Проектирование и расчет трехкоординатной качающейся платформы с пневматическим приводом

Автор: Назаров Федор Михайлович, Форенталь Вольдемар Ионатанович, Форенталь Михаил Вольдемарович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Актуальные проблемы машиностроения
Статья в выпуске: 2-4 т.17, 2015 года.
Бесплатный доступ
В статье рассмотрен расчет трехкоординатной качающейся платформы с приводом от пневмомускулов. В квазистатическом приближении определены аналитические зависимости для вычисления сил, действующих со стороны пневмомускулов на платформу и необходимых для ее движения. Для выбранных в качестве приводов пневмомускулов получены экспериментальные зависимости сила-давление-относительное сжатие. Определены параметры аппроксимирующих зависимостей для полученных экспериментальных данных. Определены потребные давления для движения платформы по заданной траектории. Анализ результатов расчетов показал работоспособность спроектированной платформы.
Качающаяся платформа, пневматический мускул, аппроксимация, давление
Короткий адрес: https://sciup.org/148203675
IDR: 148203675 | УДК: 681.587.3
Design and calculation of the three-coordinate the shaking platform with the pneumatic drive
In article calculation of three-coordinate shaking platform with the drive from pneumomuscles is considered. In quasistatic approach analytical dependences for calculation the forces operating from pneumomuscles on a platform and necessary for its movement are defined. For the pneumomuscles chosen as drives experimental dependences force - pressure-relative compression are received. Parameters of approximating dependences for the obtained experimental data are determined. Required pressure for the platform movement on the set trajectory are determined. The analysis of calculation results showed the operability of designed platform.
Текст научной статьи Проектирование и расчет трехкоординатной качающейся платформы с пневматическим приводом
В настоящее время существует и разрабатывается достаточно большое количество аппаратуры, содержащей в себе элементы стабилизации внутренних компонент при отклонениях корпусных деталей. Разработкой таких изделий занимаются, в частности, и в нашем университете.
Цель работы: создание испытательной платформы для изделий с элементами стабилизации внутренних компонент при отклонениях корпусных деталей.
Требования к платформе следующие: качающаяся платформа со сферической опорой в центре с возможностью поворота вокруг трех ортогональных осей; максимальное угловое отклонение 5°; закон движения платформы задается; реализуемый диапазон частот до 5 Гц; диаметр платформы не менее 150 мм; масса испытываемого объекта до 1 кг; отсутствие электромагнитных помех в зоне платформы; минимальные габариты, вес и цена.
Анализ возможных приводов показал, что для данной задачи наиболее рациональными по цене будут электроприводы или пневмоприводы, поскольку следящий гидравлический привод значительно дороже. Силовые электроприводы
характеризуются достаточно сильным электромагнитным излучением при работе, поэтому для защиты от электромагнитных помех их применение возможно только при установке на некотором расстоянии через систему тяг, что значительно увеличит габариты конструкции платформы. Поэтому было решено реализовать платформу на пневматических приводах, поскольку данные приводы позволяют разнести в пространстве исполнительные механизмы и электронную систему управления.
Обзор пневматических приводов показал, что в настоящее время достаточно эффективно в следящих пневматических системах с небольшими перемещениями в качестве исполнительных механизмов используются пневматические мускулы [1, 7]. Перед пневматическими цилиндрами они обладают несколькими преимуществами: отсутствием силы трения и высокими усилиями при тех же габаритах [2]. Однако пневмомускулы характеризуются наличием гистерезиса по перемещению при росте и уменьшении давления или нагрузки, что приводит к необходимости формирования системы обратной связи по положению. Существующие системы с приводом на пневмомускулах позволяют реализовывать частоты движения до 20-25 Гц [12]. Данный факт позволяет на первом этапе проектирования рассчитывать проектируемую платформу по статическим параметрам.
Конструктивно платформу с приводами было решено выполнить в виде диска, шарнирно закрепленного в центре, с возможностью отклонения от горизонтали и поворота относительно исходного положения на угол ±5º. Для уменьшения количества приводов в конструкции решено применить только 3 привода в виде пневмомускулов, задействованных в антагонистической паре с пружинами растяжения, возвращающими платформу в начальное положение при отсутствии давления в пневмомускуле. Центр платформы закреплен на сферическом шарнире, обеспечивающем свободу наклона платформы в вертикальных плоскостях и поворот вокруг вертикальной оси. При свободном состоянии пневмомускула, т.е. отсутствии давления воздуха в нем, платформа будет находиться в крайнем наклоненном состоянии и повернутой вокруг вертикальной оси на некоторый угол. Кинематическая схема проектируемой конструкции представлена на рис. 1.
1S»l - R
I «„I- R
< g(t) • f(t) = 0
f(t) • J > R • cos (a max )
g (t) • I > R • cos ( a MAX )
где R - радиус точек А и С от точки О, axlvx -максимальный угол отклонения (auvx = 5 ° ), i, j – орты осей ox и oy .
Векторы усилий приводов FM1 , FM2 , FM3 определяются следующим выражением:
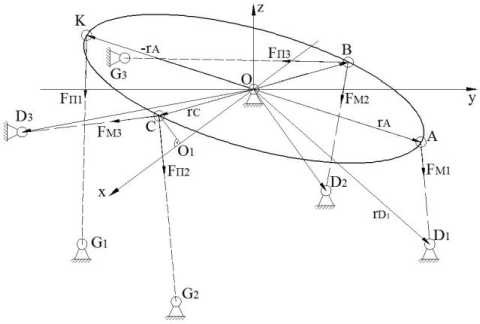
Рис. 1. Кинематическая схема платформы:
AD1 – пневмомускул 1 ; BD2 – пневмомускул 2 ; СD3 – пневмомускул 3 ; KG1 – пружина 1 ; CG2 – пружина 2 ; BG 3 – пружина 3 ; D 1 , D 2 , D 3 ,– точки крепления неподвижной части привода; А, В, С – точки крепления пневмомускулов к платформе; G 1 , G 2 , G 3 – точки крепления пружин к основанию; K, C, B – точки крепления пружин к платформе
При подаче сжатого воздуха пневмомускулы сокращаются, вызывая поворот и наклон платформы, вращающейся на сферической опоре вокруг центра О. Так как пнемомускулы нетерпимы к зажимам и перекосам и способны безаварийно работать только вдоль одной оси, необходимо применение шаровых опор для фиксации обоих концов привода. Без ограничения общности движение платформы может быть описано движением любых двух ее точек, не лежащих на одном диаметре. В решаемой задаче удобным является задание законов движения точек А и С:
r A = f(t) , r C = g(t) , (1)
где f(t) , g(t) – произвольные функции параметра t, удовлетворяющие следующим условиям:
<
r D1 — r A
| rD1 — r A |
F =
M1
F =
M2
F =
M3
•F
M1
F
M2
| rD2 + rC rD2 + rC
r D3 r C
| rD3 - r C|
F
M3
где rD1 , rA , rD2 , rC , rD3 , rC – радиус векторы соответствующих точек (рисунок 1) относительно точки O.
Аналогично записываются векторы усилий, создаваемые пружинами F , F , F :
FП1
= r G1 + r A | r G1 + r A
■ c ПР • ( |r G1 + Га| L 0 )
G2 C
П2 I---- —I c ПР ( |rG2 r C 0
|rG2 - r C
F
П3
= r G3 + r C | rG3 + r C
• c ПР • ( |r G3 + r c| L 0 )
где r , r , r – радиус векторы соответствующих точек (рисунок 1) относительно начала координат; c – жесткость пружины; L – начальная длина пружины.
Статическое равновесие платформы соответствует равенству нулю главного момента системы:
M = r A X FM1 - r N X FM2 + r C X FM3 - r A X F I 1 + r N X FI 2 - r C X FI 3 = 0 (5)
Умножая векторное уравнение (5) скаляр-но на векторы r , r , r , можно получить систему из трех линейных уравнений относительно сил в пневмомускулах.
Полученные уравнения однозначно связывают координаты точек платформы и значения сил пневматических мускулов, необходимых для получения определенных, наперед задаваемых законов движения двух точек платформы. Следующим этапом является определение требуемых давлений в пневмомускулах по известным усилиям и перемещениям точек.
Для проектируемой платформы выбраны компактные пневмомускулы DMSP-10-80N с внутренним диаметром 10 мм и длиной деформируемой части 80 мм. В доступных авторам литературных данных зависимостей усилия от укорочения и давления для пневмомускулов такой длины не найдено – большинство исследований проводилось для аналогичных моделей длинной от 200 мм [4, 10] до 1145 мм [7] при давлениях не выше 6 бар [3, 8]. В связи с этим возникла потребность экспериментального измерения характеристик этих пневмомускулов и аппроксимации этих характеристик аналитическими зависимостями. В литературе представлены несколько зависимостей, связывающих усилие пневмомускула с его укорочением и давлением в нем.
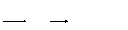
Для определения наиболее применимого в инженерных расчетах выражения было снято поле характеристик для пневматических мускулов серии DMSP-10-80N с внутренним диаметром 10 мм и длиной деформируемой части 80 мм. Снятие характеристик производилось путем последовательного нагружения вертикально расположенного пневмомускула (рис. 2) при избыточном давлении от 0 до 700 кПа с шагом 100 кПа. Результаты измерений для четырех пневмомускулов изображены на рис. 3.
Рис. 2. Схема нагружения пневматического мускула для снятия статической характеристики
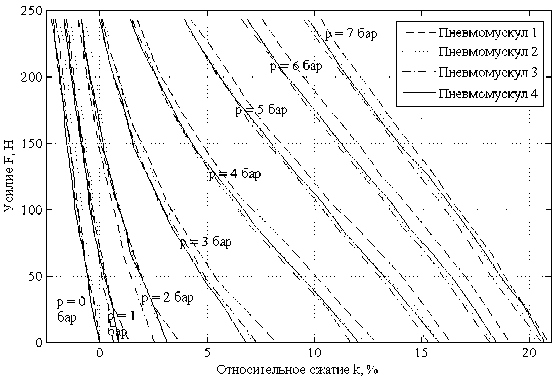
Рис. 3. Поле характеристик для четырех пневматических мускулов в диапазоне изменения давлений от 0 до 7 бар
Анализируя данные, представленные на рис. 3, можно заключить, что разброс характеристик пневмомускулов одной марки по относительному сжатию составляет до 10%. На рис. 4 показаны зависимости относительного сжатия от давления при различных усилиях для случаев повышения и понижения давления. Анализируя данные, показанные на рис. 4, можно заключить, что гистерезис по относительному сжатию составляет до 20%, по давлению до 0,5 бар.
В литературе [2] приводят выражение для зависимости силы от давления и относительного сжатия, основанное на геометрической модели структуры мускула:
F(p,k) = D o2 • p [ a - ( 1 - k ) 2 - b ] , (6)
где F – развиваемое усилие; D0 – диаметр пнев- сжатие; a и b – коэффициенты, определяемые момускула при отсутствии внешнего воздейст- геометрией мускула.
вия; p – подводимое давление; k – относительное
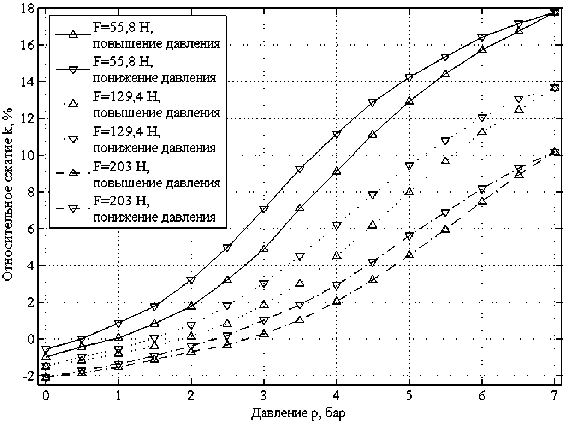
Рис. 4. Семейство петель гистерезиса при изменении давления для разных значений нагрузки
Подобные выражения для различных конструктивных исполнений пневмомускулов, отличающихся, прежде всего, геометрией укладки армирующих волокон, рассмотрены также в [8]. Однако использование выражения (6) и его аналогов на практике ограничено, поскольку оно не позволяет предсказать величину сжатия при наличии нагрузки и отсутствии давления, а также не отражает влияние ряда параметров, таких, например, как тип и толщина применяемого полимера. Попытки ввода корректирующих эмпирических коэффициентов приводят к существенному усложнению выражения, однако, согласно исследованиям T. Szépe, оно применимо только при давлениях свыше 2 бар [10]. Со значительно большей точностью, нежели (6), экспериментальная характеристика может быть аппроксимирована выражением (7), предложенным T.Szépe [10] и использованным при исследованиях в ряде работ [9, 11]:
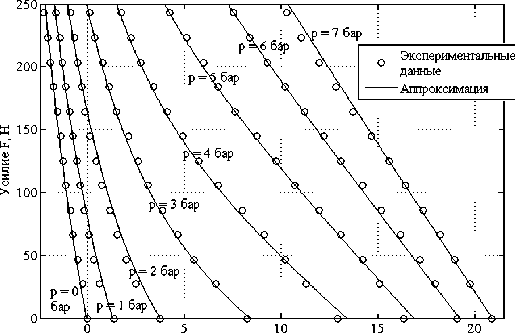
F(p,k) = (a • p+b)-exp(c • k + d) + (e • p + f )• k + g• p+h , где a, b, c, d, e, f, g, h – постоянные коэффициенты, определяемые по экспериментальным данным. Характеристика одного из пневматических мускулов и график функции 7 с коэффициентами, найденными методом наименьших квадратов, представлены на рис. 5. Значения коэффициентов сведены в табл. 1.
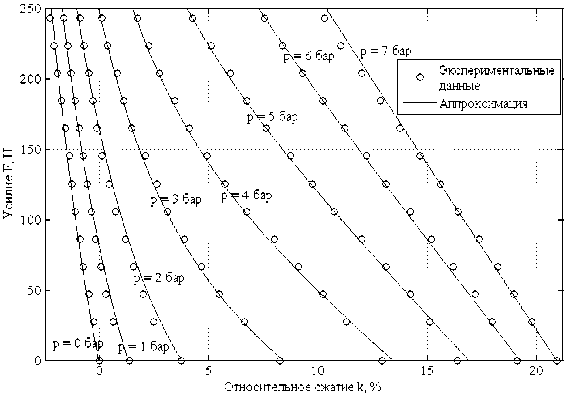
Рис. 5. Аппроксимация статической характеристики пневмомускула выражением (7)
J. Sárosi в работе [5] предлагает использовать выражение (8):
F(p,k) = ( a • p + b ) - exp ( c • k ) + d • p • k + e • p + f , (8)
где a, b, c, d, e, f, – эмпирические коэффициенты (табл. 1). На рис. 6 изображен график функции (8), наложенный поверх экспериментально замеренных точек для того же пневмомускула. Кроме (8) в работе [6] тот же автор предлагает упрощенную формулу:
F(p,k) = ( p + a )• exp (b • k) + c • p • k + d • p + e, где a, b, c, d, e, f, – коэффициенты (табл. 1). Однако, по сравнению с (7) и (8) формула (9) дает существенно большее несовпадение теоретически предсказанных усилий (особенно при малых их значениях) с фактическими величинами (рис. 7).
Количественной мерой качества аппроксимации является среднеквадратичное отклонение σ экспериментальных точек от аппроксимирующей кривой при различных давлениях; значения σ, рассчитанные для экспериментальных точек и аппроксимации по выражениям (7–9), приведены в табл. 2.
Таблица 1. Значения коэффициентов аппроксимирующих выражений
|
Коэффициент |
a |
b |
c |
d |
e |
f |
g |
h |
|
выражение (7) |
-2,40 |
27,1 |
-0,33 |
2,17 |
-3,38 |
0,25 |
104 |
-241 |
|
выражение (8) |
-20,6 |
235 |
-0,33 |
-3,34 |
104 |
-238 |
- |
- |
|
выражение (9) |
177 |
-0,42 |
-3,05 |
92,6 |
-194 |
- |
- |
- |
Таблица 2. Среднеквадратичное отклонение для различных аппроксимаций
|
Давление, бар |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
σ (7), % |
6,5 |
5,3 |
6,5 |
2,9 |
2,9 |
2,7 |
2,4 |
4,0 |
|
σ (8), % |
6,7 |
5,2 |
6,4 |
3,0 |
2,9 |
2,7 |
2,4 |
4,0 |
|
σ (9), % |
15 |
5,9 |
9,6 |
5,6 |
6,4 |
7,2 |
5,9 |
3,4 |
Относительное сжатие к, %
Рис. 6. Аппроксимация статической характеристики пневмомускула выражением (8)
Сравнивая величины отклонений функций (7) и (8), можно сделать вывод о практически одинаковой их точности. Выражение (8) компактнее и требует определения лишь 6 коэффициентов, что делает его более предпочтительным к использованию. Необходимость же поиска более точного математического описания неочевидна в силу присутствия гистерезиса и разброса характеристик между пневмомускулами. Как показано на рис. 4, при малых и средних нагрузках разница в величинах давления, необходимых для поддержания фиксированной длины мускула на циклах «выхлоп» и «нагнетание», может достигать 0,5 бар.
Экспериментально замеренное поле характеристик пневмомускула с учетом гистерезиса по нагрузке изображено на рис. 8, там же приведен график аппроксимирующей зависимости, полученной по формуле вида (8). Можно отметить, что наибольшим гистерезис оказывается при средних давлениях (около 4-5 бар). Тем не менее, данная модель позволяет определить потребные давления в пневмомускулах с точностью до 0,3 бар. При этом заданную траекторию движения контрольных точек платформы возможно осуществить за счет электропневматиче-ской системы обратной связи по перемещению.
Для проектируемой платформы конструктивно были выбраны следующие параметры: R=60 мм, расстояния KG 1 = CG 2 = BG 3 = AD 1 = BD 2 = CD 3 =100 мм при горизонтальном положении платформы, начальная длина пружин L 0 =80 мм, жесткость пружин с ПР =5 Н/мм, относительное сжатие пневмомускулов при горизонтальном положении платформы 8%.
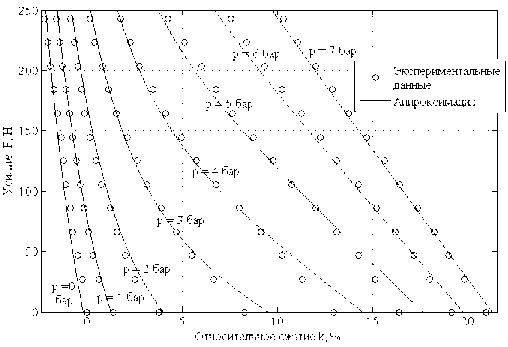
Рис. 7. Аппроксимация статической характеристики пневмомускула выражением (9)
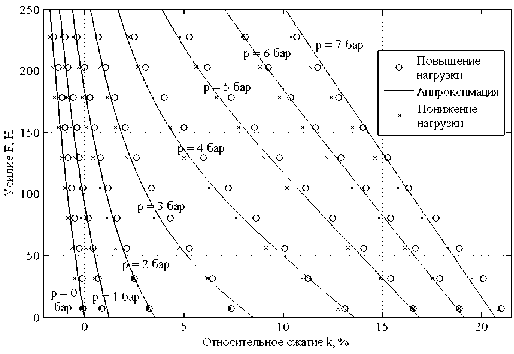
Рис. 8. Семейство экспериментальных точек, отражающих гистерезис в пневмомускуле и график аппроксимирующей функции
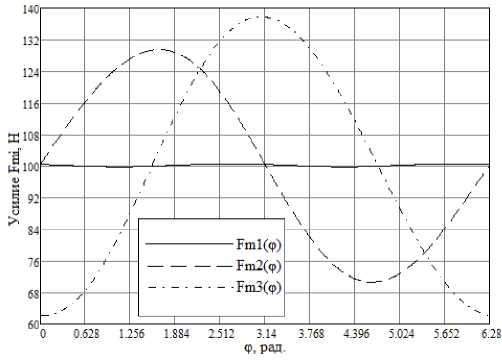
Рис. 9. Зависимость усилия в i -ом пневмомускуле от угловой координаты φ точки C
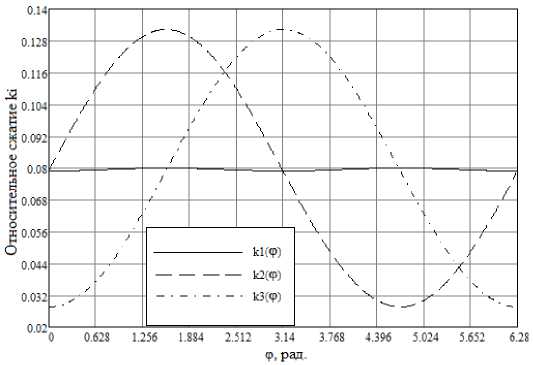
Рис. 10. Зависимость относительного сжатия i- ого пнемомускула от угловой координаты φ точки C
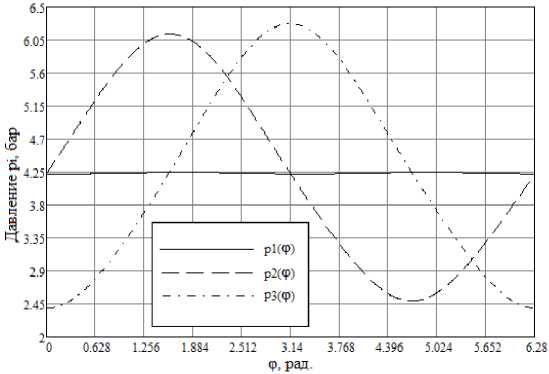
Рис. 11. Зависимость потребного давления в i- ом пневмомускуле от угловой координаты φ точки C
В качестве тестовой траектории было задано движение точки С по окружности радиусом 4 мм в плоскости, перпендикулярной оси ox , c 1. центром на этой оси. Точка A должна была оставаться в плоскости z=0. Графики полученных расчетным путем усилий пневмомускулов, их относительных сжатий и потребных давлений от 2. угла φ между вектором O 1 С и осью oy приведены на рис. 9-11. Анализируя графики, приведенные на рис. 9-11, можно заключить, что потребные давления для движения по заданной траек- 3.
тории не превышают 6,5 бар, что укладывается в рабочую зону характеристики пневмомускулов.
Выводы: платформа с выбранными геометрическими параметрами и исполнительными 4. механизмами должна быть работоспособна. В настоящее время платформа находится в изготовлении в научно-производственном институте «Учебная техника и технологии» ЮУрГУ 5. (НИУ).
Список литературы Проектирование и расчет трехкоординатной качающейся платформы с пневматическим приводом
- Колесникова, Е.Г. Гибкие приводы в робототехнике/Е.Г. Колесникова, Е.А. Савинская, В.И. Умнов//Механика и машиностроение. 2012. №1. Режим доступа: http://mvestnik.istu.irk.ru/?ru/journals/2012/01, свободный. -Загл. с экрана.
- Ferraresi, C. Flexible pneumatic actuators: a comparison between the McKibben and the straight fibres muscles/C. Ferraresi, W. Franco, A.M. Bertetto//Journal of robotics and mechatronics. 2001. Vol. 13, №1. P. 56-63.
- Iancu, A. Experimental studies regarding the behavior of a mechanical system with pneumatic muscle driven by compressed air/A. Iancu, V. Filip//The Scientific Bulletin of Valahia University. Materials and Mechanics. 2011. № 6. P. 160-167.
- Minh, T.V. Modeling torque-angle hysteresis in a pneumatic muscle manipulator/T.V. Minh et al.//2010 IEEE/ASME International Conference on advanced intelligent mechatronics. Montreal, 2010. P. 1122-1127.
- Sárosi, J. New Function Approximation for the Force Generated by Fluidic Muscle‖and/J. Sárosi, Z. Fabulya//International Journal of Engineering, Annals of Faculty of Engineering Hunedoara. 2012. Vol. 10, № 2. P. 105-110.
- Sárosi, J. Newest approach to modeling hysteresis in the Force-contraction cycle of pneumatic artificial muscle//Acta technica corviniensis. Bulletin of engineering. 2012. Vol. V. P. 63-66.
- Schindele, D. Einstatz pneumatischer Muskeln als Aktoren in der Robotik: Dissertation zur Erlangung des akademischen Grades Doktor-Ingenieur (Dr.-Ing) der Fakultät für Maschinenbau und Schiffstechnik der Universität Rostock: 23.11.2012. Universität Rostock. -Aachen: Shaker Verlag GmbH, 2013. 165 S.
- Serres, J.L. Dynamic characterization of a pneumatic muscle actuator and its application to a resistive training device: A dissertation submitted in partial fulfillment of the Requirements for the degree of Doctor of Philosophy: 10.11.2008. -Wright State University, 2008. 218 P.
- Szépe, T. Accurate force function approximation for pneumatic artificial muscles//3-rd IEEE International Symposium on Logistics and Industrial Informatics, Budapest, Hungary, 25-27 August 2011. Р. 128-132.
- Szépe, T. Matlab Models for Pneumatic Artificial Muscles/T. Szépe, J. Sárosi//Scientific Bulletin of the "Politehnica" University of Timisoara: Romania Transactions on Mechanics. 2009. P. 65-70.
- Szépe, T. Model Based Open Looped Position Control of PAM Actuator/T. Szépe, J. Sárosi//8th IEEE International Symposium on Intelligent Systems and Informatics, Subotica, Serbia, 10-11 September 2010. Р. 607-609.
- Werely, N. Pneumatic artificial muscles for aerospace applications//50th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference. 2009. Р. 502-512.
