ) pvoz 3 ( t0 ) pvoz 4 ( t0 ) pvoz 5 ( t0 ) у pvoz 6 ( t0 )J
^
p
10 '
(x
A
x
0
p
20
y
0
p
30
z
0
p
40
x
0
p
50
y
,
У
p
60
J
у
z
0
J
и базовое программное управление в новых переменных. Выведем дифференциальные уравнения управляемого движения, описывающие динамику возмущений:
'
5
p
voz
1
(
t
Г
S
p
voz
2
(
t
)
5
pvoz
3
(
t
)
5
p
voz
4
(
t
)
5
p
voz
5
(
t
)
у
5
p
voz
6
(
t
L
—
5
p
(
t
)
—
p
voz
(
t
)
-
p
baz
(
t
)
.
С этой целью линеаризуем систему (1) в окрестности пары "базовое программное управление, базовое движение" на промежутке времени t e[ t0, T ], где T < t — планируемый момент стыковки возмущенного и базового движения точки. В результате получим систему линейных дифференциальных уравнений:
x
=
A
(
t
)
x
+
Bu
,
t
e
[
t^
,
T
]
,
x
=
x1 x x3 x4
x
5
x
,
u
=
u
1
u
2
u
A
(
t
)
*
6
x
6,
B
^
6
x
3
относительно шести мерного фазового вектора
x
e
R
6
, для которого
=
p
voz
(
t
)
-
pb
az
(
t
)
.
t
e
[
t
0
.
T
1
]
’
Здесь A (t )=
"
O
<
O
E "
p
=
P
baz
, П =
,
O
=
0
0
,
0
2. Корректировка возмущенного движения В предположении, что на вектор управляющих параметров наложено геометрическое ограничение в форме
u
1
u
2
u
e
P
,
^A P • p 4 )••• dp 4 ^(P • p^ )- dp 4
P
•
p6)
бp4(
^(
P
■
p
4
)
d
p
6
^( P ^ p5 )
d
p
6
d
p
6
,
где
P
о
R
3
—
выпуклый компакт, поставим задачу о приведении фазового вектора
x
e
R
6
линейного динамического объекта (2) из положения
5
p
(
t^
)
в момент времени
1
0
в начало координат в момент времени
T
1
.
Задачу приведения будем решать в классе интегрируемых программных управлений
и
(
•
)
, для которых
u
(
t
)
e
P, t
e
[
tQ
,
T
]
. Множество таких программных управлений обозначим символом
П
[
t
0,
T
]
.
Пусть
u
(
-
)
еП
[
t
0,
T
]
. Символом
x
(
t
,
1
0
,
x
0
,
u
(
•
)
)
,
t
e
[
t^
,
T
]
обозначим решение
x
(
t
)
,
t
e
[
t
0,
T
]
дифференциального уравнения (2), для которого
x
(
t
0 )
=
x
0 .
Определение 1.
Множество
G
(
t
»
.
x
,„
T
i
)
=
=
{
q
=
x
(
T
.
1
0
,x
„
,u
(
■
))!
u
(
-
)
еП
[
t
0
,T
]
}
c
R6
называется областью достижимости управляемого динамического объекта в момент времени
T
1
для начального положения
{
t
0,
x
0 }
.
P
= —
k
222
Л/
p
4
+
p
5
+
p
6
,
m
B
= —
m
0
^
.
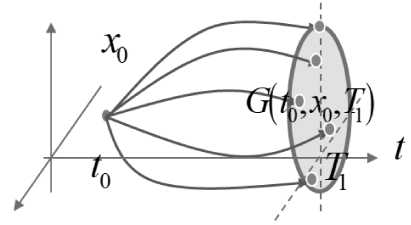
Рис. 1.
Область достижимости
Известно [16], что множество достижимости является выпуклым компактом.
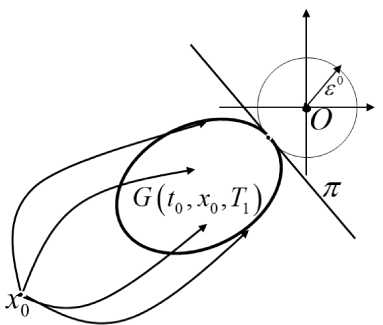
Определение 2
.
Величину
€
0 (
t
0,
x
0)
=
min
{
^ >
0|
G
(
t
0,
x0
)П
м
s
*0
}
,
(см. рис. 2)
где символом
M
€
обозначена замкнутая
€
—
окрестность начала координат, будем называть гипотетическим рассогласованием в позиции
{
t
0,
x
o }
.
Доказательство.
От противного приходим к существованию векторов
l
^)
,
l
(
2
) е
S
(
0,1
)
,
l
(
1
) *
l
(
2
)
, для которых
€ = min qq, l^1) \, qеG(10,x0,T1) V / € = min (q, l(2)k q^ G (t 0,x 0, T1 P '
Рис. 2.
Гипотетическое рассогласование
Сложим эти равенства почленно:
2
€
min
q
е
G
(
t
0
,
x
0
,
T
1
)
В силу компактности множества
G
(
t
0,
x
0,
T
)
минимум в правой части послед-
него равенства существует. Геометрический смысл гипотетического рассогласования состоит в том, что оно совпадает с наименьшим расстоянием, на которое может приблизиться фазовый вектор линейной динамической системы (2) к началу координат в момент вре- мени
T
1
.
Заметим, что если
0
е
G
(
t
0,
x
0,
T
)
, то
€
(
t
0
,
x
o
)
=
0.
Из [20] следует, что
€
(
t
o
,
X
o
)
=
{
max
{
0,
}
,
min
q
е
G
(
1
0
,
x
0
,
T
1
)
< min
qq
,
l
^ +
1
(2Л . (4)
qеG
(
1
0
,
x
0
,
T
1 )\ /
Из неравенства (4) следует, что
l
()
* —
l
( )
, а
из условия
l^ * l
^ )
следует, что
<
2
. Полагаем:
l
(
1
)
+
1
(
2
)
е
S
(
0,1
)
.
Тогда из (3) выводим: = €° .
(q, l)
}
,
max min lеS(0,1) LqeG(10,x0,T1) S(0,1) = {l е R6| |||| = 1}.
Следующие два утверждения являются обоснованием алгоритма построения программного управления
u
(
e
)
(
•
)
е П
[
t
0,
T
]
, реализующего стыковку возмущенного и базового движений.
Теорема 1
.
Пусть
€
(
t
0,
x
0 )
>
0
. Тогда максимум в (3) достигается на единственном векторе
l
0 е
S
(
0,1
)
.
Получили противоречие, которое и доказывает единственность максимизирующего вектора
l
0 е
S
(
0,1
)
. Теорема доказана.
В силу формулы Коши [15], которая в рассматриваемом случая имеет вид q = X [T, 10 ] x +
T
1
JX[Tt]B(т)u(r)dT, t0 где X [t,t] , t, т е [t0, T ] - фундаментальная матрица Коши для однородного уравнения x = A (t) x, формуле для гипотетического рассогласования можно придать вид
£
(
t
0
,
X
»
H
X
[
T'
0
]
x
0
,
l
') +
£
(
t
о
,
x
o
)
=
=
max<0,m
+
hn
X
[
м
Bu
,
ld
■
.
Заметим, что в силу
теоремы 1
максимум в (5) достигается на единственном векторе
l
0 e
S
(
0,1
)
, если
£
° (
t
0,
x
0)
>
0
.
Теорема 2.
Пусть £°
(
t
0,
x
0 )
>
0
, и для программного управления
u
(
e
)
(
•
)
e П
[
t
0,
T
]
имеет место равенство
x
(
T
1
,
t
0
,
x
0
,
u
’(
•
)
)
=
£
(
t
0
,
X
0
)
.
(6)
Тогда необходимо почти всюду на
[
t
0,
T
]
выполняется равенство
( X
[
T
,
t
]
Bu
(
e
)
(
t
)
,
l
°) =
=
min(
X
[
T
,
t
]
Bu
,
l
°),
где
l
0
e
S
(
0,1
)
—
вектор, доставляющий максимум в (5).
Доказательство.
Допустим, что условие (7) нарушается. Тогда существует множество
T
с
[
t
0,
T
]
ненулевой меры, на котором выполняется неравенство
XX
[
T
,
t
]
Bu(e
)
(
t
)
,
l
>
>
min(
X
[
T
,
t
]
Bu
,
1
0>,
t
e
T
Из последнего соотношения вытекает, что
T
1
Д
X
[
T
,
r
]
Bu(e
)
(
r
)
,
l0
^
dT
>
t
0
T
1
>
|
min(
X
[
T
,
t
]
Bu
,
l0^dz.
t
0
.
Подставим вектор
l
0 e
S
(
0,1
)
в правую часть
T
1
.
I
min
XX
[
T
,
t
]
Bu
(
t
)
,
l0 d^ ’
t
0
Обозначим:
x(e
)
(
t
)
=
x
(
t
,
1
0
,
x
0
,
u
(
e
)
(
•
)
)
,
t
e
[
1
0
,
T
]
.
В силу формулы Коши с учетом неравенства (8) выводим: £ (t0,x0)=max[(x()(T),l)!= i i=1
=
max
T
T
1
>X X [T, to ] x0 + J X [T ,t]bu(e)(r) dr, l0 = t0
>
X
r
Тр
[
T
,
t
0
]
x
0
,
l
') +
T
+
J
min(
Bu
,
XТр
[
T
,
t
]
l°*d
T
=
t
0
=
£
(
t
0
,
x
0
)
.
Получили противоречие. Теорема доказана.
Замечание 1. Теорема 2
выражает лишь необходимые условия выполнения равенства (6), поэтому программное управление
u
(
e
)
(
•
)
e П
[
t
0,
T
]
, определенное из условия (7), может и не обеспечить равенство (6). Выполнение этого равенства в процессе вычислений следует проверить непосредственно.
Замечание 2.
Целью введения дополнительного управления служит стремление совместить возмущенное и базовое движение точки в заданный момент времени
T
e
[
t
0,
T
]
.
Это возможно, только если
£
° (
t
0,
x
0 )
=
0
.
Однако в этом случае условия
теоремы 2
не выполняются, и условие (7) не позволяет построить дополнительное управление, осуществляющее стыковку возмущенного и базового движений точки. Итак, пусть
£
° (
t
0,
x
0 )
=
0
. Для произвольного £0
e
[
t
0,
T
]
равенства (5). Имеем: полагаем: u (t) = 0, x (t) = x (t, t0, x0, й (•)), t e [ tо, t) ]. Очевидно, что Отслеживаем величину: £ (t, x (t)), x (t) = x (t, 10, X0, й (•)), t e[t0,t0]. В случае, когда эта величина остается равной нулю вплоть до момента времени tˆ0 , момент времени tˆ0 увеличиваем в рамках промежутка [ t0, T ]. Пусть оказалось, что £° ( T, x ( T )) = 0. Тогда
=
max
J
0, max К
X
[
T
,
T
]
x
(
T
)
■
lli
T
1
■ J
min^
X
[
T
,
r
]
Bu
,
l^d
r
T
u
e
=
max 0,max
(x
(
T
)
,
l}
} =
Последнее равенство означает, что в момент времени T1 произойдет стыковка возмущенного и базового движений точки, осуществляемая управлением u(e) (•) = u (•) . В случае, когда £° (t, x (t)) становится строго положительным до наступления момента вре мени T, момент времени /0 g[t0, T ] выбира- ется из условия 0 < £ (f0, x (Fo ))< а, где а > 0 достаточно малый радиус окрестность точки pbaz ( T ) е R6.
3. Типовые геометрические ограничения на векторы управляющих параметров
В этом разделе будут приведены алгоритмы совмещения, возмущенного и базового законов движения точки при типовых геометрических ограничениях на дополнительные управления. Это случаи, когда множество
Р
с
R3
является шаром, эллипсоидом и прямоугольным параллелепипедом.
Каждый из этих случаев проиллюстрирован численным экспериментом, данные для которого совпадают с аналогичными данными из работы [1] и имеют вид: m = 100 кг, t0 = 0 c, T = 10 c, T = 1 c, k = 0.45 кг, g = 9.8M, мс x * = 2400 м, xT = 3000 м,
=
50
•
sin
(
0.000005
•
x
•
y
)
м
,
G
1
=*
x
V
У
7
y
>
g
i
(
x
)
=
=
0.001
(
x
-
1000
)(
x
-
500
)
м
}
,
G
=\
x
V
У
7
y
<
g
1
(
x
)
=
, = -0.001( x - 2500)(x - 2000) м} f xT 1 yT
V
zT
7
f
3000
м
^
^
(
xT
,
y
T
)
V
0
J
,
.
f
x
01
У
0
V
z
0
7
10
м
-
20
м
рОж
J
f
x
01
■y
0
V
z
0
7
250
м
с
-
60
м с
-
70
м
. В рамках численного эксперимента для каждого вида геометрических ограничений вычисляется величина гипотетического рассогласования £° (t0, x0 ) , строится программное управление, приводящее фазовый вектор линейного объекта в £° (t0, x0) - окрестность начала координат, вычисляется величина промаха по цели. Преобразуем формулу (5), выполнив операцию скалярного произведения под знаком интеграла во втором слагаемом. Имеем:
T
1
+
f min
J u е P t0
2
a
(
T
,
1
)
u
i
d
r
V
i
=
1
7
Здесь а (т,l), т е i = 1,2,3
S
(
0,1
)
,
Приведем результаты численного эксперимента:
– множители, которые собираются при управляющем параметре
Ui
,
i
=
1,2,3
после приведения подобных.
3.1. Случай шаров.
Множество
P
с
R3
является шаром:
'—
0.1585
"
—
0.5512
l
0 =
—
0.7257
—
0.0615
0.2254
4
0.2995
y
Pg
u
1
u
u
е
R
3
। + U + U — r . В численном эксперименте принимается
r
=
18000
м-Кг-с
2
. Из формулы (9) выводим:
£
° (
t
0
,
x
0
)
=
=
max
шестимерный единичный вектор, максимизирующий правую часть в (9); £0 (t0, x0 ) = 0.273 м — величина гипотетического рассогласования; ||x0 (T )|| = 0.2720 м — норма шестимерного фазового вектора линейного объекта в момент времени T1; A = 2.4454 м — промах по цели в конечный момент времени T .
T
1
3
2
- r [JEg (т, l) dT
t
0
i
=
1
Вектор управляющих параметров, на котором достигается минимум под знаком интеграла в (9) вычисляется по формуле
U
0 (
т
,
l
)
= -
r
а
(
т
, i
)
E g (т, l)
i
=
1
а2 (т,l) E ai (т,l)
i
=
1
g
3
(
т
,
l
)
E ai (т,l)
i
=
1
j
Одновременно формула (10) служит шаблоном для построения программного управления, переводящего фазовый вектор линейного объекта в
£
0 (
t
0,
x
0 )
—
окрестность
начала координат.
3.2. Случай эллипсоидов.
Множество
P
с
R
3
является эллипсоидом:
P Ч
u
1
u
2
u
е
R3
В численном эксперименте принимается: м • кг мктам • кг al = 20600 ——-, a2 = 18600 —, с2с2 i^M м • кг a3 = 17600 — с2
.
Из формулы (9) выводим:
£
0 (
t0
,
x
0)
=
max
<
0,max^
X
[
Tx
,
t0
]
x
0,
l^
—
T —L/e g (т, l) adт 4 Вектор управляющих параметров, на котором достигается минимум под знаком интеграла в (9) вычисляется по формуле
а
(
т
,l
)
a2
E а (т, l) al i=1
а
(
т
,
l
)
a
2
E а (т, l) al i=1 . В численном эксперименте принимается м• кг л^л^м• кг a = 17100 —, a2 = 15100 —;-, с2с2
л л л ™
м
■
кг a
3 =
14100 ——
с
2
.
Из формулы (9) выводим:
£
0
(
t
0,
x
0)
=
max
<
0, max
а
(
т
, l
)
a2
E а (т, l) ai i=1 Одновременно формула (11) служит шаблоном для построения программного управления, переводящего фазовый вектор линейного объекта в £0 (t0, x0 )— окрестность начала координат. Приведем результаты численного экспе- римента l0
'-
0.1199 '
-
0.5157
-
0.7577
0.0474 0.2118
ч
0.3138
7
шестимерный единичный вектор, максимизирующий правую часть в (9); £0 (t0, x0 ) = 0.2736 м - величина гипотетического рассогласования; ||x0 (T )|| = 0.2725 м - норма шестимерного фазового вектора линейного объекта в момент времени T1 ;
промах по цели в конечный момент времени
T
.
3.3. Случай прямоугольных параллелепипедов.
Множество
P
с
R
3
является прямоугольным параллелепипедом:
P
= )
u2
е
R
3
|u
| <
a
3, |
u
2| <
a2
, |
u
3| <
a3
*
.
'
-
П E
ki^
7
,
l
)l
a
i
I
d
т
1
0
4
i
=
1
7
Вектор управляющих параметров, на котором достигается минимум под знаком интеграла в (9) вычисляется по формуле и0 (т, l )=-
Одновременно формула (12) служит шаблоном для построения программного управления, переводящего фазовый вектор линейного объекта в
£
0 (
t
0,
x
0 )
-
окрестность начала координат.
Приведем результаты численного эксперимента: £0 (t0, x0) = 0.2646 м - величина гипотетического рассогласования; ||x0 (T )|| = 0.2677 м - норма шестимерного фазового вектора линейного объекта в момент времени T1 ;
промах по цели в конечный момент времени
T
.
Заключение В статье осуществлена стыковка возмущенного и базового законов движения управляемой точки для случая, когда на дополнительное управление налагаются геометрические ограничения в форме шаров, эллипсоидов и прямоугольных параллелепипедов. В результате произведенной стыковки дальнейшее движение точки происходило в малой окрестности базовой траектории, что обеспечивало выполнение всех сформулированных в постановке задачи наведения на цель требований к ее кинематике и точное попадание в цель. Указанный вывод подтверждается численным экспериментом.





' 0.0009 "
-0.0001
l0 =
-0.9209
0.0006
0.0000
ч 0.3899 7
шестимерный единичный вектор, максимизирующий правую часть в (9);
Список литературы Приведение возмущенного движения точки на базовую траекторию при наличии геометрических ограничений на дополнительные управления
- Лутманов С.В. Построение базового закона движения материальной точки и реализующего его программного управления при наличии фазовых ограничений // Вестник Пермского университета. Математика. Механика. Информатика. 2022. Вып. 3(58). С. 25-35.
- Баландин, Д.В. Стабилизация линейных динамических объектов по измеряемому с ошибкой состоянию при ограничениях на фазовые и управляющие переменные / Д.В. Баландин, А.А. Федюков // Известия Российской академии наук. Теория и системы управления. № 5. 2021. С. 5-17.
- Велищанский М.А. Движение летательного аппарата в вертикальной плоскости при наличии ограничений на состояния // Вестник МГТУ им. Н.Э. Баумана. Сер. Естественные науки.2016.№ 3. C. 70-81.
- Горбачева А.В., Карамзин Д.Ю. Уточнение условий оптимальности в задачах управления с фазовыми ограничениями типа равенств и неравенств // Вестник Тамбовского университета. Серия: Естественные и технические науки. 2016. Вып. 1, т. 21. 2016. С. 40-55.
- Горбачева А.В., Карамзин Д.Ю. О некоторых классах задач управления с фазовыми ограничениями // Вестник РУДН. Серия Математика. Информатика. Физика. 2016. № 1. С.11-18.
- Болтянский В.Г. Математические методы оптимального управления. М.: Наука, 1969. 408 с.
- Васильев Ф.П. Численные методы решения экстремальных задач. М.: Наука, 1988. 549 с.
- Евтушенко Ю.Г. Методы решения экстремальных задач и их приложение в системах оптимизации. М.: Наука, 1982. 432 с.
- Кротов В.Ф. Основы теории оптимального управления. М.: Высшая школа, 1990. 429 с.
- Понтрягин Л.С., Болтянский В.Г., Гамкрелидзе Р.В., Мищенко Е.Ф. Математическая теория оптимальных процессов. М.: Наука, 1976. 392 с.
- Благодатских В.И. Введение в оптимальное управление. М.: Высшая школа, 2001. 239 с.
- Благодатских В.И. Линейная теория оптимального управления. М.: Изд-во Моск. унта, 1978.
- Габасов Р.Ф., Кириллова Ф.М. Оптимизация линейных систем. Минск: Изд.-во БГУ, 1973.246 с.
- Габасов Р.Ф., Кириллова Ф.М. Принцип максимума в теории оптимального управления. Минск: Наука и техника, 1974. 272 с.
- Красовский Н.Н. Теория управления движением. М.: Наука, 1968. 476 с.
- Красовский Н.Н. Игровые задачи о встрече движений М.: Наука, 1970. 420 с.
- Красовский Н.Н., Субботин А.И. Позиционные дифференциальные игры. М.: Наука, 1973.456 с.
- КиселёвЮ.Н. Линейная теория быстродействия с возмущениями. М.: Изд-во Моск. ун-та, 1986. 106 с.
- Уонэм М. Линейные многомерные системы управления М.: Наука, 1980. 376 с
- Лутманов С.В. Элементы выпуклого анализа и методы оптимизации: учеб. пособие / Перм. ун-т. Пермь, 2018. На электронном носителе 180 с. ISBN 978-5-7944-3114-8. https://elis.psu.ru/ident/978-5-7944-3114-8.
