Программное обеспечение модуля передвижения робота гидромелиорирования (гидробота) по сигналам NFC меток
 по сигналам NFC меток")
Автор: Гришин Александр Петрович, Гришин Андрей Александрович, Гришин Владимир Александрович
Журнал: Агротехника и энергообеспечение @agrotech-orel
Рубрика: Научно-техническое обеспечение процессов и производств в АПК и промышленности
Статья в выпуске: 4 (21), 2018 года.
Бесплатный доступ
Во введении дан краткий очерк систем ориентации мобильного робота для мониторинга и полива каждого, отдельно взятого растения в искусственной экосистеме и сформулирована цель исследований - создать систему ориентации и перемещения робота гидромелиорирования растений в искусственных экосистемах «Гидробот 1,0» у каждого растения для его монитринга и подачи питательного раствора. В разделе результаты и их обсуждение отмечается, что модуль управления передвижением Гидробота реализован на процессоре ATMega. Для привода передвижения использованы шаговые двигатели. Для ориентации используется приемник RFID/NFC, работающий на частоте 13,56 МГц. Приемник NFC считывает специальные метки стандарта ISO 14443, размещенные около каждого из растений. Метки имеют уникальный идентификатор, который используется для идентификации растения для внесения данных в БД. Приводится описание работы программного обеспечения передвижением робота. Приводятся выводы: разработан алгоритм и программное обеспечение передвижения робота гидромелиорирования Гидробот 1.0. Создана система ориентации и перемещения робота гидромелиорирования растений в искусственных экосистемах «Гидробот 1,0» у каждого растения для его мониторинга и подачи питательного раствора. Для ориентации используется приемник RFID/NFC, работающий на частоте 13,56 МГц.
Ориентация, робот гидромелиорирования, nfc метки, алгоритм
Короткий адрес: https://sciup.org/147229195
IDR: 147229195 | УДК: 004.41:621.865.8:631.6:556.5
Hydromeliorative robot (hydrobot) movement module software by NFC tags signals
Introduction: given the review of a mobile robot orientation for monitoring and watering of each individual plant in an artificial ecosystem and formulated the aim of the research is to create a system of orientation and movement of the robot hydromeliorative plants in artificial ecosystems Hydrobot 1,0 in each plant for its monitoring and flow of the nutrient solution. The module of movement control of a Hydrobot is realized on the ATMega processor. To drive the movement used stepper motors. For orientation uses RFID/NFC receiver operating at a frequency of 13.56 MHz. The NFC receiver reads special ISO 14443 labels placed near each plant. Labels have a unique identifier that is used to identify the plant for writing data into the database. The description of the software operation by robot movement is given. Conclusions: the algorithm and software for the movement of the hydro-reclamation robot Hydrobot 1.0 are developed. Created the orientation system and moving robot hydromeliorative plants in artificial ecosystems Hydrobot 1,0 in each plant to monitor and feed the nutrient solution. For orientation uses RFID/NFC receiver operating at a frequency of 13.56 MHz.
Текст научной статьи Программное обеспечение модуля передвижения робота гидромелиорирования (гидробота) по сигналам NFC меток
В робототехнических системах мобильного характера, машинное зрение (МЗ) применяется для осуществления их автоматического перемещения для чего необходимо знать местоположение мобильного средства (мобильного робота) и осуществлять его беспрепятственное перемещение по требуемому маршруту. В работах, посвященных этому предмету, как показывает их изучение, для определения этих функций применяются три термина: ориентирование, навигация и позиционирование мобильного робота. Однако если принять во внимание, что для автоматического перемещения мобильного средства необходимо знать, где оно находится и куда перемещаться дальше, более правильно применять термин ориентирование (ориентация), поскольку согласно определению – этот термин означает поиск на местности наблюдателем (мобильным роботом) своего местоположения относительно сторон горизонта, а также направления движения [1].
Итак, современные системы ориентирования можно разделить на два вида [2]:
-
1) относительные системы, в которых местоположение определяется относительно начального положения объекта;
-
2) абсолютные системы, в которых местоположение определяется на основании данных об окружающей среде.
Абсолютное ориентирование представлено следующими категориями:
-
1) Активные маяки, триангуляция (радиомаяки, инфракрасные (ИК) маяки, Wireless Fidelity (Wi-Fi) маяки, Global System for Mobile Communications (GSM) маяки, Global Positioning System (GPS)).
-
2) Искусственные паттерны (NFC метки, маркеры) для распознавания.
-
3) Естественные паттерны (маркеры) для распознавания.
Так же достаточно распространены радио метки и штрих-коды. Например, их используют такие метод как Radio Frequency Identification (RFID) (радиочастотная идентификация) — метод автоматической идентификации объектов, в котором по средствам радиосигналов считываются или записываются данные, хранящиеся в так называемых транспондерах, или RFID метках.
Одним из успешных применений искусственных меток на практике роботизированный склад, разработанный компанией Kiva Systems, где паттерном является метка с QR-кодом. (Quick Response) QR-код — матричный код (двухмерный штрих-код). Другие коды:
-
- Aztec-код— двумерный матричный штрихкод. Код не зависит от пространственной ориентации, и может быть считан не только при любом угле поворота, но и даже при зеркальном отражении изображения
- Код DataMatrix [3] представляет собой черно-белые элементы
или элементы нескольких различных степеней яркости, обычно в форме квадрата 116
размещённые в прямоугольной или квадратной группе
-
- Код PDF417 [3] Portable Data File — переносимый файл данных — двумерный штрих-код, поддерживающий кодирование до 2710 знаков. В настоящее время PDF417 широко применяется в идентификации личности, учёте товаров, при сдаче отчетности в контролирующие органы и других областях.
-
- Иерархический код «Амёба» — данный тип искусственных ориентиров используется в свободно распространяемом программном обеспечении ReacTVision [4]. Код данных зависит от вложенности чёрных и белых областей друг в друга. Например, маркер имеет следующую иерархию областей: белая область содержит 8 чёрных областей, одна из которых содержит пять белых, другая – две белые, ещё две – по одной белой, а остальные четыре не содержат внутренних областей. Всего разработчики предусмотрели 216 комбинаций данного кода.
Применение искусственных ориентиров на основе двухмерного штрихового кодирования, например, в цеховых и складских помещениях, позволит мобильному роботу эффективно и надежно отслеживать свое положение в пространстве
Цель иследований – создать систему ориентации и перемещения робота гидромелиорирования растений в искусственных экосистемах «Гидробот 1,0» у каждого растения для его монитринга и подачи питательного раствора.
Результаты и их обсуждение
Модуль управления передвижением Гидробота реализован на процессоре ATMega в составе системы управления, разработанной во ФГБНУ ФНАЦ ВИМ [5]. Для привода передвижения использованы шаговые двигатели. Для ориентации используется приемник RFID/NFC, работающий на частоте 13,56 МГц. Данный тип меток решено использовать из-за высокой доступности и низкой стоимости. Приемник NFC считывает специальные метки стандарта ISO 14443, размещенные около каждого из растений. Метки имеют уникальный идентификатор, который используется для идентификации растения для внесения данных в БД. Алгоритм ПО модуля передвижения представлен на рис. 1.
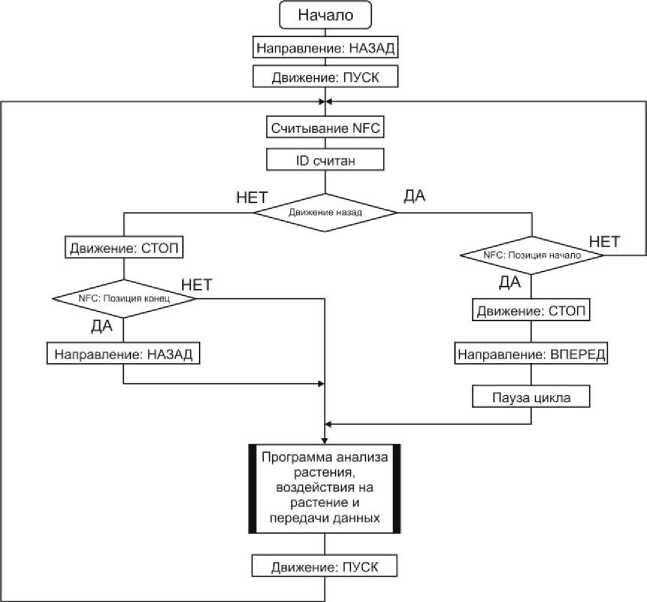
Рисунок 1 - Алгоритм передвижения робота гидромелиорирования Гидробот 1.0
При первом запуске модуля устанавливается направление движения Гидробота в режим «назад» и подается команда «движение».
После этого сразу включается считывание NFC меток. При обнаружении метки в поле действия приемника (это означает, что Гидробот подъехал к растению), происходит определение идентификатора растения. Если осуществлялось движение назад, то осуществляется проверка идентификатора начального растения (первого в грядке). Если растение не начальное, то движение продолжается до следующего растения. Если растение начальное, то движение прекращается. Направление движения устанавливается «Вперед», включается пауза цикла между проходами Гидробота (устанавливается в зависимости от требований).
В случае, если при считывании метки движение осуществлялось вперед, то сразу осуществляется останов Гидробота. После осуществляется проверка позиции конечного растения. Если растение конечное, то направление движения устанавливается в режим «назад», если не конечное растение, то осуществляется переход к запуску программы анализа параметров растения, осуществляется воздействие на растение (полив, внесение удобрения и проч.), осуществляется передача данных в облачное хранилище. После подпрограммы обработки растения подается команда на движение и программа переходит в режим считывания меток.
Выводы
Разработан алгоритм и программное обеспечение передвижения робота гидромелиорирования Гидробот 1.0
Создана система ориентации и перемещения робота гидромелиорирования растений в искусственных экосистемах «Гидробот 1,0» у каждого растения для его мониторинга и подачи питательного раствора. Для ориентации используется приемник RFID/NFC, работающий на частоте 13,56 МГц.
Список литературы Программное обеспечение модуля передвижения робота гидромелиорирования (гидробота) по сигналам NFC меток
- Толковый словарь русского языка. Ориентирование. [Электронный ресурс]. - Режим доступа http://tolkslovar.ru/o5593.html, дата обращения 20.11.18.
- Borenstein J., Everett H. R., Where am I? Sensors and Methods forMobile Robot Positioning - Michigan: University of Michigan, 1996. - 282с.
- Акчурин В.А. Разработка системы расширенной реальности для моделирования трехмерных сцен [Электроннный ресурс].-Режим доступа:http://masters.donntu.edu.ua/2012/iii/akchurin/diss/index.htm дата обращения 20.11.18.
- ReacTVision [Электроннный ресурс]. - Режим доступа: http://reactivision.sourceforge.net/ дата обращения 20.11.18.
- Гришин А.П., Гришин В.А., Гришин А.А., Годжаев З.А. Ключевые технологии и прогноз развития сельскохозяйственной робототехники // Энергообеспечение и энергосбережение в сельском хозяйстве // Труды Х-й Международной научно-технической конференции (24 - 25 мая 2016 года, г. Москва, ГНУ ВИЭСХ). В 5-ти частях. Часть 5. М.: ГНУ ВИЭСХ, 2016, с. 66-73.
