Проблемы агент-ориентированного моделирования формирования эффективной территориальной сети лесных дорог

Автор: Гулин Константин Анатольевич, Дианов Сергей Владимирович, Алферьев Дмитрий Александрович, Дианов Даниил Сергеевич
Журнал: Экономические и социальные перемены: факты, тенденции, прогноз @volnc-esc
Рубрика: Региональная экономика
Статья в выпуске: 1 т.16, 2023 года.
Бесплатный доступ
Рассматриваются концептуальные и методологические аспекты создания компьютерных имитационных агент-ориентированных моделей, обеспечивающих принятие решений по формированию эффективно функционирующей территориальной сети лесных дорог. Ключевая цель исследования состоит в интерпретации и апробации сервис-ориентированного подхода к построению подобных моделей. В основу подхода заложен принцип взаимодействия распределенных в пространстве объектов - поставщиков и потребителей сервисов. Рассмотрена проблематика построения и эксплуатации сети лесных автомобильных дорог, обеспечивающих процессы лесозаготовки. Сложность решения этих задач определяется большим количеством взаимодействующих элементов и оцениваемых параметров, различных по специфике величины их влияния на систему в зависимости от конкретной территории. В связи с этим для решения данных задач широко используются методы имитационного моделирования, одним из наиболее перспективных среди которых считается агент-ориентированный подход. При этом определено, что их построение осуществляется без использования формализованной методологической основы, что не позволяет интерпретировать полученные здесь результаты в качестве единой концепции формирования агент-ориентированных моделей в данной предметной области. Авторами предложена претендующая на заполнение указанной ниши собственная концепция, базирующаяся на сервис-ориентированном подходе. Представлены основные фрагменты формального описания разработанного подхода. Рассмотрены отдельные аспекты его прикладной интерпретации на примере реализованного прототипа игровой агент-ориентированной модели в среде AnyLogic. Для решения поставленных задач использовались общенаучные методы формализации, абстрагирования, обобщения, методы системного анализа, агент-ориентированного моделирования. Результатами работы стали развитие и апробация авторской концепции агент-ориентированного моделирования эффективной территориальной транспортной инфраструктуры системы лесозаготовки. Новизна концепции заключается в использовании сервис-ориентированного подхода. Кроме того, концепция может позиционироваться в качестве универсальной основы построения рассматриваемых моделей. Для этого потребуются развитие методологических аспектов ее применения, полномасштабная интерпретация относительно возможных вариантов использования, а также практическая апробация на реальных системах.
Инфраструктура системы лесозаготовки, транспортная доступность лесных ресурсов, эффективная дорожная сеть, агент-ориентированное моделирование, сервис-ориентированный подход
Короткий адрес: https://sciup.org/147240288
IDR: 147240288 | УДК: 630:330.4 | DOI: 10.15838/esc.2023.1.85.4
Agent-based modeling in the formation of an effective territorial network of forest roads
The paper considers conceptual and methodological aspects in creating computer simulation agent-based models which provide decision-making on the formation of an effective territorial network of forest roads. The key aim of the research is to interpret and test a service-oriented approach to building such models. The approach is based on the principle of interaction between the following objects distributed in space: service providers and consumers. We consider issues related to constructing and operating a network of forest roads used for forest harvesting processes. Complexity in solving these problems is due to a large number of interacting elements and estimated parameters that differ in their impact on the system depending on a particular territory. Thus, such problems are solved using simulation modeling methods, in particular, the agent-based approach, which is one of the most promising ones among them. At the same time, it is determined that they are constructed without using a formalized methodological framework, which does not allow us to interpret the results obtained here as a unified concept of formation of agent-based models in the subject area. To fill this niche, we propose our own concept based on the service-oriented approach. We present main fragments of formal description of the approach and describe some aspects of its applied interpretation using a prototype of game agentbased model in AnyLogic environment. We use general scientific methods: formalization, abstraction, generalization; methods of system analysis and agent-based modeling. As a result of the work we developed and tested our own concept of agent-based modeling of effective territorial transport infrastructure of the harvesting system. The novelty of the concept lies in the use of service-oriented approach. In addition, the concept can be used as a universal basis for building the models in question. This will require the development of methodological aspects of its application, a full-scale interpretation of the possible uses, as well as practical testing on real systems.
Текст научной статьи Проблемы агент-ориентированного моделирования формирования эффективной территориальной сети лесных дорог
Согласно докладу Продовольственной и сельскохозяйственной организации Объединенных наций «О состоянии мировых лесов» за 2022 год ожидается, что глобальное потребление всех природных ресурсов увеличится с 92 миллиардов тонн в 2017 году до 190 миллиардов тонн в 2060 году. При этом с 24 до 44 миллиардов тонн возрастет объем потребления биомассы, крупнейшим потребителем которой является лесная и деревообрабатывающая промышленность1. Устойчивое удовлетворение спроса на лесную биомассу потребует увеличения предложения лесных ресурсов. Огромными лесными ресурсами обладает Российская Федерация. Однако большая часть лесов произрастает в условиях сурового климата, что обусловливает высокие издержки при заготовке и транспортировке древесины (Гребенюк, Гарус, 2014). В связи с этим особую актуальность имеет вопрос о возможности построения эффективной территориальной инфраструктуры системы лесозаготовки. Не случайно расширение сети лесных дорог заявлено в качестве одного из базовых условий перехода к интенсивной модели ведения лесного хозяйства в «Стратегии развития лесного комплекса Российской Федерации до 2030 года». По расчетам Всероссийской лесоучетной организации для освоения расчетной лесосеки требуется не менее 7 километров всех видов дорог на 1 тысячу гектаров лесной площади. Сейчас этот показатель составляет 2,4 километра2. Наиболее существенная нехватка дорог отмечается в зоне перспективного освоения лесов, что обусловливает неравную степень техногенного воздействия на лесную экосистему в части заготовки древесных ресурсов, создающую риски обезлесения одних территорий и образования значительных площадей перестойных лесов на других. В связи с этим развитие сети лесных дорог представляет собой одну из ключевых задач при повышении эффективности лесопользования (Мохирев и др., 2017).
Функционирование лесозаготовительного производства обеспечивается комплексом производственно-транспортных объектов. Параметры размещения объектов, их конструктивные и технологические решения определяют затраты на производство лесозаготовок, его эффективность и безопасность (Афоничев и др., 2014). Вопрос о финансовых вложениях в строительство дорог на сегодняшний день остается дискуссионным (Курьянов, Морковин, 2009). Рентабельность строительства лесной дороги оценивают с помощью расчета оптимальной плотности сети дорог. Оптимизацию плотности сети дорог сводят к задаче сравнения затрат на перевозку лесоматериалов с затратами на строительство (Герасимов и др., 2009). Поиск оптимального варианта заключается в том, что повышение качества автодороги приводит к ее удорожанию, но одновременно уменьшает затраты непосредственно на вывозку древесины (Мохирев и др., 2019). Для определения экономической целесообразности строительства лесовозных дорог следует сопоставить дополнительные капиталовложения с экономией текущих производственных затрат. Эта экономия достигается не только на транспортных опера- циях. Хорошие дороги обеспечивают ритмичную работу всех звеньев лесозаготовительного производства, что позволяет в максимальной степени использовать основные фонды и трудовые ресурсы, поднять уровень его организации. В результате себестоимость заготовки древесины снижается на 20–80% (Починков, 2000). Эффективность инвестиций в строительство новых транспортных путей может оцениваться по увеличению регионального валового внутреннего продукта и повышается, если на территории региона наряду с лесными используются другие природные ресурсы (Якушева и др., 2014).
Общая задача создания территориальной сети лесных дорог формулируется следующим образом: подобрать места расположения и параметры инфраструктурных узлов и путей между ними, а также структуры и схемы передвижения транспортных средств системы лесозаготовки таким образом, чтобы обеспечить наиболее рентабельный вариант заготовки и транспортировки лесных ресурсов на продолжительном периоде, с учетом обеспечения их эффективного возобновления, из узлов лесных участков территории в инфраструктурные узлы первичной обработки или складирования. Сложность данной задачи предполагает использование современного инструментария, способного обеспечить поддержку управленческих решений в этой сфере. Методические инструменты и программное обеспечение, разработанные в зарубежных странах, не всегда применимы в российских природно-производственных и экономических условиях. В России подходы к обоснованию параметров транспортировки древесных ресурсов еще недостаточно хорошо развиты, а в существующих отечественных научных работах отсутствует решение целого ряда задач по развитию лесотранспортного потенциала страны. Это свидетельствует о необходимости выполнения и актуальности научных исследований по повышению транспортно-экономической доступности древесных ресурсов РФ (Мохирев, Рукомойников, 2022). В качестве одного из наиболее перспективных инструментов подобного рода может быть использовано агент-ориентированное моделирование, которое в последние годы все более активно применяется в работах, посвященных проблемам лесного комплекса.
Основная цель исследования состоит в интерпретации и апробации сервис-ориентированного подхода к построению агент-ориенти-рованных моделей, обеспечивающих формирование эффективно функционирующей территориальной сети лесных дорог.
Новыми научными результатами являются развитие авторской концепции создания агент-ориентированных моделей, основанной на использовании сервис-ориентированного подхода, для моделирования эффективной территориальной транспортной инфраструктуры системы лесозаготовки и ее практическая апробация.
Практическая значимость полученных результатов заключается в развитии методологии построения агент-ориентированных моделей, обеспечивающих процессы поддержки принятия решений при формировании территориальной сети лесных дорог.
Методы
На сегодняшний день имеются исследования, посвященные отдельным проблемам формирования пространственных сетей, таким как расположение узлов сети, эволюция транспортных сетей с учетом их использования субъектами деятельности. Методы обоснования нахождения кратчайших путей между вершинами графа описаны в (Bellman, 1958; Dijkstra, 1959; Moore, 1959; Floyd, 1962). Они позволяют осуществить анализ статических элементов работы предприятий и служат базой для реализации стационарно-динамических задач потокового программирования при рационализации потоков в транспортных системах (Mokhirev et al., 2019). В ряде научных работ представлены математические модели, направленные на решение задачи оптимизации структуры лесного сектора с акцентом на размещение и доступность. А.Г. Третьяков (Третьяков, 2019) для решения подобных задач использует симплекс-метод линейного программирования (Kumar, Kaur, 2010). Математические модели, представленные в трудах И.Р. Шегельмана (Shegelman, 2001; Shegelman, et al., 2005), предназначены для обоснования сквозных потоков заготовки, транспортировки и переработки древесины. Оптимизационные модели, предложенные Б.А. Ильиным (Ильин, 1987), позволяют рассчитать ширину зоны тяготения временной дороги. Решение задачи нахождения оптимально го маршрута вывозки древесины из лесосеки с использованием алгоритма Дейкстры и метода динамического программирования представлены в работе (Мохирев и др., 2018). В научной публикации Е.Г. Гладкова (Гладков, 2005) описана математическая модель функционирования лесозаготовительного предприятия.
Однако возможности практического использования рассмотренных методов невелики. Такие модели, как правило, статичны и обсчитаны на примерах с небольшим объемом входных данных. Они характеризуют возможность прохождения по дугам каждого временного интервала лишь одного варианта потока и не учитывают специфику лесозаготовительной отрасли, предусматривающую при обосновании графика технологического процесса лесозаготовительных работ необходимость комплексного решения задач разработки нескольких лесосек в течение одного временного диапазона (Мохирев и др., 2019).
Многими учеными исследуется возможность применения имитационного моделирования для решения задач, связанных с повышением эффективности лесозаготовительного производства (Суханов и др., 2012; Васильев, Корныльева, 2015; Рукомойников и др., 2020; Lim, 2012). Имитационное моделирование обеспечивает подробное описание системы и позволяет анализировать ее динамические характеристики (Макаров и др., 2019; Россошанская, 2019). Имеющиеся модели охватывают широкий диапазон задач в рассматриваемой предметной области: нахождение оптимальных путей транспортировки лесоматериалов (Соколов, Осипов, 2017; Комаров и др., 2019), организация взаимодействия автопоездов (Никитин и др., 2016), выбор типа проектируемой дороги на участке транспортной сети (Мохирев и др., 2019), организация транспортных потоков3, оптимальное распределение грузопотоков лесоматериалов4, синтез оптималь- ного лесозаготовительного плана (Герасимов и др., 2011). Набор используемых при этом методов разнообразен: сети Петри (Соколов, Осипов, 2017), нечеткие сети (Комаров и др., 2019), метод Монте-Карло (Никитин и др., 2016), математическое моделирование и геоинформатика (Герасимов и др., 2011; Мохирев и др., 2017), дискретно-событийное и агент-ориентирован-ное моделирование (Мохирев, Рукомойников, 2022). Значительные возможности для решения проблемы эффективного использования лесных ресурсов территорий предоставляет инструментарий агент-ориентированного моделирования (Гулин, Антонов, 2017; Huff et al., 2015). Его весомым преимуществом является возможность учитывать динамику изменения характеристик исследуемых сущностей во времени и их пространственного размещения, а также структуру взаимосвязей между исследуемыми сущностями (Arifin, Madey, 2015; Janssen, 2017; Scholz et al., 2017; Holm et al., Fitzpatrick, 2018; Zupko, Rouleau, 2019; Scholz et al., 2021; 2018; Sotnik et al., 2021). Проблема заключается в том, что построение таких моделей осуществляется без использования формализованной методологической основы. Это не позволяет интерпретировать полученные здесь результаты в качестве единой концепции формирования агент-ориентированных моделей в данной предметной области.
В рамках решения обозначенной проблемы авторами разработана концепция агент-ориен-тированного моделирования эффективной территориальной транспортной инфраструктуры системы лесозаготовки, базирующаяся на сервис-ориентированном подходе (Дианов, 2020). Основополагающим элементом концепции является модель (M), основанная на взаимодействии мобильных и стационарных сервисов и пользователей. Все объекты модели могут выступать в ролях потребителей и поставщиков услуг. В рамках процесса предоставления услуг они должны взаимодействовать либо непосредственно, либо с использованием иных объектов модели. Взаимодействие осуществляется в конфигурации территориальной транспортной сети. В процессе оказания услуг формируются значения заданного набора параметров оценки успешности функционирования модели – целевых показателей (CRP). Основная цель модели- рования заключается в нахождении при имеющихся ресурсах (mLim) наиболее оптимальной архитектуры функционирования моделируемой системы исходя из значений целевых показателей.
Имеются следующие элементы модели.
-
1. Узлы ( U ) – точки в пространстве, где могут располагаться объекты модели. Каждый узел имеет свой идентификатор ( uID ).
-
2. Пути ( S ) соединяют узлы. По ним передвигаются объекты модели. Содержат следующий набор атрибутов: идентификатор (sID); соединяемые узлы uID(U1) и uID(U2); тип (sT); длина (sL); набор параметров состояния (pS). Набор параметров определяет характеристики передвижения по пути объектов модели. Примерами таких параметров могут служить минимальная глубина водного пути, ровность проезжей части автомобильной дороги и др. Каждый параметр имеет имя (psNm), домен (psD) и значение (psV). Домен определяет диапазон возможных значений параметра. Пути могут объединяться в маршруты (W = {S}).
-
3. Объекты (O). Могут обозначать широкий диапазон разнообразных элементов моделируемой системы. Имеют имя (oN), место постоянной дислокации в узлах (oConstD), тип (oT). Важным параметром объекта выступает тип мобильности (oTyMob). Его домен содержит два значения: true и false. В случаях когда значение oTyMob = false, объект является стационарным. При этом он не может самостоятельно (либо вообще) перемещаться из узла определенной для него дислокации. Если значение oTyMob = true, то в параметрах объекта формируется таблица характеристик его мобильности (oTabMob). В ней определены возможные типы путей перемещения объекта и средняя скорость перемещения объекта (oSpeed) по каждому из них: oTabMob = {〈sT, oSpeed〉} . Для данного вида объектов также определяется параметр текущей дислокации (oCurD).
С каждым типом объекта связаны наборы потребностей (O({oNeed})) и предоставляемых сервисов (O({oServ})). На уровне объекта в каждый момент времени моделирования поддерживается набор активизированных потребностей (O({oNeed}A)) и сервисов (O({oServ}A)). Активизированные потребности содержат имена потребностей и наборы характеризующих их параметров: oNeedA(oNeedNamej, {oNeedParNm, oNeedParV}) . Здесь каждый параметр имеет свое конкретное значение oNeedParV . Активизированные сервисы содержат связку объекта Ok, которому предоставляется сервис, и обрабатываемой у него активизированной потребности oNeedtA(Ok), а также имя предоставляемого сервиса oServNamep и место его предоставления Um.
Отработка потребностей и сервисов осуществляется в рамках модели поведения объекта. Потребности возникают исходя из определенного состояния параметров объекта (oPar). Параметры имеют имя (oParNm), домен (oParD) и значение: oPar = 〈oParNm, oParD, oParV〉 . Для каждой потребности в модели поведения объекта формируется отдельный модуль идентификации потребностей (oNeedModId), где определяются формулы (F), с помощью которых решается задача идентификации каждой потребности. Идентифицированные потребности размещаются в наборе активизированных потребностей.
В модели поведения объекта для каждой потребности определяется модуль ее реализации. Он разделен на два блока: блок поиска сервиса и блок доступа к сервису.
При поиске поставщика сервиса объекты могут использовать активное и пассивное поведение. При пассивном поведении они либо информируют поставщиков сервисов об имеющейся потребности и ожидают их реакции, либо просто ждут проявления заинтересованности к ним со стороны поставщиков сервисов. В первом случае объектам, предоставляющим необходимый сервис, посылается сообщение, содержащее имя автора сообщения и активизированную потребность: msgNeedA(oNthls, oNeed A ) . Во втором случае блок поиска сервиса не определяется. Отличительной особенностью данного вида поведения объектов является их полная пассивность по выбору поставщика – поставщики сами в конкурентной борьбе определяют, кто из них будет предоставлять сервис.
В случае активного поведения объекты самостоятельно ведут поиск поставщика сервиса. Поиск связан с выбором наиболее оптимального для потребностей объекта в текущий момент времени. Для этого определяется критерий оптимальности выбора поставщика сервисов (CrFS). Он может быть как критерием минимизации, так и критерием максимизации для различных вариантов выбора. При расчете критерия осуществляется анализ параметров путей доступа к сервису, объекта предоставления сервиса и самого объекта:
CrFS =
Г f W i (sT, sL, pS), O j (oTyMob, oTabMob, oConstD, oCurD, oPar),\|CountOS
( \ oTyMob, oTabMob, oConstD, oCurD, oPar Л1
;
min/max(CrFS) ^ (OS,US,WS), где OS – выбранный объект предоставления сервиса, US – узел получения сервиса, WS – маршрут доступа к узлу получения сервиса.
Алгоритм функционирования блока поиска сервиса состоит из следующих шагов: генерация возможных маршрутов взаимодействия; расчет критерия оптимальности выбора поставщика сервисов по каждому маршруту; выбор оптимального варианта; пересылка сообщения выбранному объекту предоставления сервиса, в котором содержатся имя объекта получения сервиса, потребность и место получения сервиса: msgNeedO(oNthls, oNeed A , Us).
Блок доступа к сервису определен только для мобильных объектов. Он используется в случае, когда узел предоставления услуги не совпадает с узлом текущей дислокации объекта получения услуги. Он также активизируется в случае получения сообщения от объекта, предоставляющего сервис об узле, в котором будет оказана услуга, и пути перемещения к нему msgServU(US, WS). В соответствии с определенным маршрутом доступа к узлу получения услуги осуществляется перемещение объекта. При этом параметры передвижения зависят от параметров самого объекта и параметров путей, из которых состоит маршрут. Общее время на прохождение маршрута определяется суммой времени, затраченной на прохождение путей, из которых состоит маршрут. В свою очередь время прохождения пути определяется на основе некоторой функциональной зависимости: ti = F(sL, pS, oSpeed, oPar), где выбирается из таблицы характеристик мобильности объекта oTabMob. В блоке доступа к сервису также могут быть определены воздействия, оказываемые объектом на параметры путей, по которым он перемещается, а также изменение параметров объекта после прохождения пути.
Модель поведения каждого объекта, предоставляющего сервисы, содержит модули идентификации сервисов, принятия обязательств по предоставлению сервиса и предоставления сервиса.
Модуль идентификации сервисов используется в случаях, когда объект, предоставляющий сервис, осуществляет самостоятельный поиск объектов для предоставления сервиса. Алгоритм его работы состоит из следующих шагов: осуществляется поиск в наборе активных потребностей объекта O({oNeed} A ); определяется факт обслуживания потребности; если факт обслуживания потребности не подтверждается, то объект готовит и посылает в свой адрес сообщение, содержащее имя объекта, нуждающегося в сервисе, и активизированную потребность: msgNeedA(oN, oNeed A ).
На вход модуля принятия обязательств по предоставлению сервиса поступают сообщения о потребности в сервисе. Здесь решаются задачи о возможности предоставления сервиса и, в случае положительного решения, его параметрах. Для определения параметров предоставления сервиса рассчитывают критерий эффективности предоставления сервиса (CrES) для всех возможных путей предоставления сервиса (CountW) с учетом мобильности взаимодействующих объектов:
CrES =
(f fWi(sT, sL, PS), Oj(oTyMob, oTabMob, oConstD, oCurD, oPar)A)CountW oTyMob, oTabMob, oConstD, oCurD, oPar min/max(CrES) ^ (US,WS).
После выбора параметров предоставления сервиса объект вступает в диалог с иными объектами модели, планирующими взять на себя обязательства по предоставлению рассматриваемого сервиса. В этом диалоге объекты обмениваются информацией о рассчитанных критериях эффективности предоставления сервиса. По его результатам выбирается объект, предоставляющий сервис, который готовит и посылает себе сообщение, содержащее имя объекта получения сервиса, потребность, место и путь получения сервиса: msgNeedO(oN, oNeedA, US, WS). В случае когда узел предоставления услуги не совпадает с узлом текущей дислокации мобильного объекта получения услуги, ему передается сообщение, содержащее узел и путь получения сервиса msgServU(US, WS). Одновременно с этим формируется соответствующий элемент в наборе активизированных сервисов объекта.
Модуль предоставления сервиса активизируется при поступлении сообщений с параметрами принятых для обработки потребностей. Здесь решаются задачи по перемещению к узлу предоставления сервиса и предоставлению сервиса.
Блок перемещения к узлу предоставления сервиса определен только для мобильных объектов. Он используется в случае, когда узел предоставления услуги не совпадает с узлом текущей дислокации объекта. Его содержание аналогично содержанию блока доступа к сервису, рассмотренному применительно к объектам, реализующим потребности.
После отработки блока перемещения к узлу предоставления сервиса активизируется блок предоставления сервиса. Здесь на первом шаге осуществляется мониторинг нахождения объектов взаимодействия в одном узле. При соблюдении данного условия инициируется процесс предоставления сервиса. Он связан с изменением параметров взаимодействующих объектов в течение определенного времени. Величина изменений на каждом временном шаге зависит от совокупности значений текущих параметров объектов: oPar i (ON) ^ F ^oPar(OS), oPar(ON)) ; oPar i (OS) ^ F (oPar(OS),oPar(ON)). Предоставление сервиса прекращается при достижении определенных значений в параметрах объекта предоставления сервиса, заданных в некоторых параметрах сервиса: oPari (ON) < oServPar j (OS) . После этого удаляются соответствующие элементы из наборов активизированных потребностей и сервисов взаимодействовавших объектов.
В процессе моделирования формируются различные архитектурные композиции моделируемой системы. Количество возможных вариантов ограничивается спецификой предметной области и имеющимися ограничениями ресурсов mLim. Далее производится моделирование по каждому из вариантов в течение определенного времени моделирования TM. По результатам рассчитываются значения показателей эффективности модели (IE), которые являются производными от значений параметров объектов модели, фиксируемых в ходе модели- рования: IEi = F({oParO^TM}). Набор полученных показателей для каждой модели сравнивается с набором целевых показателей CRP и определяется наиболее оптимальный вариант архитектуры моделируемой системы.
Результаты
В целях практической апробации представленной концепции в ее отдельных аспектах, а также демонстрации возможностей ее интерпретации был создан прототип агент-ориен-тированной модели инфраструктуры лесозаготовки. Он не является отображением реальной системы. На данном этапе авторы не стремились к точному соотнесению модели предметной области. Многие элементы прототипа носят демонстрационный характер. Рассматривается процесс лесозаготовки с использованием автомобильных дорог. Применяется сортиментная технология заготовки. Предполагается, что существуют две транспортные базы: база лесозаготовительной техники и база большегрузной автомобильной техники, способной транспортировать лесозаготовительную технику. Их соединяет автомобильная дорога. Имеется лесной участок, к которому от автомобильной дороги, соединяющей транспортные базы, проложена лесная дорога. На базе лесной техники размещается один харвестер. В целях упрощения модели на данном этапе решено отказать- ся от моделирования работы форвардера. На базе автомобильной техники размещается один автомобиль. На лесном участке произрастает лесной массив. При его созревании запускается процесс рубки. При этом для доставки харвестера до лесной дороги используется грузовой автомобиль. Далее харвестер своим ходом доезжает до лесного участка и начинает рубку. По окончании рубки харвестер перемещается до автомобильной дороги, а затем грузовым автомобилем его доставляют на базу. Процесс моделирования осуществляется на длительном периоде, в течение которого происходит несколько моментов созревания лесного массива на участке. При прохождении транспорта ухудшаются характеристики лесной дороги, что сказывается на параметрах ее прохождения транспортом. Цель моделирования – изучить эффективность затрат на обеспечение качества покрытия лесных дорог. Критерием оценки модели выступает рентабельность процесса лесозаготовки. Она зависит от прибыли, полученной в результате заготовки древесной массы, и затрат, возникающих в процессе лесозаготовки. Используется условное время моделирования, не связанное со временем реальных процессов.
Прототип модели создан в среде AnyLogic.
В модели имеются четыре узла ( рис. 1 ): node (База перевозчиков) – место дислокации боль-
Рис. 1. Схема размещения узлов прототипа модели
Лесной участок
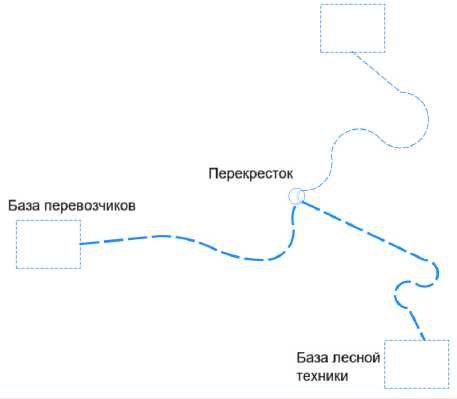
Источник: составлено авторами.
шегрузного автотранспорта, обеспечивающего перевозку лесозаготовительной техники; node1 (Лесной участок) – место размещения лесного участка, на котором осуществляется лесозаготовка; node2 (Перекресток) – общее место пересечения всех путей; node3 (База лесной техники) – место дислокации лесозаготовительной техники.
Созданы три элемента путей: path, соединяющий узлы node и node2; path1, соединяющий узлы node2 и node1; path2, соединяющий узлы node2 и node3. Пути path и path2 отображают автодороги общего пользования, а путь path1 – лесную автодорогу. Набор свойств данных элементов содержит единственный атрибут quality, определяющий качество дорожного покрытия. Домен его значений – действительные числа в диапазоне от 0 до 1. В прототипе модели данный параметр определен лишь для элемента path1. Исходя из специфики используемой среды моделирования для работы с параметрами элементов, для каждого из них создается агент. В данном случае создается агент Way, содержащий параметр quality. Данный агент имеет два состояния ( рис. 2 ): эксплуатации (Exploitation) и технического обслуживания (Service). В состоянии технического обслуживания увеличивается значение параметра quality. Переход в данное состояние осуществляется в соответствии с установленным интервалом времени (Service_period).
На уровне прототипа модели на данный момент не используется атрибут типа пути. Пред- полагается, что имеющиеся в модели объекты могут перемещаться строго по определенным для них маршрутам. Длина путей также носит условный характер.
В модели определены три объекта: лесной участок, харвестер и автовоз. У объекта лесной участок тип мобильности установлен как стационарный. У двух других объектов как мобильный. В таблицах характеристик мобильности данных объектов определены средние скорости перемещения. При этом объект харвестер может перемещаться только по лесной дороге, а объект автовоз – только по дорогам общего пользования.
Потребности определены на уровне объектов лесной участок и харвестер. Для первого объекта – это потребность в рубке, а для второго – потребность в доставке к лесной дороге. Сервисы определены на уровне объектов харвестер – рубка леса и автовоз – транспортировка техники.
Объект лесной участок имеет следующие параметры: возраст древостоя (Age), площадь древостоя (Square), объем древостоя (Volume). На каждом шаге моделирования изменяется значение параметра Volume в зависимости от текущих значений параметров Age и Square. Потребность в рубке возникает при достижении древостоем определенного возраста. При поиске поставщика сервиса объект лесной участок имеет пассивное поведение. При этом он высылает сообщение о готовности объекту харвестер.
Рис. 2. Диаграмма состояний агента Way
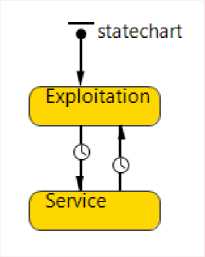
Источник: составлено авторами.
В среде моделирования объект лесной участок реализован с использованием двух агентов: Les и Manager. Первый формирует значения параметров объекта, а второй отслеживает текущее состояние объекта и отсылает сообщение при возникновении потребности в рубке. Агент Les имеет три состояния, характеризующих возраст древостоя ( рис. 3 ): молодой (Early), спелый (Ready) и переспелый (Late), а также состояние возрастного перехода (Change).
Агент Manager может находиться в двух состояниях ( рис. 4 ): мониторинга состояния агента Les (Select) и ожидания окончания предоставления сервиса по рубке (Wait). Находясь в состоянии Select, агент через определенные промежутки времени проверяет состояние агента Les. Если оно равно Ready, то агент посылает сообщение объекту харвестер о необходимости оказания сервиса. После передачи сообщения агент Manager переходит в состояние
Рис. 3. Диаграмма состояний агента Les
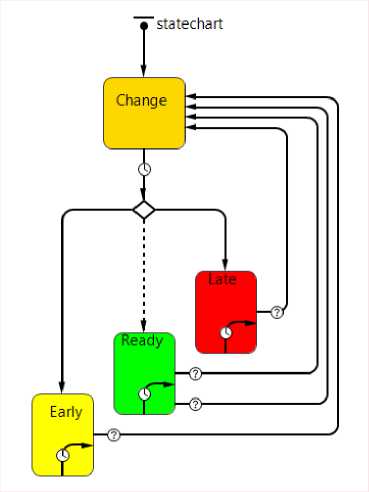
Источник: составлено авторами.
Рис. 4. Диаграмма состояний агента Manager
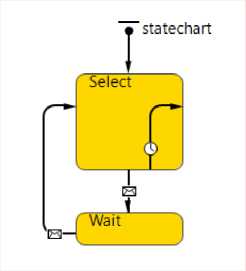
Источник: составлено авторами.
ожидания. В данном состоянии он находится до тех пор, пока не получит ответное сообщение от объекта харвестер об окончании предоставления сервиса.
Объект харвестер имеет параметр производительность (Performance) – объем леса, который он может вырубить за определенное время. Оказывая сервис рубки леса, он изменяет параметры Volume и Age объекта лесной участок. Одновременно с этим он увеличивает значение параметра общего заготовленного объема древесины (Zagotovleno). Данный параметр определен на общемодельном уровне. Объект харвестер реализуется в системе моделирования в виде агента Harvester. Данный агент имеет множество состояний, которые можно разделить на следующие группы: ожидание запроса на предоставление сервиса по рубке леса; получение сервиса по транспортировке до лесной дороги; перемещение по лесной дороге до лесного участка; предоставление сервиса по рубке леса; перемещение по лесной дороге до автомобильной дороги общего пользования; получение сервиса по транспортировке до базы лесной техники. Потребность в сервисе по транспортировке возникает при получении сообщения от объекта лесной участок о запросе сервиса либо после окончания предоставления сервиса после перемещения до дороги общего пользования. При поиске поставщика сервиса объект харвестер имеет пассивное поведение. При этом он отправляет сообщение объекту автовоз о наличии соответствующей потребности. Параметры сообщения содержат информацию о месте доставки.
Объект автовоз реализован в виде агента Auto. Агент активизирует функционал по предоставлению сервиса по перевозке после получения сообщения от объекта харвестер. Он перемещает харвестер в узел, указанный в сообщении. При этом предварительно он перемещается в место текущей дислокации харвестера. После оказания услуги агент Auto перемещается в узел node (База перевозчиков).
На уровне агентов Harvester и Auto определены переменные Current_time, в которых фиксируется время выполнения ими текущих опе- раций. На общемодельном уровне введены переменные Time_harvester и Time_auto, в которых накапливается общее время, затраченное агентами Harvester и Auto на выполнение операций. Для подсчета количества сервисных обслуживаний в модель введена переменная Service_count.
Регулируемыми параметрами в прототипе модели являются стоимость единицы объема заготовленной древесины (Price_forest); стоимость использования автовоза за единицу времени (Price_avto); стоимость использования харвестера за единицу времени (Price_ harvester); стоимость технического обслуживания лесной дороги (Price_service); период сервисного обслуживания лесной дороги (Service_ period).
В качестве целевого показателя для созданного прототипа модели выступает рентабельность процесса лесозаготовки. Для его расчета в модель введена переменная profitability. Она обновляется на каждом шаге модельного времени: profitability = Prtice_forest x Zagotovleno — (Price_harvester x Time_harvester + Price_avto x Time_auto + Service_count x Price_service).
С использованием созданного прототипа модели авторами был проведен ряд экспериментов ( рис. 5 ).
В таблице представлены результаты экспериментов, связанные с изменением параметра периода сервисного обслуживания лесной дороги при неизменности остальных параметров. Общее время моделирования 300 единиц модельного времени.
По результатам моделирования обращают на себя внимание следующие факты. Наилучший результат, с точки зрения рентабельности, был получен при периоде сервисного обслуживания, равном модельному времени. При этом наихудший результат по параметру рентабельность оказался наилучшим по объему заготовленной древесины. Т. е. за счет более качественного обслуживания лесной дороги повысилась скорость передвижения по ней харвестера к месту лесозаготовки. И это, в свою очередь, обеспечило больший объем лесозаготовки за моделируемый период.
Рис. 5. Окно с результатами моделирования
База перевозчиков

База лесной техники
0auto root-auto
0 harvester root.harvester( Performance = 3.0 )
rootway( quality = 0.20000000000000015 )
0 manager root.manager
О Zagotovleno 213
О Service_count
О Time auto *41.044 О Time harvester
111.867
Q Priceforest (3 Price_harvester Q Price_avto О зогосе" .service Q Service_period
О profitability * 1,073.312 7
Источник: составлено авторами.
Результаты экспериментов
|
№ п. п. |
Период сервисного обслуживания, единиц модельного времени |
Объем заготовленной древесины, условных единиц объема |
Рентабельность, условных денежных единиц |
|
1 |
300 |
213 |
1073,312 |
|
2 |
250 |
213 |
773,312 |
|
3 |
200 |
213 |
783,558 |
|
4 |
150 |
213 |
658,366 |
|
5 |
100 |
213 |
381,426 |
|
6 |
50 |
219 |
-419,146 |
|
Источник: составлено авторами. |
|||
Обсуждение
Анализируя полученные результаты, в целом можно утверждать, что поставленная цель исследования достигнута. С использованием практической реализации прототипа модели осуществлены интерпретация и апробация сервис-ориентированного подхода к построению агент-ориентированных моделей, обеспечивающих формирование эффективно функционирующей территориальной сети лесных дорог. В частности, были продуманы и апробированы механизмы, обеспечивающие определение целевых показателей и критериев оценки эффективности функционирования системы в условиях существования мобильных элемен- тов; формирование пространственного графа функционирования системы с учетом существующей инфраструктуры, способного отображать мобильность элементов системы; определение состава и параметров объектов системы в соответствии с сервис-ориентированной парадигмой; определение моделей поведения объектов системы с учетом их мобильности и направленности на предоставление/потребле-ние сервисов; распределение объектов системы в узлах пространственного графа; возможности манипулирования параметрами объектов, первичным распределением объектов в узлах пространственного графа. При этом стоит отметить, что в рамках исследования не проводи- лась интерпретация механизмов формирования конкурентного поведения элементов модели. Это связано со стремлением представить упрощенный вариант прототипа модели в целях ее лучшего восприятия. На следующем этапе исследований планируется развитие прототипа модели на примере реальной системы. Это позволит устранить существующие пробелы в интерпретации разработанных подходов к созданию подобной системы, а также уточнить их. Кроме того, представленный прототип в текущем виде не предназначен для проведения экспериментов, по результатам которых можно делать содержательные выводы об исследуемой системе. Получаемые результаты можно трактовать лишь с точки зрения оценки их общей адекватности моделируемым процессам. При этом следует учитывать, что созданный прототип модели способен выступать в качестве основы для построения агент-ориентированных моделей реальных систем. При развитии прототипа авторами планируется учесть множество факторов, влияющих на структуру транспортной сети и размещение отдельных составляющих ее дорог в лесном массиве, среди которых (Иванова, 2011; Чернышова и др., 2019): существующая сеть дорог; природно-климатические условия района; таксационные характеристики древостоев; рельефные, почвенно-грунтовые и гидрологические особенности территории лесосырьевой базы; обеспеченность района местными дорожно-строительными материалами, расположение карьеров; продолжительность зимнего и летнего периодов, распределение осадков по временам года, периоды весенней и осенней распутиц и др. Это позволит проводить содержательную и практическую интерпретацию результатов моделирования.
Заключение
В настоящее время для Российской Федерации актуальной задачей является использование огромного потенциала имеющихся лесных ресурсов. При этом необходимо решить проблему их доступности, в связи с чем в любом проекте по освоению лесов на определенной территории необходимо планировать формирование экономически наиболее эффективной сети транспортных путей. Следует учитывать и долгосрочный характер инвестиций. Сложность задачи заключается в том, что для ее решения требуется прорабатывать множество возможных вариантов, при этом оперировать большим набором разнообразных параметров, а также прогнозировать изменение системы во времени. Авторами развивается направление научных исследований по разработке методологии создания агент-ориентированных моделей, обеспечивающих поддержку принятия решений по формированию эффективной территориальной сети лесных дорог. Представленное исследование посвящено устранению существующего пробела в использовании единой концепции формализации предметной области, наблюдаемого при создании подобных моделей. Полученные результаты позволят сформировать цельный механизм создания агент-ориентированных моделей, обеспечивающий последовательный и полный цикл этапов, начиная с анализа предметной области и заканчивая практической реализацией и использованием моделей. Они имеют практическую значимость с точки зрения интерпретации разработанной концепции построения агент-ориентированных моделей формирования инфраструктуры лесозаготовки и подтверждения возможности построения с его помощью моделей реальных систем, обеспечивающих их оценку и принятие решений по развитию.
Таким образом, работа вносит вклад в развитие теоретических и прикладных аспектов создания агент-ориентированных моделей формирования эффективно функционирующей территориальной сети лесных дорог.
Список литературы Проблемы агент-ориентированного моделирования формирования эффективной территориальной сети лесных дорог
- Афоничев Д.Н., Данилов А.Д., Петровский В.С. (2014). Математическое обеспечение системы автоматизированного проектирования объектов производственно-транспортной инфраструктуры лесопромышленного комплекса // Лесотехнический журнал. Т. 4. № 1 (13). С. 75–80.
- Васильев О.И., Корныльева Ю.А. (2015). Имитационное моделирование систем управления объектами лесной инфраструктуры // Лесотехнический журнал. Т. 5. № 2 (18). С. 177–187.
- Герасимов Ю.Ю., Карвинен С., Сюнёв В.С., Соколов А.П., Катаров В.К. (2009). Развитие транспортной инфраструктуры лесной отрасли – опыт Финляндии // Транспортное дело России. № 7. С. 99–102.
- Герасимов Ю.Ю., Соколов А.П., Катаров В.К. (2011). Разработка системы оптимального проектирования сети лесовозных автомобильных дорог // Информационные технологии. № 1 (68). С. 39–43.
- Гладков Е.Г. (2005). Модель территориальной динамики лесозаготовительного предприятия // Лесной журнал. № 1–2. С. 47–53.
- Гребенюк А.Л., Гарус И.А (2014). Проблема доступности лесных ресурсов // Актуальные проблемы лесного комплекса: сб. науч. трудов по итогам междунар. науч.-техн. конференции. Брянск: БГИТА. Вып. 39. С. 3–4.
- Гулин К.А., Антонов М.Б. (2017). Теоретические аспекты агент-ориентированного моделирования развития лесного комплекса // Экономические и социальные перемены: факты, тенденции, прогноз. Т. 10. № 6. С. 59–74. DOI: 10.15838/esc.2017.6.54.4
- Дианов С.В. (2020). Задача оптимального пространственного размещения сервисов для систем с мобильными пользователями // Интеллектуально-информационные технологии и интеллектуальный бизнес (ИНФОС-2020): мат-лы XI заочной междунар. науч.-техн. конференции, Вологда, 29–30 июня 2020 года. Вологда: Вологодский государственный университет. С. 53–55.
- Иванова М.Э. (2011). Исследование и планирование развития лесной транспортной сети // Лесной вестник. № 3. С. 91–97.
- Ильин Б.А. (1987). Основы размещения лесовозных дорог в сырьевых базах лесозаготовительных предприятий. Л.: ЛТА. 63 с.
- Комаров К.А., Фомина В.Ю., Герасимова М.М., Мохирев А.П. (2019). Оптимизация маршрутов доставки древесины на основе нечеткой динамической транспортной сети // Инновации в химико-лесном комплексе: тенденции и перспективы развития: мат-лы Всерос. науч.-практ. конф. с междунар. участием, Красноярск, 25–26 апреля 2018 года / отв. ред. Ю.А. Безруких, Е.В. Мельникова. Красноярск: Сибирский государственный университет науки и технологий имени академика М.Ф. Решетнева. С. 205–210.
- Курьянов В.К., Морковин В.А. (2009). Обеспечение эффективности освоения экономически доступных лесных ресурсов посредством дорожного строительства в условиях реформирования лесного законодательства // Вестник Тамбовского университета. Серия: Гуманитарные науки. № 1. С. 330–333.
- Макаров В.Л., Бахтизин А.Р., Сушко Е.Д., Сушко Г.Б. (2019). Агент-ориентированная суперкомпьютерная демографическая модель России: анализ апробации // Экономические и социальные перемены: факты, тенденции, прогноз. 2019. Т. 12. № 6. С. 74–90. DOI: 10.15838/esc.2019.6.66.4
- Мохирев А.П., Герасимова М.М., Медведев С.О. (2018). Нахождение маршрута минимальной стоимости транспортного пути при доставке древесины с лесосеки // Вестник СГУГиТ. Т. 23. № 4. С. 249–261.
- Мохирев А.П., Позднякова М.О., Гудень Т.С., Сухинин В.Д. (2019). Влияние природно-производственных факторов на транспортные затраты лесозаготовительного производства // Лесотехнический журнал. Т. 9. № 2 (34). С. 107–117.
- Мохирев А.П., Позднякова М.О., Резинкин С.Ю., Мамматов В.О. (2017). Оценка доступности лесных ресурсов с использованием современных методик на базе географических информационно- аналитических систем // Лесотехнический журнал. № 4. С. 109–122.
- Мохирев А.П., Рукомойников К.П. (2022). Моделирование структуры лесотранспортных потоков. Йошкар-Ола: Поволжский государственный технологический университет. 396 с.
- Никитин В.В., Козлов В.Г., Арутюнян А.Ю., Умаров М.М. (2016). Имитационная модель функционирования лесовозной автомобильной дороги // Вестник Московского государственного университета леса – Лесной вестник. Т. 20. № 2. С. 167–172.
- Починков С.В. (2000). Рыночная модель лесопользования: экономические аспекты // Лесное хозяйство. № 1. С. 18–24.
- Россошанская Е.А. (2019). Комплексная агент-ориентированная модель воспроизводства трудового потенциала муниципального образования // Экономические и социальные перемены: факты, тенденции, прогноз. Т. 12. № 1. С. 124–137. DOI: 10.15838/esc.2019.1.61
- Рукомойников К.П., Мохирев А.П., Медведев С.О., Дербенева Е.Ю. (2020). Отдельные особенности имитационного моделирования технологического процесса вывозки древесины // Наука и бизнес: пути развития. № 10 (112). С. 104–107.
- Соколов А.П., Осипов Е.В. (2017). Имитационное моделирование производственного процесса заготовки древесины с помощью сетей Петри // Лесотехнический журнал. Т. 7. № 3 (27). С. 307–314.
- Суханов Ю.В., Селиверстов А.А., Соколов А.П., Перский С.Н. (2012). Имитационное моделирование операций трелевки форвардером: алгоритмы и реализация // Труды лесоинженерного факультета ПетрГУ. Т. 9. № 1. С. 58–61.
- Третьяков А.Г. (2019). Моделирование структуры и объемов производства лесного сектора в лесном планировании // Экономические науки. № 181. С. 336–342. DOI: 10.14451/1.181.336
- Чернышова Е.В., Скрыпников А.В., Самцов В.В., Абасов М.А. (2019). Лесовозные автомобильные дороги в транспортной сети лесопромышленного предприятия // Лесной журнал. № 2. С. 95–101. (Изв. высш. учеб. заведений). DOI: 10.17238/issn0536-1036.2019.2.95
- Якушева Т.В., Борозна А.А., Ветров Л.С., Насковец М.Т. (2014). Экологический, экономический и социальный аспекты в развитии лесной транспортной инфраструктуры // Труды БГТУ. Лесная и деревообрабатывающая промышленность. № 2 (166). С. 63–65.
- Arifin S.M.N., Madey G.R. (2015). Verification, validation, and replication methods for agent-based modeling and simulation: Lessons learned the hard way! In: Yilmaz L. (Ed.). Concepts and Methodologies for Modeling and Simulation. Simulation Foundations, Methods and Applications. Available at: https://doi.org/10.1007/978-3-319-15096-3_10
- Bellman R. (1958). On a routing problem. Quarterly of Applied Mathematics, 16, 87–90. DOI: 10.1090/qam/102435
- Dijkstra E.W. (1959). A note on two problems in connection with graphs. Numerische Mathematik, 1, 269–271.
- Fitzpatrick B.G. (2018). Issues in reproducible simulation research. Bull Math Biol. Available at: https://doi.org/10.1007/s11538-018-0496-1
- Floyd R.W. (1962). Algorithm 97 – shortest path. Comm. of ACM, 5, 345.
- Janssen M.A. (2017). The practice of archiving model code of agent-based models. J Artif Soc Social Simul. Available at: https://doi.org/10.18564/jasss.3317
- Holm S., Hilty L.M., Lemm R., Thees O. (2018). Empirical validation of an agent-based model of wood markets in Switzerland. PLoS ONE, 13(1): e0190605. Available at: https://doi.org/10.1371/journal.pone.0190605
- Huff E.S., Leahy J.E., Hiebeler D. et al. (2015). An agent-based model of private woodland owner management behavior using social interactions, information flow, and peer-to-peer networks. PLoS ONE, 10(11): e0142453. Available at: https://doi.org/10.1371/journal.pone.0142453
- Kumar A., Kaur M. (2010). A fuzzy linear programming approach to solve fuzzy maximal flow problems. International Journal of Physical and Mathematical Sciences, 1(1), 6–12.
- Lim E.W.C. (2012). Discrete Event Simulations: Development and Applications. Rijeka: InTech. Mokhirev A., Gerasimova M., Pozdnyakova M. (2019). Finding the optimal route of wood transportation. IOP Conference Series: Earth and Environmental Science, 226, conference 1, 1–7. DOI: 10.1088/1755-1315/226/1/012053
- Moore E.F. (1959). The shortest path through a maze. In: Proceedings of an International Symposium on the Theory of Switching, Aptil 2–5, 1957, Part II. Cambridge, MA: Harvard University Press.
- Shegelman I.R. (2001). Analysis of end-to-end processes of harvesting tree biomass and its processing into wood chips. In: Current Issues of Timber Industry Development: Scientific Works. Petrozavodsk: Karel’skaya regional’naya inzhenernaya akademiya Publ.
- Scholz J., Breitwieser F., Mandl P. (2017). Modelling a dynamic forest fuelmarket focusing on wood chips: A spatial agent-based approach to simulate competition among heating plants in the Province of Carinthia, Austria. GI_Forum, 5(1), 383–396. Available at: https://doi.org/10.1553/giscience2017_01_s383
- Scholz J., Breitwieser F., Mandl P. (2021). Simulating the forest fuel market as a socio-ecological system with spatial agent-based methods: A case study in Carinthia, Austria. Natural Resource Modeling. Available at: https://doi.org/10.1111/nrm.12291
- Shegelman I.R., Shchegoleva L.V., Ponomarev A.Yu. (2005). Mathematical model of the choice of through flows of procurement, transportation and processing of wood raw materials. Izvestia Sankt-Peterburgskoj Lesotekhnicheskoj Akademii=News of the Saint Petersburg State Forest Technical Academy, 172, 32–37.
- Sotnik G., Cassell B.A., Duveneck M.J., Scheller R.M. (2021). A new agent-based model provides insight into assumptions in modeling forest management under deep uncertainty. Landscape Ecology, 37, 1251–1269. Available at: https://doi.org/10.1007/s10980-021-01324-5
- Zupko R., Rouleau M. (2019). ForestSim: Spatially explicit agent-based modeling of non-industrial forest owner policies. SoftwareX, 9, 117–125. Available at: https://doi.org/10.1016/j.softx.2019.01.008
