Проективно-евклидова связность в изображении горизонтальных плоскостей

Автор: Бритов Александр Владимирович
Журнал: Инженерные технологии и системы @vestnik-mrsu
Рубрика: Геометрия
Статья в выпуске: 2, 2012 года.
Бесплатный доступ
В статье продолжается обсуждение общей теории перспективы Б. В. Раушенбаха. Показано, что проективно-евклидовы связности (сохраняющие геодезические) в изображениях горизонтальных плоскостей как при классическом центральном проектировании на картинную плоскость, так и при проектировании на сферу с последующей разверсткой в квадрат, не являются даже эквиаффинными. Рассмотрены возникающие при этом билинейные формы и линейные операторы в изображении.
Короткий адрес: https://sciup.org/14719911
IDR: 14719911 | УДК: 514.12
Текст научной статьи Проективно-евклидова связность в изображении горизонтальных плоскостей
В статье продолжается обсуждение общей теории перспективы Б. В. Раушенбаха. Показано, что проективно-евклидовы связности (сохраняющие геодезические) в изображениях горизонтальных плоскостей как при классическом центральном проектировании на картинную плоскость, так и при проектировании на сферу с последующей разверсткой в квадрат, не являются даже эквиаффинными. Рассмотрены возникающие при этом билинейные формы и линейные операторы в изображении.
Б. В. Раушенбахом экспериментально подтверждается, что зрительное восприятие пространства и плоскостей в нем существенно искажает прямые линии в кривые (в отличие от классической теории перспективы, основанной на центральном проектировании пространства на «картинную» плоскость) [3]. Эти данные позволяют выделить зоны прямой и обратной перспектив. В зоне обратной перспективы евклидова плоскость, по утверждению Б.В. Раушенбаха, изображается плоскостью Лобачевского постоянной отрицательной кривизны. Это подразумевает, что прямые — геодезические аффинно-евклидовой плоскости изображаются геодезическими в образе, что приводит к задаче привнесения, по крайней мере, аффинной связности в зрительный образ за счет проектив-ного(геодезического) отображения [2, с. 165] евклидовой плоскости. Для этого нужна полная математическая модель отображения, что мы и делаем на основе работы [1].
-
1. Общие замечания по нахождению проективно-евклидовой связности.
Рассматриваются отображения горизонтальных плоскостей z = Z 0 * 0 (абсолютно симметрично выглядят отображения вертикальных плоскостей у = у 0 * 0):
-
— на плоскость Оху (при h = 1), которое описывается формулами (ось О^ = Оу, О р = Oz):
и z .
^ = ——, П =----, х +1 > 0; (1)
х + 1 х + 1
-
— на сферу с последующим отображением проекции на квадрат О ^п , X = 1 формулами:
^ = arctg , р = arctg —, х + 1 > 0. (2) X + 1 х + 1
Системы координат Oхуz, О^, О^р — прямоугольные в Е 3 , на картинной плоскости ^ 2 и в квадрате
л
--<
Я
^ < 2
к л
,
^^^^^.
— < п < —
2 2
соответственно. Заметим, что при отображении (2) точки р = 0 отвечают бесконечно
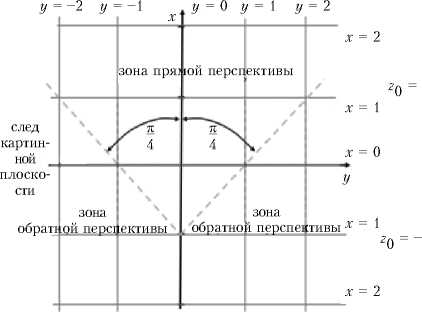
удаленным точкам горизонтальных плоскостей z = Z o (линия горизонта), а граничные точки квадрата — предельной «рамке» изображения (рис. 1).
В силу двухмерности многообразий тензор кривизны заменяется тензором Риччи:
R = RS..=3IS S
^ij ^Sij иs1 ij Ui1 Sj + s k s k
+ 1 sk 1 ij 1 ik 1 sj ■
На исходной «горизонтальной» плоскости z = z o * 0 введем координаты точки М:
х1 = х + 1 > 0, 2
_х = у.
У = -1
а) изображаемая полуплоскость
л
У = -2
У = 2
линия след картин!
У = 1
;лед картинной плоское
- 2
ой 1
■ горизонта У = О
2 = 2 о (х + 1 геодезической
> О) с координатной сетью
б) изображение полуплоскостей 2 = 1 и 2 = -1 с координатной геодезической сетью
на
плоскости О<;ц
У = О
У = 3
X =
X = у =
X = л 3 2
У = 3
У =
2 у = 1
2 = 1
2 =-1
У =
О
О
■ зона прямой перспективы
У =
У =
-1,5
линия горизонта
предельная «рамка» изображения
в) изображение полуплоскостей 2 = 1 и 2 = -1 с координатной геодезической сетью в квадрате О ^ц
Рис. 1
Прямоугольные координаты в изображении точки М:
функции — класса С2 с якобианом, отличным от нуля. Уравнения геодезических пря-
^^в
^^в
и1 = и1(х1х2),
2 2 12
и = и Ст х ).
мых с геодезическим параметром t имеют вид:
х1 = blt + x Q
При этом предполагается,
что эти
Не предлагая геодезичность параметра t за-
ранее, из уравнения геодезических линий в изображении d^u1 ь du du1 . du1
г Гц= X dt2 7 dt dt dt с учетом (6 — 7) приходим к тождествам по Ьг:
[di}uk + r1pdiusd j U р ) b*b3 = ( Х д^1 ) b1 .
Из них следует, что:
-
1. X = 0, т. е. параметр t — геодезический в изображении.
-
2. Э^ ур* + Г ^р 8^y us 6 у уи р = 0 — уравнение для нахождения коэффициентов Г 1 связности.
С учетом симметрии d ij Uk и переброса симметрирования по 1, / на s, р последние уравнения принимают вид:
д;м1 + Г 1 diusд ,и р = 0. (8)
Ч ( sp ) 1 J
Из уравнения (8) ясно, что Г 1 не определяются однозначно и требуется задание тензора кручения. Поэтому мы будем искать сразу симметрическую аффинную связность из соотношений:
R = ( Rd ) =
д ^у U + Г ^рд^ и5 д у и р = 0,
Г * = Г* 5р р5 .
2. Геометрия изображения плоскости
z = Z o * 0 на картинной плоскости.
С учетом (5) при центральном проектировании (1) горизонтальной плоскости на картинную формулы (6) принимают
вид:
1 = ^р u2 = ^, х1 > 0. (10)
Вычисляя Г 1 из (9), находим, что
X
Г
z 0
2x j z 0
остальные Г 1 = 0.
Из формул (4) находится тензор Риччи:
(
^^^^^.
I г 0
z 0
t *1 ) 2
г 0
, „ 2 „
Д = det R = — > 0.
г 0
Таким образом, уже при классическом центральном проектировании геометрия горизонтальной плоскости не является даже эквиаф-финной, т. е. при параллельном переносе в проективно-евклидовой связности (11) площади не сохраняются, хотя геодезические остаются прямыми с сильно искаженной метрикой и без сохранения параллельности.
Билинейная форма тензора Риччи (12) оказывается эллиптического типа, а его симметрическая часть с матрицей
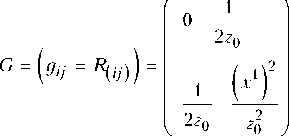
g =--- < 0 — гиперболического. (13)
4 z q
Билинейные формы R и G порождают одну и ту же квадратичную
ф (а) = Д2 zo L
1 2 z ^ a а
+ ( д 1 ) 2 ( а2 ) 2
и конус изотропных (самосопряженных) направлений состоит из двух прямых:
1) я2 = 0 (образ прямых || Ох);
2)Д =- ^ . 2 z 0
Учитывая, что косая часть R
Е = ( еч = КЫ )
— ( 0 ,1
2zo ^ 1 0J
тоже порождает невырожденную билинейную форму, на картинной плоскости в координатах (х1, х2) возникают линейные операторы с матрицами:
3 3z0
Л = s - 1G =
I
В = s ^ R =
^^^^^M
2 I
,
с очевидными зависимостями В = E + А, С = Е + А-1 и им обратные. Заметим, что собственными векторами всех этих операторов служат векторы изотропных направлений квадратичной формы ф ( а ) .
На самом деле это вытекает из структуры матрицы R билинейной формы, т.е. если


_ а + b Г О
, то G =
2 1 1
1 I
I , У )
2с где у =-----, а + b
а - b Г О 1 s =
2 ( - 1 О
и
Л = s- 1G = —-
а + b Г 1 у
b - а I О - 1
собственные направления оператора А совпадают с изотропными направлениями квадратичной формы ф ( а ) и определяются векторами
- Г1) - Л) р = и р2 = • 1 ( 0 ) 2 ( - 2 )
В силу структуры матрицы А этот линейный оператор порождает единственный скалярный инвариант
J = det А
< О
вне зоны ti2 - b2 = 0, (18)
т. е. оператор А меняет ориентацию на противоположную и площади умножаются на 2
Г а + Ь )
а — Ь
•
3. Геометрия изображения плоскости z = z 0 ^ 0 на квадрат О^ц.
В данном случае формулами изображения служат
1 , . х 2 2 1
и = arctg —, и = arctg -°, х > О
и аналогичные вычисления дают значения Г , R:
Г
Г
2х 2
Г 12
х 2 О
22 = -
2Х1
2 О
остальные Г = О,
^ 0 - ( ^ ) 2 - 2-^0
д =
2 )
(Щг2

,
Геометрия по сравнению с п. 2 стала во многом более сложной, так как образ плоскости и прямых на ней ограничен, геодезические линии лишь в частных случаях (рис. 4, 6 [1] и рис. 1 в данной работе) прямолинейны (интервалы), при параллельном переносе площадь (косое произведение) не сохраняется, тензор Риччи — смешанного типа, и если обозначить х1 = Х0 > 0 — корень уравнения А = 0, то хо = -2О + V2 2о , (21)
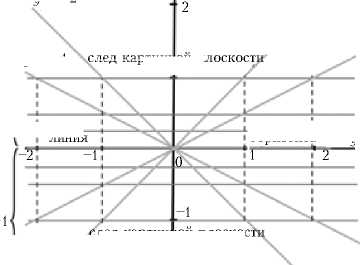
зоны типа R в зависимости от х1 и 2 0 (от х2 они не зависят) делятся по признаку (рис. 2):
е А < 0 е А > 0 х 1
0 х 0
А < 0 — гиперболического типа;
А > 0 — эллиптического типа
Рис. 2
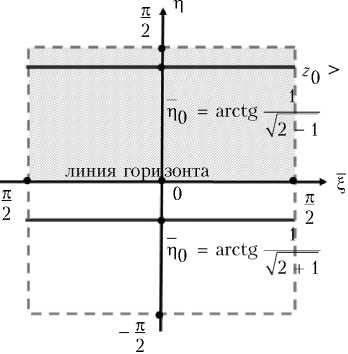
В квадрате О ^р это выглядит так (рис. 3):
^^^^^в д < д = д >
^^^^^в
предельная «рамка» — изображения г0
п о = arcts — (2 0 > 0 ) х 0
ё («з
Рис. 3
Р 0
- arctg
Г 1 1
I 72 + 1 J
для Z 0 < 0,
Плоскости z = Z0 в R3 этим зонам отвечают (рис. 4):
т. е. П 0 зависит только от знака Z 0 . Напоминаем, что Z 0 > 0 отвечает плоскостям выше уровня глаз, а Z 0 < 0 — ниже этого уровня.
Мы не можем дать какое-либо разумное физиологическое объяснение (в отличие от конуса перехода прямой перспективы в обратную в статье [1]).
Такая нессимметрия по знаку z скорее всего связана с построением модели на последнем этапе развертывания сферы в квадрат.
Математически никаких противоречий нет, так как уравнение Д = 0 в области с единственным ограничением х 1 • Z 0 ^ 0 (т. е. включающее и проектирование Е 3 при х1< 0) имеет корни
X
|
• |
|
|
(ЖЖЖЖЖЖЖЖЖ д = х 0 д < 0 |
|
|
' х2 |
Рис. 4
Х 0 = -Z 0 ± V2 ^ = -2 0 ( 1 ± V2) ,
< 2(. 1 (24)
Р 0 = arctg -° = -arctg
_ х0 1 ± V2
Но в положительном полупространстве X i > 0 уравнение (24) дает разные значения
для х0 и Р 0 :
На плоскости z = Z 0 положение X 0 ( Д = 0) зависит от Z 0 (и |^0|, и знака sign Z 0 ), но в
хо = koi (V2 - 1), < хо = ко (V2 + 1),
П о = arctg
П о = arctg
V2 - 1’ 1
V2 + 1’
2 о > о ;
г о < о -
квадрате
(^
Р 0 = arctg
Г 1
I V2 - 1 J
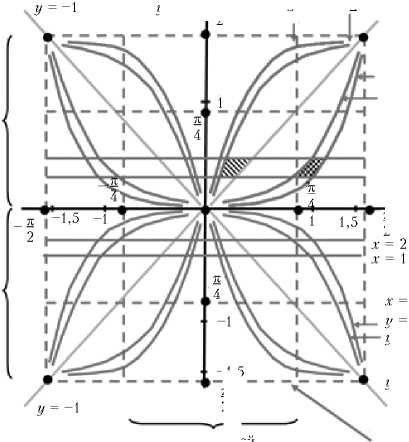
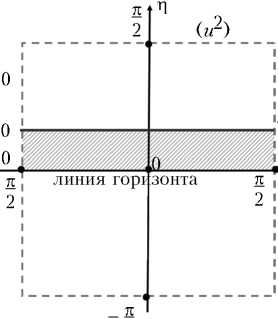
При этом изображается полуплоскость (х1 > 0, х2) при Z 0 > 0 в области квадрата П > 0, а при Z 0 < 0 — в области П < 0 (рис. 5)
для Z 0 > 0,
^^^^^в
^^^^^в
а) изображение ( х 1 > 0, х 2 ) при Z 0 > 0
|
Л |
р |
|
|
2 |
||
|
1 1 1 1 |
1 z0 " 0 1 1 |
|
|
1 1 линия гори |
зонта |
1 |
|
л 1 |
0 |
1 л ^ |
|
2 |___________________________ |
_____1 2 |
|
|
। |
||
|
1 __1 |
||
|
л ^^^^^в ^^^^^в |
||
б) изображение ( х 1 > 0, х 2 ) при Z 0 < 0
Рис. 5
Из формул (16), (17) и (20) следует, что в данном случае
а + b
( х 1 - z 0 ) 2 2 ( Х ) 2 2 о
Во всех точках вне запретных форма G — гиперболического типа, так как д = det G =
( а + b ) 2
( х 1 - z 0 )

а - b _ 3 ( х 1 ) 2 + 2 x 1 z 0 - z 0 ^ _ ( х 1 ) 4 - ( z 0 ) 4
2 2 (Х) zo (х1) z0
и поэтому
Скалярный инвариант (18) имеет значение
J =
-
( x 1 - z o )
2 ( ^1 ) 4 - ( z o ) 4 z o ( ж1 - z o ) 2
3 ( x1 ) + 2x1z o

< o
при
1 , „ x * Z o
и x1 * - Z o + 2 |Zo1
■
т. е. изотропные направления тензора Риччи определяются векторами
Р1 _

Р 2
(х1 + zo ) [( х1 )2
+ z 0
z 0 ( z 0 - х 1 )
■ (26)
Вырождение симметрической части, G, про-
л исходит при X1 - Zo, П = и возможно только при zo > 0, а вырождение косой части, s, при других значениях:
ж 1 _ - z o + 2|z o|
,
n o
= <
_ 3 arctg—
I zo|
1 arrtg — z o
при z o > o,
при z o < o.
Если этот инвариант считать скалярной кривизной в изображении плоскости z - Z o * o, то она отрицательна, но непостоянна, и геометрия только локально может быть приближена к геометрии Лобачевского.
Характер геометрии плоскости изображений лучше определять не глобальным свойством непересечения геодезических, а более локальным — дефектом геодезического многоугольника. В обсуждаемой нами модели существуют четырехугольники в плоскости О ^р , в которых сумма углов меньше 2 л , например, в образе прямоугольника А 1 (а, Ь), А 2 (2а, Ь), А з (2а, 2Ь), А4(а, 2Ь), а в образе трапеции В 1 (а, Ь), В 2 (а, с), В-3(ка, кс), В4(ка, кЬ) сумма углов равна 2 л , так как этот образ — прямоугольник в плоскости О ^р .
Список литературы Проективно-евклидова связность в изображении горизонтальных плоскостей
- Бритов А. В. Одна модель общей теории перспективы Б. В. Раушенбаха/А. В. Бритов, А. Э. Чудаев//Вестн. Мордов. ун-та. Сер. Физ.-мат. науки [Саранск]. 2010. № 4. С. 17 25.
- Норден А. П. Пространства аффинной связности/А. П. Норден. М.: Наука, 1976. 432 с.
- Раушенбах Б. В. Общая теория перспективы/Б. В. Раушенбах//Системы перспективы в изобразительном искусстве. М.: Наука, 1986. 253 с.
