Прогнозирование и управление пропускной способностью полосы на регулируемом перекрестке

Автор: Шепелев Владимир Дмитриевич, Городокин Владимир Анатольевич, Слободин Иван Сергеевич, Хазюков Кирилл Владимирович
Рубрика: Логистика и управление транспортными системами
Статья в выпуске: 2 т.15, 2021 года.
Бесплатный доступ
Точное прогнозирование параметров транспортного потока в режиме реального времени является основой для принятия решения о динамическом управлении полосой движения, которое играет важную роль в уменьшении заторов. Существующие методы не способны запоминать долгосрочные зависимости для получения точного результата предсказания последовательности. В нашем исследовании мы сконцентрировались на разработке алгоритма по адаптивной настройке циклов светофорного регулирования, обеспечивающего проезд всех групповых транспортных средств на основе применения нейронных сетей R-CNN и YOLOv4. В исследовании для прогнозирования потока трафика мы использовали уличные камеры с большим углом обзора. В процессе обучения адаптированы долгосрочная кратковременная память и рекуррентная нейронная сеть. В алгоритмах обучения нейронных сетей учитываются динамические габариты транспортных средств; дискретные параметры очереди перед перекрестком и длительность цикла. Результатом исследования стала разработка алгоритма по адаптивной настройке продолжительности разрешающего такта светофорного объекта с учетом параметров транспортного потока в задачах устранения или минимизации возможности возникновения заторной ситуации.
Нейронные сети, компьютерное зрение, пропускная способность перекрестка, умный светофор
Короткий адрес: https://sciup.org/147233909
IDR: 147233909 | УДК: 656.02 | DOI: 10.14529/em210220
Predicting and managing lane capacity at a signal-controlled intersection
Accurate forecasting of traffic flow parameters in real-time is the basis for making decisions about dynamic lane management, which plays an important role in reducing congestion. The existing methods are not able to remember long-term dependencies to obtain an accurate result of predicting the sequence. In our study, we focused on the development of an algorithm for adaptive adjustment of signal control cycles, which ensures the passage of all group vehicles based on the use of R-CNN and YOLOv4 neural networks. In this study, we used surveillance cameras with a large viewing angle to predict the traffic flow. In the process of learning, long-run short-term memory and a recurrent neural network were adapted. The training algorithms of neural networks take into account the dynamic dimensions of vehicles; discrete parameters of the queue before the intersection, and the duration of the cycle. The result of the study was the development of an algorithm for adaptive adjustment of the duration of the resolving cycle of a traffic light object, taking into account the parameters of the traffic flow in the tasks of eliminating or minimizing the possibility of a traffic jam.
Текст научной статьи Прогнозирование и управление пропускной способностью полосы на регулируемом перекрестке
Рост уровня урбанизации, развитие уличнодорожной сети (УДС) городов требует решения проблем повышения пропускной способности УДС, снижения уровня аварийности на дорогах и выбросов вредных веществ. Одним из решений данных проблем в настоящее время является концепция «умный город», которая подразумевает использование информационных и коммуникационных технологий (ИКТ) для разработки инструментов, позволяющих решать социальные и экономические проблемы населения.
Для разработки и внедрения таких инструментов необходимо оперировать информацией о транспортных потоках (ТП) и их характеристиках в режиме реального времени, так как ситуация на дорогах носит стохастический характер. Этому способствует множество факторов, которыми невозможно управлять: погодные условия, аварийные ситуации и т. п.
Со времен бурного развития автомобильного транспорта предпринималось множество попыток борьбы с возникновением заторных ситуаций на УДС городов. Заторы, как правило, формируются на регулируемых перекрестках. Поэтому важно иметь актуальную информацию о состоянии на определенном участке УДС, в частотности на перекрестке, чтобы с помощью настройки цикла светофорного объекта обеспечить его максимальную пропускную способность. От методов статистической обработки данных, собранных натурными наблюдениями, с развитием информационных и цифровых технологий исследователи перешли на более точные и актуальные методы сбора и обработки данных о текущей ситуации на УДС.
Бурное развитие технологий в сфере распознавания объектов в реальном режиме времени нашло применение и в области регулирования трафика уличного движения [1, 2]. С помощью методов обработки изображений и машинного обучения в режиме реального времени исследователи [3–5] предлагают эффективный способ оценки плотности трафика на перекрестке.
Ряд исследователей разработали модели оценки длины очереди транспортных средств (ТС) в городских условиях [6–8].
В работах [9–11] используются методы нечеткой логики и искусственного интеллекта для динамического управления сигналами светофора на перекрестках.
Исследователи [12] также разработали динамическую систему управления трафиком, которая с помощью компьютерного зрения собирает данные о дорожном трафике только между двумя перекрестками.
Одной из сложностей при сборе информации о ТП в режиме реального времени является точность распознавания транспортных средств, в том числе при неблагоприятных погодных условиях и темного времени суток. Этой проблемой занимались исследователи в работе [13], где предложен алгоритм, основанный на R-CNN и быстрой двусторонней фильтрации.
Целью данной работы является разработка методики, позволяющей с использованием возможностей ИТС решать такие вопросы, как:
-
1. Мониторинг и сбор текущей информации на участке УДС (перекрестке) с помощью уличных видеокамер с широким углом обзора и обученной нейронной сетью.
-
2. Устранение или минимизация возможности возникновения заторной ситуации путем изменения как продолжительности конкретной фазы, так и всего цикла работы светофорного объекта.
-
3. Определение зависимости влияния очереди ТС на перекрестке и длительности фазы разрешающего сигнала светофора на пропускную способность перекрестка.
Многообъектное отслеживание
Для обнаружения, отслеживания траектории и измерения скорости ТС были использованы камеры уличного видеонаблюдения с большим углом обзора. Для сбора данных выбраны камеры с широким углом обзора, обеспечивающие видимость всей функциональной зоны перекрестка и прилегающих дорог. Камеры расположены с углом места 30–60° к горизонту, на высоте 14–40 м. Видеопотоки характеризуются стабильной передачей 25 кадров в секунду, поддерживая разрешение 1920×1080 пикселей [14].
Прогресс в точности детекторов объектов сделал парадигму слежения за обнаружением ведущей в задаче слежения за несколькими объектами. В этой парадигме отслеживание формулируется как проблема ассоциации данных, цель которой состоит в том, чтобы объединить нечеткие обнаружения нескольких кадров в длинные треклеты. Классические методы слежения за обнаружением полагаются исключительно на подсказки движения от детектора и решают проблему ассоциации данных с помощью методов оптимизации [15]. Хорошо известными примерами являются отслеживание множественных гипотез [16] и объединенный фильтр ассоциации вероятностных данных [17]. Эти методы решают проблему ассоциации на покадровой основе, но их комбинаторная сложность экспоненциально зависит от количества отслеживаемых объектов, что делает их непригодными для отслеживания в реальном времени. Напротив, недавний трекер SORT [18] показал, что простой венгерский алгоритм с фильтрацией Кал-мана для прогнозирования движения может обеспечить скорость обработки в реальном времени при сохранении хорошей производительности. Стоит отметить, что одновременное обнаружение и отслеживание транспортных средств – область активных исследований [19, 20]. Объединение этих задач может решить проблему производительности, упомянутую выше. Детекторы уже включают в себя функции внешнего вида, точность обнаружения также выиграет от временного контекста изображения.
В начале исследования основой нашего модуля детектирования являлся широко распространенный двухкаскадный детектор Faster R-CNN [21]. Были получены хорошие результаты в точности, но процесс обучения нейронной сети оказался сложным и требовал значительных вычислительных мощностей (рис. 1). Учитывая общую производительность, можно сделать вывод, что разработанная система хоть и показывает многообещающие результаты, но все же отстает от требований к

Рис. 1. Оценка транспортного потока с применением нейронной сети Faster R-CNN
Логистика и управление транспортными системами мониторингу в режиме реального времени. Однако решение по мониторингу транспортных потоков на основе нейронной сети Faster R-CNN может использоваться для оптимизации времени светофора или обнаружения аномалий пропускной способности на перекрестках [18].
Другим примером компромисса между скоростью и точностью является архитектура YOLO [4, 22], которая специализирована для обнаружения транспортных средств с помощью кластеризации якорей, дополнительной нормализации потерь и стратегии слияния многоуровневых функций. Основываясь на задаче обнаружения объектов в реальном времени, нейронная сеть YOLO v4 способна обрабатывать максимальное количество кадров в секунду, при этом она не сильно теряет в точности.
Важной особенностью этой архитектуры является то, что сверточные слои применяются к изображению один раз, в отличие от таких архитектур, как R-CNN [23, 24, 25] и Faster R-CNN [21], что обеспечивает многократное увеличение скорости обработки изображения без значительных потерь в точности: одно изображение обрабатывается в 1000 раз быстрее с использованием YOLO, чем R-CNN, и в 100 раз быстрее, чем Fast R-CNN [9].
Разработанная система мониторинга была протестирована на нескольких перекрестках в г. Челябинске, показав среднюю ошибку подсчета транспортных средств 5,5 %. Погрешность определения скорости автомобиля проекционным методом с учетом калибровки камеры на тестируемом перекрестке не превышала 1,5 м/с [4, 26]. Для обнаружения и классификации ТС использована архитектура нейронной сети YOLOv4 и трекера с открытым исходным кодом (SORT). В процессе обучения нейронной сети было размечено более 25000 исходных изображений. Для работы в слож- ных метеоусловиях (снег, дождь, туман и т. д.) проведена аугментация, что позволило сформировать dataset с 26,7 млн ТС (рис. 2).
Данное решение позволяет поддерживать стабильную точность работы системы при снижении видимости, вызванной погодными условиями.
Расчет пропускной способности
В основе детерминированных моделей транспортного потока лежит функциональная зависимость между отдельными показателями, например, скорость и дистанция между ТС в потоке. Показатель скорости определяет пропускную способность (ПС) полосы движения и может быть использован для более эффективной настройки циклов работы светофорного объекта.
В данном исследовании рассмотрим движение легковых автомобилей по полосе только прямо.
Безопасная дистанция между движущимися друг за другом автомобилями, обладающими сходными тормозными характеристиками D б , рассчитывается по формуле:
-
D 6 = V a • t p , (1)
где V a - скорость транспортных средств, движущихся друг за другом (м/с); tp - время реакции водителя ведомого ТС с учетом дополнительного времени, необходимого для оценки темпа сближения ТС (с).
Исследования средней длины легкового автомобиля и фактической средней дистанции между транспортными средствами, движущимися в связанном транспортном потоке, проведены, как натурным способом, так и с использованием общедоступного интернет ресурса Google Maps. Анализ полученного масштабного изображения показал, что средняя длина легкового автомобиля ( l a ), движущегося в потоке, составляет около 4,6 м, фактическая средняя дистанция между транспортными

Рис. 2. Мониторинг транспортных потоков (YOLO v4)
средствами ( Dб ) находится в пределах 9,2 м.
Теоретически максимально возможное количество легковых автомобилей, способных двигаться на определенном расстоянии ( n a ), можно определить по формуле:
( n a - 1 ) =
S la + D6
где S – расстояние (м); l a – длина ТС (м).
Таким образом, принимая среднее расстояние между перекрестками (500 м) и среднюю длину ТС (при скорости ТП 50 км/ч), максимально возможное количество ТС между перекрестками по одной полосе составит 43 ед.
Руководствуясь основным принципом расчета цикла работы светофорного объекта, согласно которому все ТС, подъехавшие к узлу УДС за время цикла, должны покинуть его за время разрешающего такта, а согласно действующим методическим рекомендациям [27], продолжительность цикла не должна превышать 120 секунд, можно сделать вывод о том, что:
-
1. При двухфазной работе светофорного объекта и соотношении фаз 1:1, продолжительность разрешающего такта ( ti max ) рассчитывается:
-
2. При двухфазной работе светофорного объекта и соотношении фаз 60 %:40 %, продолжительность разрешающего такта рассчитывается:
max min ti = TO - ti -2" tp,r , (3)
где T 0 – продолжительность цикла светофорного объекта (c); ti min – продолжительность разрешающего такта конфликтующего к рассматриваемому направлению (с); tpr – продолжительность промежуточного такта (с).
max max ti = To--ti -2"tpr. (4)
где 2 • t imin = 3 • t i max - продолжительность разрешающего такта конфликтующих к рассматриваемому направлений.
Полученные результаты продолжительности основного такта исследуемого направления в зависимости от цикла работы светофорного объекта и количества фаз показаны в таблице.
Согласно действующим на территории Российской Федерации Правилам дорожного движения при включении запрещающего «желтого» сигнала светофора водитель должен принять меры к снижению скорости в темпе «не прибегая к экстренному» с целью остановки перед стоп-линией. При отсутствии технической возможности остановиться при применении указанного выше темпа снижения скорости в местах, указанных в п. 6.13 Правил дорожного движения РФ, водитель получает право продолжить движение через перекресток. Однако, учитывая тот факт, что в подавляющем числе случаев светофорные объекты перед включением запрещающего «желтого» сигнала используют разрешающий «мигающий зеленый» сигнал, водители транспортных средств при его включении предпринимают меры к снижению скорости в темпе «служебного» торможения с целью остановки в местах, регламентированных требованиями п. 6.13 Правил. При указанных условиях за 3 с до окончания включения разрешающего сигнала светофора водители транспортных средств отказываются от продолжения движения и принимают меры к остановке, исключая, таким образом, данный отрезок времени (tsn) из продолжительности основного такта.
При наблюдении за движением ТС в потоке было обнаружено, что первый автомобиль въезжает на перекресток спустя 3,8 с после включения зеленого сигнала, а последующие автомобили начинают движение через 3,1; 2,7 и 2,2 с за предыдущим ТС. Все следующие автомобили после пятого, въехали на перекресток со средним интервалом в 2,1 с. Таким образом, время задержки старта ТС зависит от его положения в очереди и определяется по формуле:
t z = t z + t - z + t 3 + t 4 + 2,1 " ( n i - 4 ) , (7) где t 1 z , t 2 z , t 3 z , t 4 z – время задержки выезда ТС на перекресток соответственно первого, второго, третьего и четвертого в очереди (с); n i – позиция в очереди i -го ТС.
Продолжительность разрешающего такта
|
Продолжительность основного такта (120 с) |
||||
|
2 фазы |
3 фазы |
|||
|
Соотношение фаз |
50 % к 50 % |
60 % к 40 % |
30 %:30 %:30 % |
40 %:30 %:30 % |
|
Продолжительность основного такта (с) |
57 |
68 |
37 |
51 |
Логистика и управление транспортными системами
Иными словами, например, 15-й автомобиль, находящийся в очереди, начнет движение через 35 секунд после включения разрешающего «зелено- го» сигнала.
Соответственно, после возобновления движения автомобиль должен освободить перекресток. С технической точки зрения это означает, что автомобиль должен достичь такой точки, находясь в которой, при смене сигнала светофора на запрещающий, водитель будет вправе продолжить движение. Данная точка представляет собой положение, при котором расстояние от автомобиля до стоп-линии будет не более необходимого для остановки при применении торможения в темпе «не прибегая к экстренному». Тогда,
о i асс nex ,
где tacc – продолжительность времени необходимо- го для достижения стоп-линии при движении с постоянной скоростью на известном отрезке пути (c); tnex – продолжительность движения транспортного средства с момента применения торможения в темпе «не прибегая к экстренному» до остановки перед стоп-линией (c).
В свою очередь, продолжительность движения транспортного средства с момента применения торможения в темпе «не прибегая к экстренному» до остановки перед стоп-линией определяется по формуле:
tn ex = tl +t2 + 0,5 " Ц + Vaijnex , (9) nex a nex где t1 – продолжительность времени реакции водителя при смене сигнала светофора с разрешающего мигающего зеленого» на запрещающий «желтый» (c); t2 – продолжительность времени запаздывания срабатывания тормозного привода автомобиля (с); t3 – продолжительность времени нарастания замедления автомобиля (с); jnex – замедление авто- мобиля при применении водителем торможения в темпе «не прибегая к экстренному» (м/с2).
Продолжительность времени, необходимого для достижения стоп-линии с момента возобновления движения на известном отрезке пути ( tacc ), определяетс я по ф ормуле:
acc tacc , ( )
a где Sacc – отрезок пути, преодолеваемый транспортным средством, находившимся в очереди, с момента возобновления движения до стоп-линии (м); a – средняя ускорение автомобиля, находившегося последним в очереди, возобновляющего движение при включение разрешающего сигнала светофора (м/с2).
Отрезок пути, преодолеваемый транспортным средством, находившимся в очереди с момента возобновления движения до стоп-линии (Sacc), определяется по формуле:
S acc = ( ^H l a + d ) + 1 0 , (11)
где d – средняя дистанция между транспортными средствами, находящимися в очереди в неподвижном состоянии (м); l 0 – расстояние от первого стоящего в очереди автомобиля до стоп-линии (м).
Таким образом, максимально возможная продолжительность основного такта ( t 0 ), исследуемого направления только прямо для разъезда очереди из ТС, складывается из расчетного времени основного такта ( ti о ), времени стартовой задержки ( ti z ) и времени преждевременного начала снижения скорости (tsn):
t 0 = t i + t i + t sn . (12)
Таким образом, пропускную способность полосы за такт можно рассчитать по формуле:
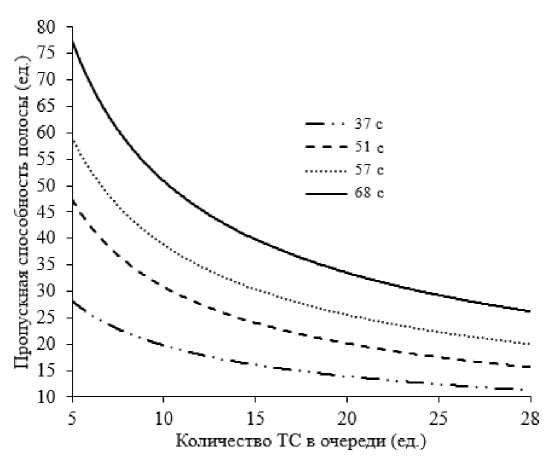
Рис. 3. Зависимость пропускной способности полосы от количества ТС в очереди и продолжительности разрешающего такта при скорости ТП 50 км/ч
Vamax
N0 = ni + ;---— 1ti- la + D6 V7
Использование предложенной методики, как подсистемы ИТС по светофорному регулированию, позволяет рассчитать и спрогнозировать пропускную способность перекрёстка с учетом параметров приближающего транспортного потока (рис. 3).
Таким образом, при средней скорости ТП 50 км/ч и очереди 10 автомобилей при такте 57 с дополнительно могут проехать 33 ТС, пропускная способность такого цикла составит 43 ТС. Если очередь ТС на перекрестке составит 20 и более, то при этом же такте разъедется только очередь, а прибывающие ТС уже не успевают покинуть перекресток и формируют новую очередь во время запрещающего такта.
Предварительные результаты и обсуждение
Приведенная методика расчета пропускной способности полосы движения только прямо на регулируемом перекрестке дает возможность использовать его в существующих ИТС, что позволит решить многие задачи. Сбор данных о параметрах ТП (скорость, плотность, оценка очереди) в режиме реального времени с помощью сверточных нейронных сетей позволит не только рассчитать пропускную способность перекрестка, но и спрогнозировать формирование очереди внегрупповых ТС. Представленная методика позволяет минимизировать формирование заторных ситуаций, изменяя продолжительность как отдельной фазы, так и продолжительность всего цикла светофорного объекта без ущерба для конфликтующего направления.
Список литературы Прогнозирование и управление пропускной способностью полосы на регулируемом перекрестке
- Grents A., Varkentin V., Goryaev N. Deter-mining vehicle speed based on video using convolu-tional neural network. Transportation Research Procedia, 2020, vol. 50, pp. 192–200.
- Shepelev V., Glushkov A., Almetova Z., Mavrin V. A study of the travel time of intersections by vehicles using computer vision. 6th International Conference on Vehicle Technology and Intelligent Transport Systems. Prague, Czech Republic, 2020.
- Prasad D., Kapadni K., Gadpal A., Visave M., Sultanpure K. HOG, LBP and SVM based Traffic Density Estimation at Intersection. IEEE Pune Section International Conference. Pune, India, 2019.
- Khazukov K., Shepelev V., Karpeta T., Shabiev S., Slobodin I., Charbadze I., Alferova I. Re-al-time Monitoring of Traffic Parameters. Journal of Big Data, 2020, vol. 7 (1), no. 84.
- Shepelev V., Aliukov S., Nikolskaya K., Das A., Slobodin I. The Use of Multi-Sensor Video Sur-veillance System to Assess the Capacity of the Road Network, Transport and Telecommunication, 2020, vol. 21 (1), pp. 15–31.
- Jeff Ban X., Hao P., Sun Z. Real Time Queue Length Estimation for Signalized Intersections Using Travel Times from Mobile Sensors. Transportation Research Part C: Emerging Technologies, 2011, vol. 19 (6), pp. 1133–1156.
- Ramezani M., Geroliminis N. Queue Profile Estimation in Congested Urban Networks with Probe Data. Computer-Aided Civil and Infrastructure Engi-neering, 2015, vol. 30 (6), pp. 414–432.
- Li F., Tang K., Yao J., Li K. Real-Time Queue Length Estimation for Signalized Intersections Using Vehicle Trajectory Data. Transportation Research Record, 2017, vol. 2623 (1), pp. 49–59.
- Murat Y.S., Gedizlioglu E. A Fuzzy Logic Multi-Phased Signal Control Model for Isolated Junc-tions. Transportation Research Part C: Emerging Technologies, 2005, vol. 13 (1), pp. 19–36.
- Li J., Zhang H. Study on Optimal Control and Simulation for Urban Traffic Based on Fuzzy Logic. International Conference on Intelligent Computation Technology and Automation. Hunan, China, 2008.
- Wu S., Bi Y., Wang G., Ma Y., Lu M., Xu K. Adaptive Fuzzy Logic Traffic Signal Control Based on Cuckoo Search Algorithm. Smart Innovation, Sys-tems and Technologies, 2019, vol. 127, pp. 107–117.
- Chowdhury M.F., Ryad Ahmed Biplob M., Uddin J. Real Time Traffic Density Measurement Us-ing Computer Vision and Dynamic Traffic Control. Joint 7th International Conference on Informatics, Electronics and Vision and 2nd International Confer-ence on Imaging, Vision and Pattern Recognition. Kitakyushu. Japan, 2018.
- Das A., Pai S., Shenoy V.S., Vinay T., Shylaja S.S. D2: Real-time Dehazing in Traffic Video Analytics by Fast Dynamic Bilateral Filtering. Ad-vances in Intelligent Systems and Computing, 2020, vol. 1024, pp. 127–137.
- Видеонаблюдение в г. Челябинск [Video-nablyudenie v g. Chelyabinsk [Video surveillance in Chelyabinsk]. Available at: https://cams.is74.ru/live (accessed 20.04.2021)
- Fedorov A., Nikolskaia K., Ivanov S. Shepelev V., Minbaleev A. Traffic Flow Estimation with Data from a Video Surveillance Camera. Journal of Big Data, 2019, vol. 6 (1), p. 73.
- Kim C, Li F, Ciptadi A, Rehg JM. Multiple Hypothesis Tracking Revisited. IEEE international conference on computer vision. Santiago, Chile, 2015.
- Barth V B de O, Oliveira R, de Oliveira M A, Nascimento V E. Vehicle Speed Monitoring Using Convolutional Neural Networks. IEEE Latin America Transactions, 2019, vol. 17(06), pp. 1000–1008.
- Bewley A, Ge Z, Ott L, Ramos F, Upcroft B. Simple Online and Real-time Tracking. IEEE interna-tional conference on image processing, Phoenix, AZ, USA, 2016.
- Li C, Dobler G, Feng X, Wang Y. TrackNet: Simultaneous Object Detection and Tracking and Its Application in Traffic Video Analysis. arXiv:1902.01466, 2019.
- Luo W, Yang B, Urtasun R. Fast and Furious: Real Time End-To-End 3D Detection, Tracking and Motion Forecasting with a Single Convolutional Net. IEEE/CVF conference on computer vision and pattern recognition. Salt Lake City, UT, USA, 2018.
- Ren S, He K, Girshick R, Sun J. Faster R-CNN: towards real-time object detection with region proposal networks. IEEE Trans Pattern Anal Mach Intell, 2017, vol. 39(6), pp. 1137–1149.
- Sang J, Wu Z, Guo P, Hu H, Xiang H, Zhang Q, Cai B. An Improved Yolov2 for Vehicle Detection. Sensors (Switzerland), 2018, vol. 18 (12).
- He K, Gkioxari G, Dollar P, Girshick R. Mask R-CNN. IEEE international conference on computer vision. Venice, Italy, 2017.
- Shreyas Dixit KG, Chadaga MG, Saval-gimath SS, Ragavendra Rakshith G, Naveen Kumar MR. Evaluation and evolution of object detection techniques YOLO and R-CNN. International Journal of Recent Technology and Engineering, 2019, vol. 8(3), pp. 824–829.
- He K, Zhang X, Ren S, Sun J. Deep residual learning for image recognition. IEEE conference on computer vision and pattern recognition. – Las Vegas, NV, USA, 2016.
- Shepelev V., Aliukov S., Glushkov A., Shabiev S. Identification of distinguishing characteris-tics of intersections based on statistical analysis and data from video cameras. Journal of Big Data, 2020, vol. 7 (1), no. 46.
- Отраслевой дорожный методический до-кумент: методические рекомендации по проекти-рованию светофорных объектов на автомобильных дорогах. ОДМ 218.6.003-2011. М., 2013. [Otraslevoj dorozhnyj metodicheskij dokument. Metodiche-skie rekomendacii po proektirovaniyu svetofornyh ob"ektov na avtomobil'nyh dorogah [Industry road guidance document. Methodological recommenda-tions for the design of traffic light objects on mobile roads]. ODM 218.6.003-2011, 2013. Moscow, 2013.]
