Промышленные мехатронные электропневматические приводы

Автор: Илюхин Юрий Владимирович, Харченко Александр Николаевич, Арфикян Сергей Андреевич
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Физико-математические науки
Статья в выпуске: 8 (51) т.10, 2010 года.
Бесплатный доступ
Изложена концепция построения промышленных электропневматических следящих приводов в соответствии с мехатронным подходом, описаны особенности предлагаемых структур приводов и приведены результаты экспериментальных исследований их динамических свойств. Доказано, что приводы, построенные на основе предложенных структур, обладают высокой точностью и быстродействием.
Мехатроника, электропневматический следящий привод, компьютерное управление
Короткий адрес: https://sciup.org/14249469
IDR: 14249469 | УДК: 681.513.3
Industrial mechatronic electropneumatic drives
The construction concept, the structural features and the experimental results of dynamic behaviour of industrial electropneumatic servo drives built on the ground of the mechatronic approach are described. It is proved that such drives are of high precision and operation speed.
Текст научной статьи Промышленные мехатронные электропневматические приводы
Особенностью ЭПСП, разработанных на основе пропорциональных элементов (рис.1), является использование интегрированных в их структуру современных мехатронных модулей – пропорциональных электропневматических регуляторов давления (МЭПРД), например, МЭПРД серии ER200 компании Camozzi [2]. Они одновременно являются и элементами энергетического канала, влияющими на быстродействие привода, и элементами управляющей части привода, определяющими качество процессов управления движением. Применение МЭПРД ведет к образованию замкнутых подсистем регулирования давлений в полостях пневмоцилиндра, а пара таких МЭПРД представляет собой основу подсистемы регулирования силы, развиваемой приводом, которая образует мехатронный силовой агрегат (МСА). МСА является сложной динамической системой, его силовая часть описывается системой из 14 дифференциальных уравнений, правые части которых содержат нелинейные функции.
Установлено, что требуемые динамические свойства ЭПСП обеспечиваются с помощью программно реализуемых в управляющей ЭВМ линейных и нелинейных законов управления и интегрированных мехатронных модулей при одновременном сокращении состава используемых аппаратных компонентов привода (рис.1).
фильтры
Вычислитель скорости
Мехатронный электропневматический следящий привод (ЭПСП)
ф
ф га
о
о
Управляющая компьютерная Мехатронный силовой агрегат часть привода
^МРД1 МРД2^
Аналоговые
^лок коррек-* тирующих устройств и программной фильтрации
Блок управления в реальном ^времени^
Блок формирования задающих воздействий
Блок регулято ров
ИСТОЧНИК СЖАТОГО ВОЗДУХА
......Елок"""
-►: вычисления СКО^ОСТИ^
Информационно-измерительная подсистема
|ЦАП| |ЦАГ1|
Рис.1. Структура ЭПСП с мехатронным силовым агрегатом
Исследования показали, что эффективными являются два варианта разработанных мехатронных ЭПСП. Один из них содержит ПИД-регулятор положения, выдающий управляющее воздействие непосредственно на МСА. Другой ЭПСП оснащен П-регулятором положения и содержит внутренний контур регулирования скорости с ПИД-регулятором. Вариант ЭПСП с ПИД-регулятором положения является более простым и поэтому оказывается более привлекательным во многих случаях практического промышленного применения. Для достижения высокого качества управления целесообразно применить алгоритмы фильтрации сигналов датчиков обратных связей и фильтр нижних частот в канале дифференциальной составляющей регулирования ПИД-регулятора положения.

Рис.2. Структура привода на базе дискретных элементов
Высокие показатели качества ЭПСП, построенного на базе распределителей дискретного действия (рис.2), достигаются в результате многоскоростного релейного управления, реализуемо- го с помощью компьютерного устройства управления [3], которое формирует команды, передаваемые через блок дискретных выходов ДВ на блок распределителей дискретного действия в составе силовой части привода. Изменение направления движения поршня и его остановку обеспечивает пневмораспределитель со структурой 5/3, а блок распределителей со структурой 2/2 служит для подключения к выхлопной полости цилиндра дросселей, обладающих разной пропускной способностью, и регулирования скорости движения поршня. Совокупность дискретных управляющих воздействий на распределители формируется в функции от рассогласования ЭПСП.
Динамические свойства ЭПСП существенно зависят от количества распределителей и значений параметров законов управления ими, реализуемых с помощью ЭВМ. Исследования и опыт применения ЭПСП свидетельствуют о целесообразности использования 3-4 распределителей со структурой 2/2, но в некоторых случаях их количество может быть значительно больше для получения более широкого диапазона регулирования.
Результаты экспериментальных исследований мехатронных ЭПСП. Результаты проведенного экспериментального исследования подтвердили высокое качество разработанных промышленных мехатронных ЭПСП. Во всех экспериментах использован пневматический цилиндр компании Camozzi с диаметром 125 мм и ходом 320 мм, широко применяемый при решении задач автоматизации в различных областях промышленности. ЭПСП на основе МСА обладает высокой точностью. Погрешность позиционирования x P C не превышает 0,1 мм, а перерегулирование практически отсутствует (рис.3, а ). При этом длительность переходного процесса составляет 0,6 с, а скорость поршня на этапе разгона достигает 800 мм/с, что говорит о значительном быстродействии привода. Ошибка x P D отработки ЭПСП гармонических воздействий невелика (рис.3, б ) и при круговой частоте 3 рад/с и амплитуде входного воздействия, равной 50 мм, составляет 9,5 мм.
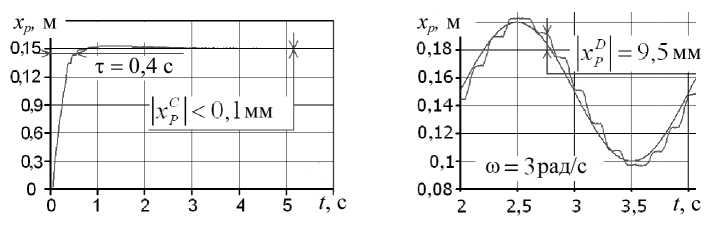
а ) б )
Рис.3. Результаты отработки ЭПСП ступенчатых воздействий при действии внешних сил до 3500 Н ( а ) и гармонических воздействий с круговой частотой 3 рад/с ( б )
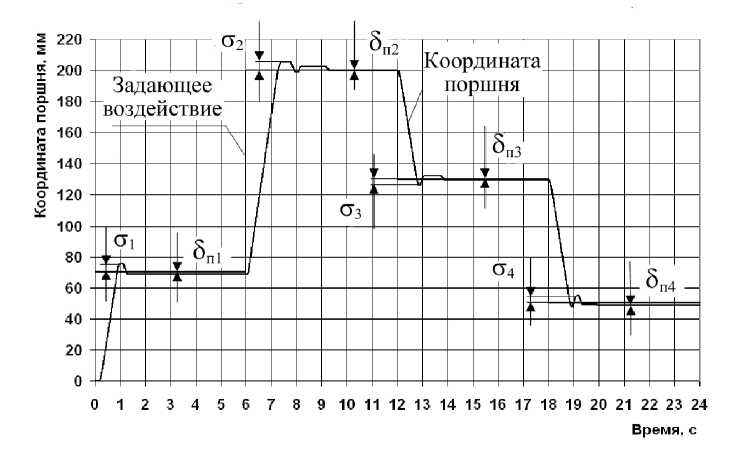
Рис.4. Результат отработки приводом ступенчатых воздействий:
δ П1 =0,52 мм, δ П2 =0,17 мм, δ П3 =0,52 мм, δ П4 =0,35 мм, σ 1 =6,9%, σ 2 =3,8%, σ 3 =3,4%, σ 4 =4,5%
Результаты экспериментального исследования ЭПСП с распределителями дискретного действия показали, что при отработке приводом серии ступенчатых воздействий (рис.4) погрешность позиционирования δП не превышает 0,8 мм, перерегулирование не более 7%, а скорость поршня достигает 100 мм/с.
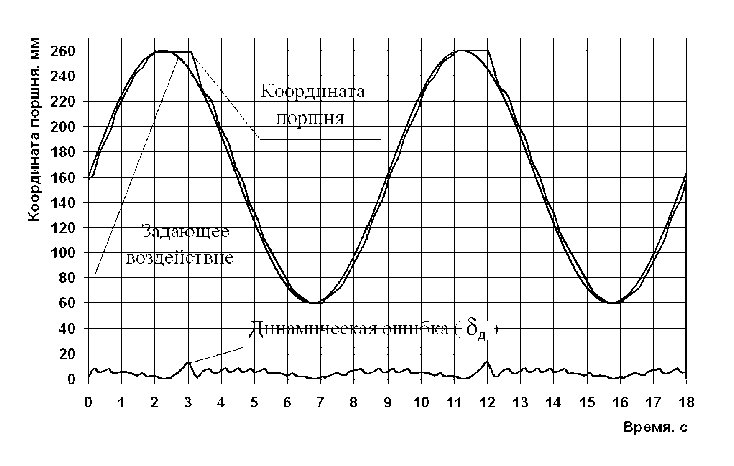
Рис.5. Отработка гармонического воздействия ЭПСП на основе дискретных элементов
Установлено, что ЭПСП на основе дискретных элементов эффективно отрабатывает не только ступенчатые, но и непрерывно изменяющиеся во времени задающие воздействия. Например, при входном гармоническом сигнале с амплитудой 100 мм и круговой частотой 0,7 рад/с ошибка ЭПСП δ Д лежит в диапазоне от 0 до 13,5 мм (рис.5).
Выводы. Результаты исследования свидетельствуют о расширении функциональных возможностей и достижении высокой точности и быстродействия мехатронных ЭПСП при позиционировании и отработке изменяющихся задающих воздействий, в том числе при действии внешних сил. Поэтому разработанные мехатронные ЭПСП рекомендуются для широкого применения в промышленности.
Главными преимуществами ЭПСП на базе распределителей дискретного действия являются простота конструкции, высокая надежность, использование серийно выпускаемых компонентов, невысокая стоимость, применение алгоритмов цифрового релейного управления.
ЭПСП на основе МСА с мехатронными регуляторами давления являются сложными системами, но позволяют получить более высокую точность и широкий диапазон регулирования скорости движения выходного звена привода.
Список литературы Промышленные мехатронные электропневматические приводы
- Илюхин Ю.В. Расширение функциональных возможностей электропневматических следящих приводов с компьютерным управлением/Ю.В. Илюхин, С.А. Арфикян//Мехатроника, автоматизация, управление: материалы междунар. науч.-техн. конф. (МАУ -2009). -Таганрог: Изд-во ТТИ ЮФУ, 2009, -С.246-248.
- Илюхин Ю.В. Электропневматические пропорциональные регуляторы давления компании CAMOZZI/Ю.В. Илюхин, А.Н. Харченко//Новости приводной техники. -2008. -№2(82). -С.3-4.
- Илюхин Ю.В. Позиционные и следящие электропневматические приводы. Мехатрон-ные решения Камоцци/Ю.В. Илюхин, С.А. Арфикян//Новости приводной техники. -2009. -№7-8(96). -С.3-4.
- Ilyuhin Yu.V. Rasshirenie funkcional'nyh vozmojnostei elektropnevmaticheskih sledyaschih privodov s komp'yuternym upravleniem/Yu.V. Ilyuhin, S.A. Arfikyan//Mehatronika, avtomatizaciya, upravlenie: materialy mejdunar. nauch.-tehn. konf. (MAU -2009). -Taganrog: Izd-vo TTI YuFU, 2009, -S.246-248. -In Russian.
- Ilyuhin Yu.V. Elektropnevmaticheskie proporcional'nye regulyatory davleniya kompanii CAMOZZI/Yu.V. Ilyuhin, A.N. Harchenko//Novosti privodnoi tehniki. -2008. -№2(82). -S.3-4. -In Russian.
- Ilyuhin Yu.V. Pozicionnye i sledyaschie elektropnevmaticheskie privody. Mehatronnye resheniya Kamocci/Yu.V. Ilyuhin, S.A. Arfikyan//Novosti privodnoi tehniki. -2009. -№7-8(96). -S.3-4. -In Russian.
