Проектирование алгоритмов прогнозирования технического состояния электромеханических приводов

Автор: Вересников Г.С., Серебровская Е.А., Скрябин А.В.
Журнал: Онтология проектирования @ontology-of-designing
Рубрика: Методы и технологии принятия решений
Статья в выпуске: 1 (59) т.16, 2026 года.
Бесплатный доступ
Прогнозирование технического состояния электромеханических приводов обусловлена необходимостью своевременного обнаружения неисправностей, развитие которых может привести к происшествию или невозможности выполнения функционального назначения объекта. Предлагается методика проектирования алгоритмов прогнозирования технического состояния электромеханических приводов, объединяющая методы математическое моделирование электромеханического привода, основанные на регрессионном, спектральном и корреляционном анализах. Новизна работы заключается в адаптации и интеграции существующих методов обработки стационарных сигналов, учитывающих специфику объектов диагностики, которые включают взаимодействующие электрическую и механическую подсистемы. Представленные результаты получены на основе данных, сформированных с использованием разработанной математической модели, позволяющей учитывать типовые неисправности механической природы. Для повышения точности трендовых моделей в работе выделены диагностические признаки. Установлены зависимости между ними и параметрами, позволяющими описать степень развития деградаций, характеризующих расходование технического ресурса привода. В качестве целевых функций приняты точность прогноза параметров технического состояния и сложность моделей отклика, определяемая количеством используемых диагностических признаков. Приведѐн пример проектирования и применения алгоритма прогнозирования неисправностей электромеханического привода беспилотного летательного аппарата самолѐтного типа, связанных с изменением люфта, вязкого и сухого трений.
Диагностика, прогнозирование, электромеханический привод, летательный аппарат, диагностические признаки, техническое состояние
Короткий адрес: https://sciup.org/170211642
IDR: 170211642 | УДК: 618.518.5. | DOI: 10.18287/2223-9537-2026-16-1-152-163
Design of algorithms for predicting the technical condition of electromechanical drives
Forecasting the technical condition of electromechanical drives requires the timely detection of faults whose progression may lead to accidents or the inability of a system to fulfill its intended function. This paper proposes a methodology for designing algorithms to predict the technical condition of electromechanical drives, integrating mathematical modeling techniques with regression, spectral, and correlation analyses. The novelty of this work lies in the adaptation and integration of established stationary signal processing methods, tailored to the specific characteristics of diagnostic objects comprising interacting electrical and mechanical subsystems. The presented results are based on data generated using a developed mathematical model that accounts for typical mechanical faults. To improve the accuracy of trendbased models, diagnostic features were identified and extracted. Relationships were established between these features and parameters describing the degree of degradation associated with the consumption of the drive's service life. Forecast accuracy of technical condition parameters and model complexity, defined by the number of diagnostic features employed, were adopted as objective functions. An example is provided illustrating the design and application of a fault prediction algorithm for the electromechanical drive of a fixed-wing unmanned aerial vehicle, addressing faults associated with variations in backlash, viscous friction, and dry friction.
Текст научной статьи Проектирование алгоритмов прогнозирования технического состояния электромеханических приводов
Исследования, направленные на разработку алгоритмов прогнозирования технического состояния (ТС) электромеханических приводов (ЭМП), имеют практическую значимость для обеспечения безопасности, например, беспилотных летательных аппаратов (БПЛА), которые широко применяются в задачах доставки грузов, мониторинга окружающей среды, контроля строительных процессов, управления транспортными потоками и др. [1-3]. ТС – это состояние объекта, которое характеризуется в определённый момент времени, при определённых условиях внешней среды, значениями параметров, установленных технической документацией на объект [4]. Для проектирования алгоритмов, позволяющих экстраполировать ретро- спективные данные и выполнять раннюю диагностику контролируемого объекта, в данной статье предложена методика, в которой сочетаются процедуры формализации закономерностей, описывающих развитие типовых неисправностей ЭМП. Эти закономерности являются основой оценки ожидаемого ТС ЭМП в будущие периоды времени, что даёт возможность своевременно принять меры для предотвращения отказных ситуаций.
При моделировании, ресурсных испытаниях и эксплуатации ЭМП накапливаются значительные объёмы данных, которые могут использоваться при создании алгоритмов, агрегирующих эмпирическую информацию для построения систем ранней диагностики [5]. Такие системы способствуют обеспечению безотказной работы контролируемого объекта на основе регулярного мониторинга, автоматизированного обнаружения и прогнозирования развития неисправностей [6]. В настоящее время наблюдается интерес к интеллектуальным технологиям, обеспечивающим универсальность и гибкость при решении задач технической диагностики [7, 8]. В ряде исследований [9, 10] для поддержки принятия эксплуатационных решений в условиях неполной информации предлагается использовать аппарат нечёткой логики.
При разработке алгоритмов технической диагностики на основе поиска закономерностей в данных в большинстве работ рассматриваются методы, которые можно разделить на две категории: статистический анализ и машинное обучение [11, 12]. С использованием этих методов формализуются и решаются задачи выявления аномалий, классификации и прогнозирования. В задачах выявления аномалий [13] и классификации [14] строятся модели, которые позволяют определить метку класса, характеризующую текущее ТС контролируемого объекта. Формирование диагностической информации о развитии деградаций не рассматривается, что ограничивает информативность диагностики и не позволяет выявлять негативные процессы, пока не будут выполнены условия отнесения актуального вектора значений контролируемых сигналов к ТС, отличающемуся от нормального или принадлежащему к одному из заранее описанных классов неисправностей.
В задачах прогнозирования [15] создаются модели для ретроспективного анализа, предназначенные для обнаружения тенденций в эксплуатационных данных на заданном временном интервале. Эффективность подобных моделей определяется выбором предикторов – диагностических признаков (ДП), пригодных для экстраполяции оценки ТС контролируемого объекта. Для формирования предикторов целесообразно применение методов извлечения [16] и отбора признаков [17], которые позволяют уменьшить размерность обрабатываемых данных и повысить точность прогноза посредством исключения из анализа недостаточно содержательной или избыточной информации.
При статистическом подходе к прогнозированию ТС контролируемых объектов могут использоваться регрессионные и авторегрессионные модели [18-20]. Высокую эффективность показывает множественная регрессия, которая позволяет учитывать множество разнородных признаков и оценивать влияние каждого предиктора на точность прогноза [21].
Значительное внимание в исследованиях уделяется применению в технической диагностике методов машинного обучения, таких как деревья решений и нейронные сети. Деревья решений представляют собой иерархические структуры, где каждое решение основано на последовательной обработке значений отдельных признаков, что делает их полезными при работе с категориальными данными и при построении интерпретируемых моделей [22, 23]. Деревья решений дают возможность компактно описывать закономерности с использованием набора правил, упрощающих анализ сложных данных. Нейронные сети способны выявлять более сложные зависимости и применяются в задачах с большим объёмом эмпирической информации, но при этом трудно интерпретируемы [24, 25].
В предыдущей работе авторов решалась ограниченная задача выделения признаков для прогнозирования технического состояния электромеханических систем на основе только од- ного сценария развития неисправности без возможности определения степени (стадии) деградации [26]. В данной статье для проектирования алгоритмов диагностики ЭМП рассматривается интеграция регрессионных моделей отклика для оценки параметров, определяющих ТС ЭМП (далее параметры ТС), и методов построения трендовых моделей.
1 Методика проектирования алгоритмов
Методика проектирования алгоритмов прогнозирования ТС, выполняющих анализ ретроспективных данных, состоит из следующих этапов:
-
1) формирование обучающего набора данных;
-
2) извлечение и отбор ДП, построение модели отклика по каждому параметру ТС;
-
3) интеграция моделей отклика с методами построения трендовых моделей.
Целью проектирования является обеспечение точности прогноза параметров ТС при малом количестве используемых ДП.
На первом этапе применяется математическая модель ЭМП для отработки в рамках множества сеансов моделирования стационарного управляющего сигнала с заданными амплитудой и частотой. ТС привода определяются комбинациями значений, не наблюдаемых при мониторинге параметров ТС, в частности люфта (Л), сухого трения (СТ), вязкого трения (ВТ). В результате моделирования формируются временные ряды из значений контролируемых сигналов.
Каждая комбинация значений параметров ТС является точкой расчётной сетки, сгенерированной с использованием полного факторного эксперимента. Пример исходной информации для создания расчётной сетки приведён в таблице 1. В соответствии с таблицей 1 формируется 230400 точек (возможные сочетания трёх параметров при указанных диапазонах изменения и дискретных шагах).
Таблица 1 – Формирование расчётной сетки при планировании сеансов моделирования (пример)
|
№ |
Параметр |
Размерность |
Минимальное значение |
Шаг |
Количество шагов |
Максимальное значение |
|
1 |
Люфт |
º |
0,2 |
0,04 |
64 |
2,72 |
|
2 |
Сухое трение |
Нм |
0,36 |
0,03 |
60 |
2,13 |
|
3 |
Вязкое трение |
Нм/об/мин |
0,001 |
0,001 |
60 |
0,06 |
Амплитуда и частота управляющего сигнала, длительность одного сеанса моделирования при фиксированных значениях параметров ТС, частота съёма данных выбираются таким образом, чтобы обеспечить применение методов частотного анализа (например, амплитуда сигнала 40°, частота 1 Гц, длительность сеанса 3 секунды, съём данных 100 значений в секунду с постоянным шагом). Результатом одного сеанса моделирования при использовании математической модели [27] является 10 временных рядов, которые соответствуют контролируемым сигналам (входной сигнал, поворот ротора двигателя, положение выходного вала, управляющее напряжение, ток питания, мощность электропитания, скорость вращения вала ротора, момент на валу ротора, механическая мощность на валу ротора, скорость вращения выходного вала). На рисунке 1 представлена схема формирования обучающего набора данных для построения моделей отклика. Согласно приведённой схеме каждой совокупности временных рядов, полученной в рамках одного сеанса моделирования, ставится в соответствие изначально заданная комбинация значений параметров ТС ЭМП.
На втором этапе производится извлечение и отбор ДП и построение моделей отклика (см. рисунок 2). Извлечение признаков выполняется с использованием методов спектрального анализа [28], в частности быстрого преобразования Фурье. Предварительный отбор при- знаков выполняется с использованием методов корреляционного анализа [29]. Использование быстрого преобразования Фурье позволяет выполнять поиск ДП во временном и частотном диапазонах. Корреляционный анализ даёт возможность с низкими вычислительными затратами определить и исключить признаки, несущие недостаточную и/или избыточную информацию. Среди всех моментов времени и спектральных отсчётов по всем контролируемым сигналам выделяется ограниченное количество признаков (например, 10-20 признаков), составляющих входной вектор модели отклика. При построении для параметров ТС моделей отклика, описывающих относительно простые закономерности в данных, достаточно использовать методы регрессионного анализа и на основе элементарных математических функций сформировать уравнения с коэффициентами регрессии, оцениваемыми методом наименьших квадратов. Для проверки качества моделей отклика применяются статистические метрики, например, коэффициент детерминации R2 или средняя абсолютная ошибка (САО).
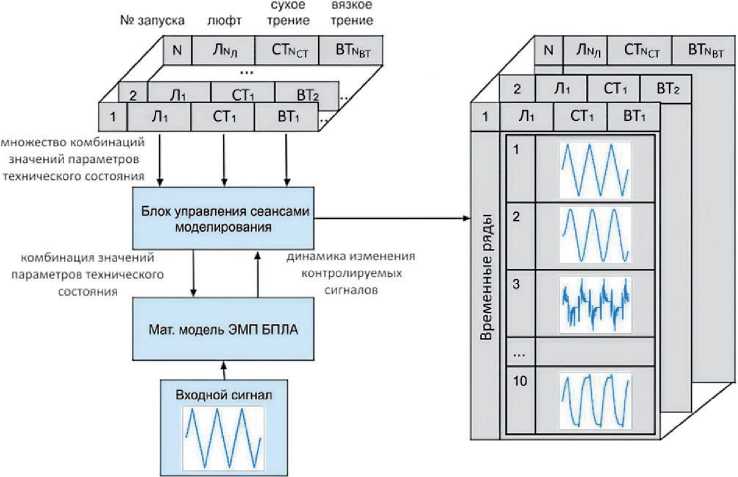
Рисунок 1 – Схема формирования обучающего набора данных

Рисунок 2 – Схема формирования признакового пространства и построения моделей отклика
На основе анализа значений коэффициентов регрессии, характеризующих степень влияния отдельных ДП на параметры ТС, и статистических метрик уточняется признаковое пространство и сложность уравнений (см. рисунок 3).
Обработка данных с использованием схем, представленных на рисунках 2 и 3, позволяет снизить вычислительные затраты на формирование качественного признакового пространства, так как исключается необходимость применения метода полного перебора.
На третьем этапе созданные модели отклика интегрируются с методами построения трендовых моделей (см. рисунок 4). Результатом применения моделей отклика к ретроспективным последовательностям входных векторов, включающих ДП, являются временные ряды для параметров ТС, которые экстраполируются на основе трендовых моделей. Результаты экстраполяции используются для создания диагностической информации. Таким образом, формируется проект единого алгоритма прогнозирования ТС ЭМП, который может быть реализован на языках программирования со специализированными математическими библиотеками.
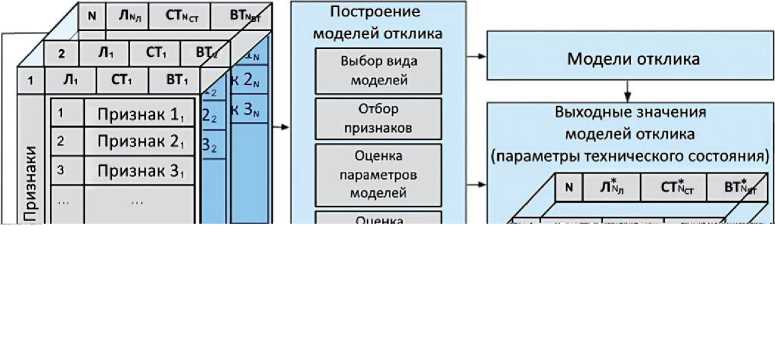
Рисунок 3 – Схема уточнения признакового пространства
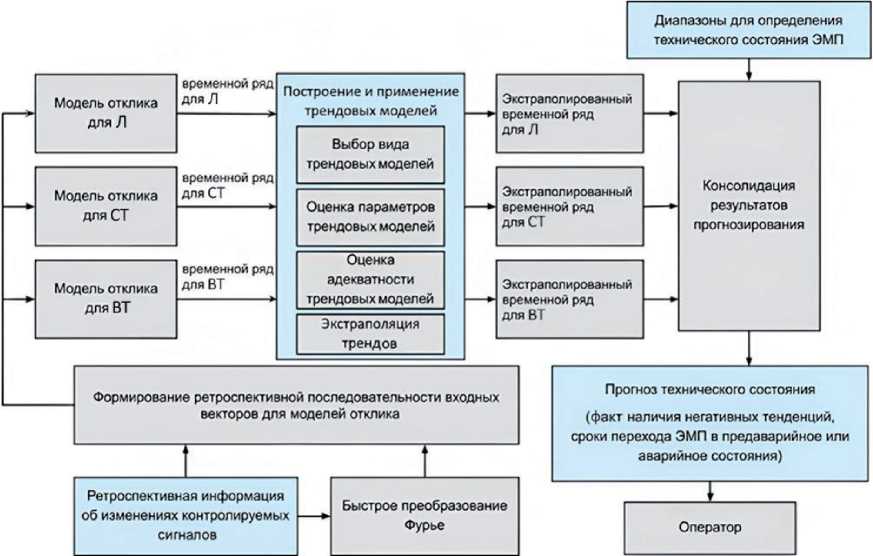
Рисунок 4 – Схема алгоритма прогнозирования технического состояния электромеханических приводов
На рисунке 5 приведены примеры экстраполяции на основе трендовых моделей для параметров ТС (сухое трение и люфт), которые изменяются от минимальных до максимальных значений согласно таблице 1 и соответствуют типу ЭМП (с прямозубым редуктором), применяющемуся в БПЛА самолётного типа. Действительные значения и выходные значения моделей отклика практически совпадают (сплошные линии), десятью точками показан результат прогноза (количество точек соответствует заданному горизонту прогнозирования). Каждый прогноз построен на основе 50 упорядоченных во времени значений, полученных от соответствующей модели отклика. Для анализа качества трендовых моделей используется коэффициент детерминации R 2 , для оценки точности прогнозирования применяются метрики: среднеквадратическая ошибка (СКО) и средняя абсолютная процентная ошибка (САПО).
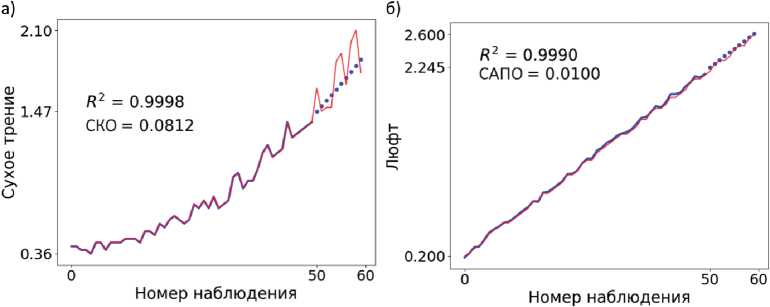
Рисунок 5 – Примеры применения трендовых моделей для прогнозирования сухого трения (а) и люфта (б)
В целях формирования диагностической информации о контролируемом объекте на основе вычисленных и экстраполированных выходных значений моделей отклика определяются классы ТС в соответствии с заданными экспертами диапазонами значений параметров ТС (пример показан в таблице 2), что позволяет выработать сообщения о возможном переходе ЭМП в предаварийное или аварийное состояния.
Таблица 2 – Классификация технических состояний электромеханических приводов
|
Состояние |
Люфт, º |
Сухое трение, Нм |
Вязкое трение, Нм/об/мин |
|
Исправное |
От 0,25 до 0,52 |
От 0,36 До 0,51 |
Более 0,05 |
|
Предаварийное |
От 0,56 до 1,32 |
От 0,54 до 1,34 |
От 0,011 до 0,0499 |
|
Аварийное |
Более 1,36 |
Более 1,38 |
Менее 0,01 |
На основе предложенной методики и математической модели ЭМП [27] разработан алгоритм прогнозирования ТС ЭМП БПЛА самолётного типа. В моделях отклика для сухого трения и люфта использованы ДП, отражающие значения контролируемых сигналов в моменты времени, найденные в результате применения схем, представленных на рисунках 2 и 3. Для вязкого трения высокая точность модели отклика была достигнута при добавлении признаков, которые вычислены в результате применения быстрого преобразования Фурье.
2 Результаты тестовых расчётов
Для комплексной оценки точности созданного алгоритма сформированы тестовые данные, содержащие ретроспективные последовательности наборов временных рядов и сопоставленные им комбинации значений технических параметров. Каждая последовательность соответствовала линейному, квадратичному или экспоненциальному закону изменения одного из параметров ТС (два других параметра принимали значения, соответствующие нормаль- ному ТС), что обеспечивало моделирование процессов перехода ЭМП в предаварийное или аварийное состояние. Количество наборов в одной последовательности варьировалось от 40 до 60, горизонт прогнозирования составлял от 5 до 20 моментов времени. Для исследования устойчивости прогноза к шуму в данных во временные ряды контролируемых сигналов добавлялись локальные выбросы и осцилляции. В итоге создано 3500 ретроспективных последовательностей по каждому параметру ТС.
Для всех ретроспективных последовательностей, которые участвовали в расчётах, ошибка САПО не превышала 2.5 %. Результаты работы алгоритма прогнозирования ТС типового ЭМП (с прямозубым редуктором), который применяется в БПЛА самолётного типа, визуализированы для организации поддержки принятия эксплуатационных решений (см. рисунки 6 и 7). В каждом приведённом примере горизонт прогнозирования составляет семь моментов времени. Прогноз строится на основе 53 упорядоченных во времени значений, полученных от модели отклика для вязкого трения.
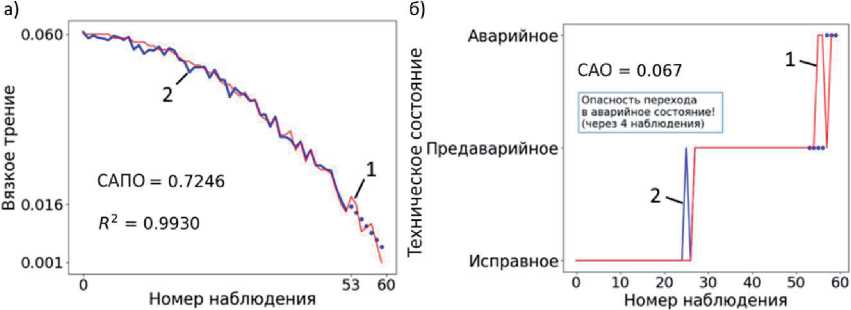
Рисунок 6 – Пример прогнозирования перехода электромеханических приводов из предаварийного в аварийное состояние, связанное с изменением вязкого трения (1 - действительные значения, 2 - по модели отклика)
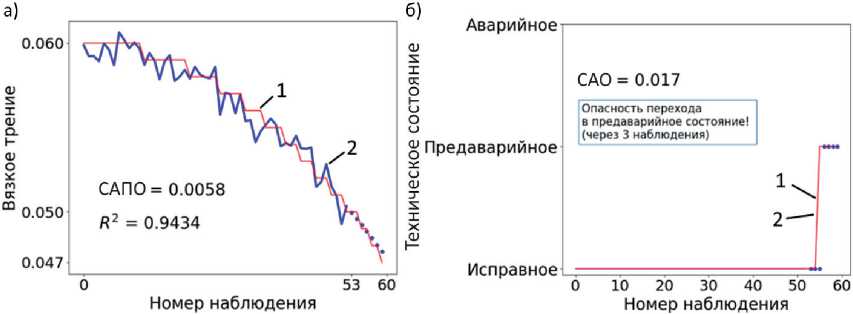
Рисунок 7 – Пример прогнозирования перехода электромеханических приводов из нормального в предаварийное состояние, связанное с изменением вязкого трения
(1 - действительные значения, 2 - по модели отклика)
Заключение
Создана методика проектирования алгоритмов прогнозирования ТС ЭМП, позволяющих до наступления негативных последствий получить информацию о возможном переходе контролируемого объекта в предаварийное или аварийное состояние для выработки сообщений оператору системы диагностики. Результаты тестовых расчётов подтвердили адекватность разработанной методики на примере алгоритма, прогнозирующего неисправности, связанные с изменением люфта, вязкого и сухого трений. Показано, что для рассматриваемых видов неисправностей регрессионный, спектральный и корреляционный анализы позволили формализовать взаимосвязи контролируемых сигналов и параметров ТС, что обеспечило построение точных моделей отклика, предназначенных для интеграции с методами построения трендовых моделей.
