Проактивное моделирование динамической сложности агротехноценозов

Автор: Башилов Алексей Михайлович, Королв Владимир Александрович, Арженовский Алексей Григорьевич, Глобин Андрей Николаевич, Глечикова Наталья Александровна
Журнал: Вестник аграрной науки Дона @don-agrarian-science
Рубрика: Технологии, средства механизации и энергетическое оборудование
Статья в выпуске: 3 (51), 2020 года.
Бесплатный доступ
Представлены методы решения задач проактивного моделирования динамической сложности агротехноценозов для эффективного управления внутрисистемными процессами, упреждающими проявление негативных тенденций, рисков и неблагоприятных обстоятельств. Рассмотрены модели проактивного управления: модель формирования сенсорно-преобразовательных функций человека и видеоробота, модель группового управления агророботами, динамическая модель трансформации и перепланирования системной сложности агротехноценозов. Дискретные модульные действия характеризуют и взаимоувязывают непрерывный процесс самоорганизации живых биообъектов и их искусственной технической организации в антропогеоагротехноценозах. Проактивность (устремлённость вперёд, на опережение, упреждение) основана на изучении меняющихся пределов агротехноценоза для достижения поставленных целей, в частности, обоснования и изменения его структуры и др. Проактивное управление в ходе реализации моделирует (наблюдая, измеряя и анализируя) ход технологических процессов, предупреждает о возможных негативных (нештатных) ситуациях,наиболее рационально и эффективно реагирует на них. Метод совместим с реактивным управлением текущими «сиюминутными» событиями в сложных системах. Системную сложность объектов отображают различные методы: формализованного описания (топологические, графоаналитические, логические, теоретико-множественные, лингвистические), вербальные (целеполагание, экспертные оценки, тесты, интуитивный опыт), специального моделирования (имитационное динамическое, структурно-лингвистическое, ситуационное). Анализ выборочно рассмотренных примеров развития исследований и применений компонентов современных технологических платформ показывает направления реализации проактивного управления в аграрном производстве: развитие сенсорно-поисковых и исполнительно-преобразовательных функций роботов, групповое применение манёвренных агророботов и аэроботов, создание единой цифровой платформы управления сложной системой антропогеоагротехноценозов. Прогноз конкурентных преимуществ применения проактивного управления: улучшение условий труда, привлечение молодёжи к новым условиям труда, повышение производительности труда в 2-3 раза, качества производимой продукции, снижение затрат труда и энергоресурсов на её производство на 40-50%. Исследования данной проблемы обладают научной новизной, патентоспособностью и лицензионными возможностями, обеспечивающими высокую технико-экономическую значимость реализуемых технических решений за счёт будущей коммерциализации.
Системометрия, агророботы, групповое взаимодействие, трансформация структуры, целеадаптивное управление, самоорганизующееся агропредприятие
Короткий адрес: https://sciup.org/140251203
IDR: 140251203 | УДК: 338.43
Proactive modeling of the dynamic complexity of agrotechnocenoses
The article summarizes the main approaches to solving the problem of proactive modeling of the dynamic complexity of agrotechnocenoses for the effective management of intra-system processes that anticipate the manifestation of negative trends, risks and adverse circumstances. Proactivity (forward-looking, proactive, and proactive) is based on the study of the changing limits of agrotechnocenosis in order to achieve the goals set, in particular, to justify and change its structure. Proactive management models (by observing, measuring, and analyzing) the expected negative actions, acts by reacting in the best way to these actions, and warns them. The prefix «pro» means striving forward, ahead of schedule, to lead. It is appropriate to combine such a method with the reactive control method for current, «momentary» events. To display systemic complexity, it is advisable to use various methods: formalized descriptions (topological, graph-analytical, logical, set-theoretic, linguistic), verbal (goal setting, expert assessments, tests, intuitive experience), special modeling (imitation dynamic, structural linguistic, situational). From the analysis of selectively examined examples of the development of research and applications of components of modern technolo-gical platforms, it follows that the strategy for implementing proactive management in agriculture should be carried out in three main directions: the development of sensory-search and executive-transformative functions of robots, group application of agricultural robots and aerobots, the foundation of a single digital control platform for a complex system of anthropogeo-agrotechnocenoses. The main models of proactive management are considered in the article: a model model for the formation of sensor-transformative functions of a person and a video robot, a model for group control of agricultural robots, a dynamic model for the transformation and replanning of the systemic complexity of agricultural technocenoses. Such discrete modular actions can characterize and interconnect the continuous process of self-organization of living bioobjects and their artificial technical organization in anthropogeoagrotechnocenoses. Predictive characteristics of the competitive advantages of using proactive management: improving working conditions, attracting young people to new labor conditions, reducing production costs and loss of production, increasing labor productivity by 2-3 times, improving the quality of products, reducing labor costs and energy resources for its production by 40-50%. The results of scientific research in this direction have a scientific visa, a high level of patentability and licensing capabilities, ensuring the socio-economic effect of the usage of products due to future commercialization.
Текст краткого сообщения Проактивное моделирование динамической сложности агротехноценозов
Введение. Научные знания – непрерывное движение мыслей. Чем больший пространственно-временной охват научными знаниями сферы аграрного производства, тем сложней её системная организация. Характерные особенности этой организаций отображают новые тенденции современного уровня развития, такие как: экологизация, информатизация, роботизация [1, 2, 3, 4, 5]. То есть к предшествующему объёму знаний добавляются новые изобретения, системные представления, и модели, их отображающие, расширяются, разрастаются.
За двадцатилетний период в России и других странах накоплен значительный позитивный опыт применения современных агротехнологий [6, 7, 8, 9, 10]. Они позволяют повышать объём и качество сельскохозяйственной продукции, сокращать действие негативных тенденций, снижать производственные затраты.
В растениеводстве такие агротехнологии относятся к экологически безопасным, энергосберегающим и могут широко использоваться в органическом земледелии при производстве экологически чистых продуктов питания, спрос на которые постоянно возрастает [3, 4, 5].
В животноводстве получают все большее признание и распространение системы точного управления. Это новый подход, при котором применяемые технологии оптимизируются по качеству, продуктивности и энергоресурсозатратам для каждого животного. Исследовать каждое животное в объёме многочисленного стада возможно, применяя систему управления роботизированными комплексами на основе технического зрения и навигации. В настоящее время за рубежом системы компьютерного (машинного) зрения активно внедряются в аграрное производство [12]. Что касается отечественных хозяйств, то для них такие системы могут оказаться очень перспективными. Во-первых, они позволяют дистанционно, пристально и непрерывно контролировать поведение животных, не допуская возникновения нега- тивных тенденций, связанных с охраной и обеспечением здоровья животных, возникновением болезней и падежом скота. Во-вторых, система компьютерного зрения является незаменимой при учёте потока материалов и средств на всех технологических стадиях, что, в конечном счёте, определяет себестоимость продукции, снижает затраты труда.
При многообразии факторов, влияющих на продуктивность и экономические показатели хозяйственной деятельности фермы, при динамичности и изменчивости технологических параметров необходима интеграция производства и диспетчеризация управления фермой. То есть повышение информативности и увеличение интеллектуальных возможностей в управлении фермой позволят дополнительно конверсировать информационно-коммуникационный ресурс в материально-технологический эффект роста продуктивности и качества агропродукции.
Из анализа выборочно рассмотренных примеров развития исследований и применений компонентов современных технологических платформ следует, что стратегию и программную реализацию этого направления в сельском хозяйстве следует осуществлять в трёх основных направлениях: развитие сенсорно-поисковых и исполнительно-преобразовательных функций роботов, групповое применение манёвренных агророботов и аэроботов, создание единой цифровой платформы управления сложной системой агротехноценозов.
Методика исследований. Методология проактивного моделирования в настоящее время является профессиональным подходом к оптимизации управления любой организационной структурой. Она опирается на базовые знания научного управления предприятием и ориентирована на достижение конечного результата. В таком системно формируемом подходе поставленная цель и получаемый результат неразделимы. Управляя технологическими процессами, обеспечивая достижение цели произ- водства, необходимо последовательно учитывать достигаемые результаты [8,13,14].
При практической реализации оказывается, что легче ставить цели и задачи, чем управлять, опираясь на них. Такое положение связано с «нетерпеливым» подходом многих руководителей к управлению предприятием, на решение «острых» моментов, направленных на быстрое устранение «слабых мест» в текущей трудовой деятельности. Руководитель, оказывающий первоочередное внимание на решение сиюминутных вопросов, оперативно реализует реактивное управление - метод управления, при котором планирование необходимых агро-технологических действий осуществляется перед самым началом или в процессе их выполнения. Таким образом запланированные действия довольно часто меняются, в значительной мере, по причине отсутствия достаточно ясных целей. Управление сводится к правильной реакции на текущие события, но к неправильной на события, связанные с целью [9].
Метод проактивного управления направлен на предотвращение инцидентов, негативных тенденций и форс-мажорных обстоятельств. Проактивность основывается на постоянном изучении изменяющихся пределов агротехноценоза для эффективного решения поставленных задач, в частности, задач роста и развития. Проактивное управление в ходе реализации моделирует (наблюдая, измеряя и анализируя) ход технологических процессов, предупреждает о возможных негативных (нештатных) ситуациях, наиболее рационально и эффективно реагирует на них. Приставка «про-» означает устремлённость вперёд, на опережение, на упреждение. Такой метод целесообразно совмещать с методом реактивного управления на текущие, «сиюминутные» события. Управление эффективнее тогда, когда руководитель больше опирается на программно-целевой подход проактивного моделирования и сотрудники затрачивают на него более половины своего рабочего времени.
Агротехноценозы - сложная система, познание (изучение) которой требует совместного привлечения разнотипных моделей, многих теорий, многих научных дисциплин (организации междисциплинарных исследований).
Антропогеоагротехноценозы - регионально ограниченное системное взаимодействие между хозяйственным коллективом людей и освоенной им территорией для ведения сельского хозяйства.
Для отображения системной сложности целесообразно использовать различные методы: формализованного описания (топологические, графоаналитические, логические, теоретико-множественные, лингвистические), вербальные (целеполагание, экспертные оценки, тесты, интуитивный опыт), специального моделирования (имитационное динамическое, структурнолингвистическое, ситуационное).
Результаты исследований и их обсуждение.
-
а) Формирование необходимых поисковопреобразовательных способностей видеороботов для эффективного применения в сельском хозяйстве.
Реализация новейших высокоэффективных технологий в растениеводстве и животноводстве предусматривает выполнение многих мониторингово-контролирующих и командноисполнительных операций. Некоторые из этих операций выполняют не в соответствии с заданными технологическими картами, а по необходимости. Когда есть отклонения техникотехнологических характеристик агрообъекта от нормируемых либо критические, нужно действовать более оперативно, с упреждением. Существующие агротехнологии в данных ситуациях используют наземные механизированные средства. Их применение, однако, сопровождается негативными воздействиями на объект аграрного производства и окружающую среду. Эти недостатки можно устранять при использовании манёвренных авиационных средств.
В настоящее время авиационные самолёты применяют в технологиях аграрного производства для видеонаблюдения и охраны территорий, составления электронных карт угодий, распыления химических препаратов. Использование в агропроизводстве летательных миниаппаратов вертолётного типа, снабженных сменными рабочими органами поддержки технологических операций, создаёт дополнительные возможности для локально-выборочных воздействий на агрообъекты при более точном и экономичном маневрировании, обеспечивая избирательное и оперативное выполнение технологических операций [11].
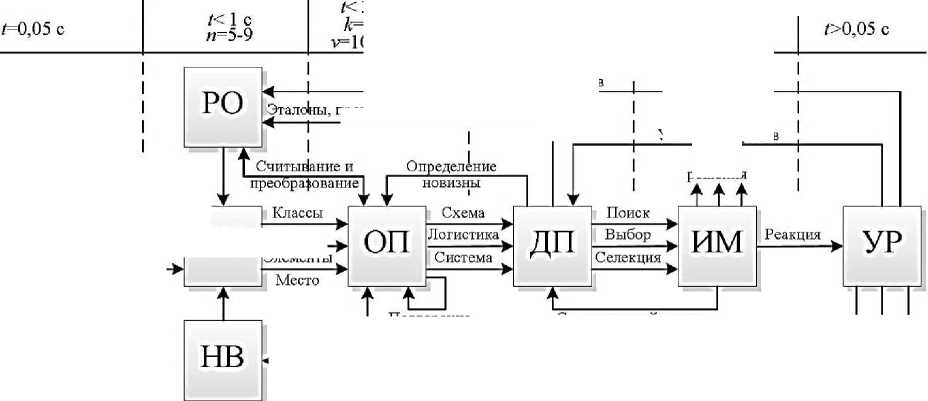
На основе всестороннего и системного анализа новейших технологий растениеводства и животноводства выявлены и классифициро- ваны поисково-преобразовательные функции летательных аппаратов в современных агротехноценозах. Разработаны основные узлы (фотосъёмки, обработки и анализа изображений, принятия исполнительных команд) многофункционального модуля наземного или воздушного агроробота, интегрированного в условия аграрного производства. На рисунке 1 приведена схема модели формирования сенсорнопреобразовательных функций человека и видеоробота в процессе наблюдения и админи- стрирования сложных системно организованных агрообъектов.
Многофункциональные особенности агророботов определяются сенсорной (поисковомониторинговой) видеоцифровой системой распознавания структуры морфологических и этологических информативных характеристик агрообъектов, а также исполнительной (команднопреобразовательной) системой, например: для взятия проб почвы или растений, воздействия лазерным излучением, физического или химического воздействия.

Рпр=90-100%
Распознаваний сложных объектов
/>24 ч.
Руз=90-100%
30 с =5-9
>
Указание адресов
Выход решения
Яркость
Место
Предвосхищение, игнорирование, выделение признаков, структуры, цели
Учет движения объекта, перевод взгляда, моторика
Повторение Струкутурный анализ
Кодирование по наименованию
СВ – сенсорный вход; ВН – видеонаблюдение; ОП – оперативная память; ДП – долговременная память;
ИМ – интеллектуальное мышление; УР – управляющие реакции; РО – распознавание образов;
НВ – направленное внимание; t – время удержания зрительной информации; n – число воспринимаемых информативных признаков; k – число информационных каналов; v – скорость записи в ОП;
Рпр – вероятность припоминания; Руз – вероятность узнавания
Рисунок 1 – Обобщённая блок-схема модели формирования сенсорно-преобразовательных функций человека и видеоробота в процессе наблюдения и администрирования системной сложности агрообъекта
прототипы, грамматика образов
Цвет ВН ' Группы Форма
Элементы
Отмеченные особенности агроробота позволяют осуществлять агротехнологические мероприятия в растениеводстве точечно-выборочно с возможностью реализации технологий предиктивного управления изменениями характеристик ОАП. Аналогично, в животноводстве рационально применять прогрессивные достоинства методов проактивного управления при контроле поведенческих, а также физиологических особенностей животных, а затем использовать эти данные в конкретных реализациях агротехнологий.
Групповое применение манёвренных агророботов и аэрокоптеров. Исследования и проектирование интеллектуальных роботов активно выполняются в большинстве индустриально прогрессивных стран. Созданы принципы формирования базовых информационнотехнологических операций, выполняемых роботами. Достаточно полно проработаны аппаратные и программные реализации типовых модулей, например, для идентификации объектов в зоне функционирования робота, формализации сцен и моделей зоны функционирования робота, изменений окружающей среды, выбора наиболее рациональных траекторий движения и эффективного алгоритма достижения заданных целей и др.
Современные достижения техники позволяют создавать различные робототехнические устройства: универсальные колёсные платформы, летающие и плавающие беспилотные аппараты, миниатюрные роботы, машинно-тракторные агрегаты, транспортные средства. Ро- бот представляет собой подвижное средство, на которое можно установить дополнительное мини-оборудование, грузовые отсеки, манипуляторы, электронное оборудование, видеокамеры, сенсоры.
Применение одиночного робота в реализациях широкомасштабных целей затруднительно. Как правило, спектра выполняемых функций и исполнительных устройств одиночного робота не достаточно для выполнения всех технологических операций. Кроме этого, малый ресурс бортового (в большинстве случаев автономного) источника энергии робота ограничивает размеры зоны его функционирования.
Из зарубежного и отечественного опыта известны апробированные формальные модели коллективного поведения роботов (автоматов, агентов): модели поведения на основе конечных автоматов, многоагентные системы, модели и теория общих намерений, модели общих планов, сценарные модели, биологические, роевые, самоорганизующиеся модели поведения, модели движения.
Наиболее приоритетным направлением, соответствующим современным технико-технологическим возможностям аграрного производства, может стать групповое применение видеороботов. Основное назначение которых: обнаружение интересуемых объектов на агропроиз-водственных площадях, установление пристального наблюдения за обнаруженными объектами, регистрация анатомо-морфологического образа интересуемых объектов, биометрический анализ информативных признаков образа интересуемых объектов, классификация интересуемых объектов по потребительским категориям, управление состоянием и поведением интересуемых объектов, распределение их в группы или удаление из группы и перераспределение.
Особенно остро такая задача стоит на животноводческих фермах для управления стадом животных, а ещё в большем масштабе для управления (диспетчеризации) фермой.
Управление технологиями на животноводческой ферме зачастую определяет способ содержания животных (стойловое, пастбищное, привязное). При этом значимый прирост эффективности реализации технологических процессов на ферме обеспечивают возможности идентификации и обнаружения места нахождения любого животного, целенаправленный ди- намический контроль внешнего вида, статей (частей) и состояния животного, фиксацию полученной видеоинформации в базе данных. Кроме того, эффективность управляющих воздействий существенно зависит от результатов информационно-аналитической обработки ви-деоцифровых данных, правильной оценки реального состояния и активности каждой конкретной особи стада, их групп, а также всего стада.
При привязном содержании животных (условно детерминированная среда) каждый отдельный видеоробот отрабатывает предварительно заданную программу контроля состояния либо обслуживания животных. В случаях беспривязного или пастбищного содержания животных (недетерминированная динамическая среда) первоначально актуальна задача обнаружения интересуемого животного в группе, а затем – наблюдение и обслуживание животного.
Классификация стратегий группового управления видеороботами животноводческих ферм и пастбищ: централизованное (единоличное и иерархическое), децентрализованное (взаимосвязанное коллективное и невзаимосвязанное роевое) и составное (общее и децентрализованное). При привязном содержании животных наиболее рационально использовать централизованное управление, при беспривязном и пастбищном содержании – стратегию составного управления.
В общем виде модель управления группой видеороботов можно формализовать как исполнение индивидуальных целей для различных видеороботов, позволяющих достичь общую цель и отобразить её в виде логиколингвистических связей:
м = {лч,ғ^мкЛцв,зв),(цн,зн)}
где NЦ – конечное множество выбранных целей из совокупности целей; FN – формализованное представление цели лицом, принимающим решение; МК – множество критериев, функций и функционалов, отображающих достижение цели; ЦВ, ЦН – цели вышестоящего и нижестоящего уровня иерархии целей; ЗВ, ЗН – значимость, предпочтение цели на множестве целей, отношение субординации.
Формализация и корректировка алгоритмов управления группой видеороботов, работающих в средах недетерминированного динамического окружения (произвольное поведение животных при беспривязном содержании, не- равномерное освещение, неоднородный фон и т.п.), должны быть осуществлены за период времени, когда состояние структуры «видеороботы - ОАП - окружающая среда» существенно не трансформируется.
-
б) Создание единой цифровой платформы управления антропогеоагротехноценозами.
Агроценоз - основная структура производства сельскохозяйственной продукции. Это организованная определённым образом система иерархически связанных объектов, например, в растениеводстве.
ч R - R = R- = R- = RR = ■ = Rv , где A(R) - агроценоз в растениеводстве, R1 ; R2 ; R3 ; R4 ; RN - соответственно поля, посевы, культуры, организмы, органы и другие множества объектов.
Соответственно, в животноводстве:
Л(6) с6т с G2 с63 с G4 с ■■■ с GN, где A(G) - агроценоз в животноводстве, G1 ; G2 ; G3 ; G4 ; GN - соответственно комплексы, фермы, пастбища, животные, стати и другие множества объектов.
Виртуальное взаимодействие объектов многоуровневой системы агроценозов можно наглядно отобразить в виде топологических связей, как путём «сопряжения-субординации», так и путём «вложения-подчинения». «Сопряжение-субординация» - это пространственно- временной динамический процесс «горизонтального» парного или группового взаимодействия объектов внутри множества, например: сближение, касание, вхождение, слияние, выдвижение, расхождение, удаление. «Вложение-подчинение» - это пространственно-временной динамический процесс «вертикального» парного или группового взаимодействия между объектами различных множеств, например: двухуровневого, многоуровневого, одноразового, многоразового, переподчинённого, переподчиняющего, опосредованного, непосредственного, прямого, косвенного.
На рисунке 2 изображён трансформируемый граф иерархически разветвлённой схемы организации технологии проактивного управления в агротехноценозе. В зависимости от научно-технического уровня реализации каждая из трёх системно организованных составляющих (1, 2, 3) технологии может иметь различные внутренние процессы: А', В', С'. В свою очередь, выделенные в них процессы могут иметь разнообразные средства: А, В, С. Используемые для реализации процессов средства могут иметь многовариантные состояния: а, в, с. Обозначим, для примера, буквами: А', А, а - объекты реальной природы; В', В, в - объекты информационно-аналитической природы; С', С, с -объекты роботизированной технологии.
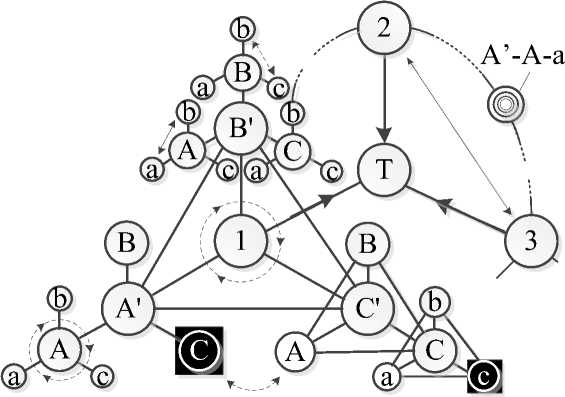
1, 2, 3 - системно организованные составляющие технологии проактивного управления; Т - единая интегрированная технология проактивного управления; А', В', С' - технологические процессы;
А, В, С - технические средства; а, в, с - варианты состояний Рисунок 2 - Универсальная динамическая модель проектирования и перепланирования системной сложности агротехноценозов
Вертикально-горизонтальные взаимодей- быть гармоничными (симметричными, фрак- ствия объектов в структуре агроценозов могут тальными, периодическими, аддитивными,
энергоэкономными, высокоинформативными и т.д.) или при отсутствии взаимной согласованности объектов - деформированными (асимметричными, мутирующими, апериодическими, распадающимися, энергозатратными, слабо изученными) как по связям между собой, так и по пространственно-временным параметрам.
Например, «сопряжение-вложение» объектов может быть неадекватным, неправильным, неполным, неэффективным, отторгаемым, путём смятия, закручивания, натягивания, разрыва, загибания, перевёртывания и многих других процедур темпо-топологического представления.
Такими дискретно-модульными действиями можно охарактеризовать непрерывный процесс самоорганизации живых биообъектов и объектов искусственной технической организации, например в более расширенном масштабе, в антропогеоагротехноценозах. При этом можно выделить две интерактивные тенденции: развитие и деградация. Они проявляются в повторяющихся, возобновляющихся или обновляющихся циклах с годовой, сезонной, суточной или другой периодичностью.
Приведенные динамически изменяющиеся структуры позволяют установить несколько системных типов трансформации и перепланирования системной сложности антропогеоагротех-ноценозов: иерархической, сетевой, ветвящейся, вращающейся, сотовой, циклической [12].
Особый интерес представляют процессы синергетического взаимодействия, когда в результате совмещения самоорганизующихся живых и искусственно организованных структур в единый агротехноценоз образуется новая целостность объектов с эмерджентным (кооперативным, совокупным) эффектом, превышающим суммарный эффект.
Эм > 2(ЭМ), где ЭМ - общесистемный положительный эффект инновационного агротехноценоза;
Е (ЭМ) - сумма положительных эффектов объектов, входящих в агротехноценоз.
Синергетическому эффекту присуще двойственное значение: во-первых, проявление в виде полезного результата (результирующего эффекта) при практической реализации, во-вторых, наличие положительной ценности в виде отложенного (сохраненного в базе данных) перспективного результата (обеспечивающего целенаправленный полезный эффект) при виртуальном моделировании процессов. Значимость второй составляющей синергетического эффекта существенно увеличивается при многократных повторениях и тиражировании (развитии и совершенствовании) агротехнологии. Результирующий эффект мультипликативно возрастает:
Э > Эм + Эи = 5(ЭМ) + (эи)*, где ЭИ - интеллектуальная составляющая эффекта;
N - показатель роста интеллектуальной составляющей эффекта.
Перепланирование (трансформация) системной сложности антропогеоагротехноцено-зов возможно при осуществлении текущей си-стемометрии в условиях динамической изменчивости природы и социальной среды для точной идентификации системы и дефиниции её целеадаптивных характеристик. Идентификация - это оценка природосообразности, адекватности и целенаправленности поведения компонентов агротехнологической системы в ходе достижения запланированных целей. Самоидентификация происходит путём группового, многоагентного мониторинга элементов природной и социальной структур, определения их взаимосвязанности с компонентами агросистемы.
Схема интерактивных творческих многоактных этапов прогрессирования аграрного производства в ходе его функционирования представлена на рисунке 3.
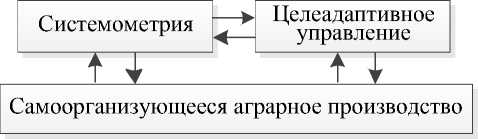
Рисунок 3 - Схема интерактивных циклов многократных творческих этапов развития сельскохозяйственного производства
При этом самоорганизующемуся аграрному производству системно присущи свойства сенсорно-информативного восприятия (измерения) индивидуальной структурно-компонентной сложности, самостоятельно и целеадаптивно регулируемой по результатам данных системо-метрии.
Процесс установления наиболее важных и значимых взаимосвязей между компонентами агробиотехнической системы аналитически отображает устремленный к идеалу функционал составляющих цели управления:
S =F(A, R,Z, С, Г) —* идеал «синергетика ЕМиИМ», где S – составляющие цели управления; A – множество компонентов в составе агросистемы; R – множественные взаимные связи между компонентами агросистемы; Z – структурно-композиционный показатель связанности агросистемы; С – окружающая среда; T – общая продолжительность функционирования агросистемы; ЕМ – естественно-природная модель жизни; ИЖ – искусственно организованная модель жизни.
Ожидаемые показатели конкурентных преимуществ применения проактивного управления и группового использования самоадапти-рующихся видеороботов: улучшение условий труда, привлечение молодёжи к новым условиям труда, снижение издержек производства и потерь продукции, повышение производительности труда, улучшение качества производимой продукции, снижение затрат труда и энергоресурсов на её производство.
Результаты инновационных научных исследований обладают новизной, высоким уровнем патентоспособности и лицензионными возможностями, обеспечивающими значимый технико-экономический результат от применения продукции за счёт будущей коммерциализации.
Основные задачи научных исследований:
– разработка системоорганизующих принципов, методологических подходов, методик, программ информационно-аналитического управления агрообъектами системной сложности, а также проектов и технических решений прикладных производственных проблем;
– компьютерное моделирование системной сложности и программное макетирование технико-технологических решений, изготовление макетов экспериментальных образцов, комплектация оборудования, проведение исследовательских испытаний;
– разработка основных регламентов для создания технологии информационно-аналитического управления агрообъектами системной сложности на основе видеоаналитики, видеосемантики и диспетчеризации;
– подготовка сопроводительных материалов (методик исследований, алгоритмов, программ).
Выводы
-
1. Дальнейшее совершенствование аграрного производства целесообразно осуществлять на основе разработки системы проактивного управления, упреждающего проявление негативных тенденций.
-
2. Групповое применение наземных и авиационных видеороботов, оснащённых современными поисково-преобразовательными функциями, открывает новые возможности для модернизации аграрного производства.
-
3. Организация системометрического проактивного управления агротехноценозами позволит осуществлять более глубокую и адаптивную структурно-функциональную оптимизацию аграрного производства, повышающую её эффективность.
Список литературы Проактивное моделирование динамической сложности агротехноценозов
- Охтилев, М.Ю. Системы искусственного интеллекта и их применение в автоматизированных системах мониторинга состояния сложных организационно-технических объектов / М.Ю. Охтилев. - СПб: ГУАП, 2018. - 261 с.
- Микони, С.В. Квалиметрия моделей и полимодельных комплексов: монография / С.В. Микони, Б.В. Соколов, Р.М. Юсупов. - М.: РАН, 2018. - 314 с.
- Иванов, А. Сельское хозяйство по-умному / А. Иванов, В. Моисеев // Приложение к журналу "Control Engineering". - 2017. - Апрель. - С. 35-71.
- Суханова, М.В. Актуальность использования интеллектуальных систем управления динамическими процессами смешивания компонентов сыпучего тела в устройствах для предпосевной обработки семян / М.В. Суханова, В.В. Мирошникова, А.В.Суханов // Вестник аграрной науки Дона. - 2019. - № 1 (45). - С. 45-54.
- Sukhanova, M.V. Substantiation of physical and mathematical model and determination of accelerations under the action of the elastic mixer driving forces / M.V. Sukhanova // ARPN Journal of Engineering and Applied Sciences. - 2014. - Т. 9. - № 11. - С. 2268-2274.
- Переход сельского хозяйства к цифровым, интеллектуальным и роботизированным технологиям / Е.А. Скворцов, Е.Г. Скворцов, И.С. Санду, Г.А. Иовлев // Экономика региона. - Екатеринбург: Изд-во Института экономики Уральского отделения РАН. - 2018. - Т. 14. - № 3. - С. 1014-1028.
- A comprehensive review on automation in agriculture using artificial intelligence / Kirtan Jha, Aalap Doshi, Poojan Patel, Manan Shah // Artificial Intelligence in Agriculture. - 2019. - Vol. 2. - Р. 1-12. - URL:
- DOI: 10.1016/j.aiia.2019.05.004
- Time-optimal guidance control for an agricultural robot with orientation constraints / Fuhong Dong, Olaf Petzold, Wolfgang Heinemann, Roland Kasper // Computers and Electronics in Agriculture. - 2013. - Vol. 99. - Р. 124-131. - URL:
- DOI: 10.1016/j.compag.2013.09.009
- Automatic control of farming operations based on spatial web services / J. Kaivosoja, M. Jackenkroll, R. Linkolehto, M. Weis, R. Gerhards // Computers and Electronics in Agriculture. - 2014. - Vol. 100. - Р. 110-115. - URL:
- DOI: 10.1016/j.compag.2013.11.003
- Мирошникова, В.В. Совершенствование технологии производства животноводческой продукции на молочной ферме модульного типа замкнутого цикла / В.В. Мирошникова, И.Н. Краснов // Известия Горского государственного аграрного университета. - 2016. - Т. 53. - № 4. - С. 92-98.
- Башилов, А.М. Автономные беспилотные летательные аппараты в точных системах агропроизводства / А.М. Башилов, В.А. Королев // Вестник аграрной науки Дона. - 2018. - № 3 (43). - С. 76-82.
- Башилов, А.М. Видеоцифровое системометрическое управление агротехнологическими процессами / А.М. Башилов, В.А. Королев // Вестник аграрной науки Дона. - 2019. - № 4 (48). - С. 68-74.
- Link, J. Developing and evaluating an aerial sensor platform (ASP) to collect multispectral data for deriving management decisions in precision farming / J. Link, D. Senner, W. Claupein // Computers and Electronics in Agriculture. - 2013. - Vol. 94. - Р. 20-28. - URL:
- DOI: 10.1016/j.compag.2013.03.003
- Huuskonen, Janna. Soil sampling with drones and augmented reality in precision agriculture / Janna Huuskonen, Timo Oksanen // Computers and Electronics in Agriculture. - - 2018. - Vol. 154. - Р. 25-35. - URL:
- DOI: 10.1016/j.compag.2018.08.039
