Пути повышения безопасности и производительности труда при погрузочно-разгрузочных и строительно-монтажных работах

Автор: Голдобина Любовь Александровна, Орлов Павел Сергеевич, Орлов Артем Павлович
Журнал: Технико-технологические проблемы сервиса @ttps
Рубрика: Методические основы совершенствования проектирования и производства технических систем
Статья в выпуске: 2 (16), 2011 года.
Бесплатный доступ
Рассмотрена проблема раскачивания грузового подвеса. Предложено гашение колебаний посредством применения гиростабилизатора. Теоретически обоснован и разработан на уровне изобретения одноосный силовой гиростабилизатор, предназначенный для обеспечения стабилизации в двух вертикальных плоскостях.
Гибкий подвес; раскачивание груза; безопасность; силовой гиростабилизатор; колебания
Короткий адрес: https://sciup.org/148186444
IDR: 148186444 | УДК: 69.002.5
Ways to increase the labour safety and productivity during civil building works and loading and unloading
The problem of rocking of cargo is considered.Clearing offluctuations by meansof application of the gyroscopic stabilizer is offered.The monoaxial power gyroscopic stabilizer intendedfor maintenance of stabilization in two vertical planes is theoretically proved and developed at inventionlevel.
Текст научной статьи Пути повышения безопасности и производительности труда при погрузочно-разгрузочных и строительно-монтажных работах
Травматизм, вызываемый аварийностью строительных кранов при производстве строительно-монтажных работ, возникает вследствие отказов отдельных компонентов системы «человек – строительная машина – среда», а поэтому устранение технических неисправностей машин и механизмов, совершенствование их конструкции должно осуществляться разработкой и внедрением мероприятий по активной, пассивной и послеаварий-ной безопасности.
Активная безопасность возможна только в случае, если машина является управляемой. Автоматизированные средства управления строительных машин позволят освободить оператора от части операций по управлению машиной, тем самым повысить безопасность, производительность и качество работ. Однако автоматизация эффективна лишь тогда, когда применяются системы гашения колебаний груза. В противном случае раскачивания груза вносят неопределенность в управление краном, увеличивая энтропию системы ОСМС, и сводят к нулю эффект от автоматизации.
Известно, что все попытки добиться увеличения производительности кранов только увеличением их рабочих скоростей оканчивались снижением средней производительности крана по двум причинам: во-первых, увеличивалось время на точную остановку и успокоение колебаний груза; во-вторых, возрастало время простоев крана в результате повышения износа и отказов аппаратуры управления из-за увеличения числа включений, необходимых для гашения колебаний груза.
Проблема раскачивания груза на гибком подвесе и причины этого процес-
Пути повышения безопасности и производительности труда при погрузочно-разгрузочных и строительно-монтажных работах са в целом известны. Неустранимый колебательный процесс грузового подвеса в вертикальной и горизонтальной плоскостях влечет за собой снижение производительности крана за счет увеличения времени, необходимого на наводку и точную посадку груза, создавая при этом опасные условия труда для монтажников и стропальщиков. Раскачивание груза приводит к колебаниям металлоконструкции крана, которые вызывают вибрации кабины, оказывающие вредное и порой опасное воздействие непосредственно на оператора. Осуществляя монтажные работы в течение смены под действием низкочастотных вибраций, оператор находится в состоянии «морской качки», которому свойственны рассредоточения внимания, быстрая утомляемость, головокружение, тошнота. В таком состоянии оператор становится потенциально опасным, поскольку на нем лежит ответственность, как за собственную безопасность, так и за безопасность людей на строительной площадке. Поэтому проблема гашения колебаний груза является актуальной как в плане обеспечения сопротивления усталости металлических конструкций, так и в плане обеспечения безопасных условий труда крановщику и членам бригады.
Следует также отметить, что помимо причин, перечисленных выше и объясняющих несомненную актуальность поставленной задачи, существуют и другие, над решением которых уже долгие годы работают зарубежные и отечественные специалисты: М.П. Александров, А.А. Алейнер, В.И., Брауде, А.А. Вайн-сон, Д.П., Волков, Н.И. Григорьев, С.А. Казак, Б.Г. Коренев, В.Ф. Сиротский, Corriga Giorgio, Gina Alesscmdro, Thiemann Peter, Arend Detlef, и многие другие [1-5].
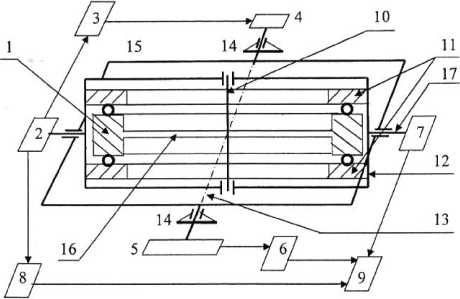
Нами теоретически обоснован и разработан на уровне изобретения одноосный силовой гиростабилизатор (рис. 1, 2), содержащий двухстепенной гироскоп с датчиком угла прецессии, выход которого через усилитель стабилизации соединен с двигателем стабилизации, последовательно соединенные акселеро- метр и усилитель коррекции, с целью повышения точности в него дополнительно введён оптимальный линейный фильтр, отличающийся тем, что для обеспечения стабилизации в двух вертикальных плоскостях ось гироскопа расположена вертикально, а массивный обод ротора гироскопа помещен в упорный горизонтальный подшипниковый узел, расположенный в вертикальной раме симметрично относительно центральной поперечной горизонтальной оси устройства, воспринимающий вертикальные нагрузки и исключающий деформации ротора и оси гироскопа и возникающие вследствие этого прецессии, влияющие на точность и скорость стабилизации объекта, а сигнал с выхода оптимального линейного фильтра и сигнал коррекции суммируются и подаются на прецессионный двигатель вертикальной рамы гироскопа, парирующий совместно с двигателем стабилизации горизонтальной рамы вынужденной прецессией возможные значительные отклонения стабилизированной платформы от горизонтального положения под действием внешних сил [6].
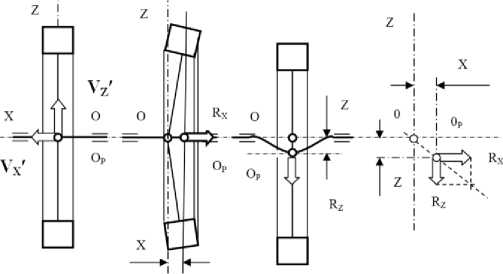
а) б) в) г)
Рисунок 1 – Ротор гироскопа ( а ) и смещение его центра масс ( г) , вследствие упругих деформаций диафрагмы ( б ) и вала ( в )
Разработанное устройство обладает рядом существенных особенностей:
-
1. Для обеспечения стабилизации объекта в двух вертикальных плоскостях ось гироскопа расположена вертикально;
-
2. Массивный обод ротора помещен в упорный подшипниковый узел, исключающий деформации и оси гироскопа, а также возможные прецессии, вы-
- Л.А. Голдобина, П.С. Орлов, А.П. Орлов
-
3. Подшипниковый узел расположен на вертикальной раме симметрично относительно центральной поперечной горизонтальной оси устройства;
-
4. Горизонтальный подшипниковый узел воспринимает нагрузки от ротора гироскопа;
-
4. Значительные отклонения от горизонтального положения стабилизируемой платформы парируются прецессионным двигателем вертикальной рамы совместно с двигателем стабилизации горизонтальной рамы.
званные деформациями и влияющие на точность стабилизации объекта;
Рисунок 2 – Одноосный силовой гиростабилизатор : 1 – гироскоп; 2 – Датчик угла прецессии вертикальной рамы гироскопа; 3 – Усилитель стабилизации; 4 – Двигатель стабилизации; 5 – Акселерометр горизонтальной рамы гироскопа; 6 – Усилитель коррекции; 7 – Двигатель стабилизации горизонтальной рамы; 8 – Оптимальный линейный фильтр; 9 – Сумматор; 10 – Вертикальная ось гироскопа; 11 – Упорный горизонтальный подшипниковый узел; 12 – Вертикальная рама; 13 – Центральная продольная горизонтальная ось; 14 – Стойки стабилизированной платформы объекта; 15 – Горизонтальная рама; 16 – Диафрагма; 17 – Центральная поперечная горизонтальная ось
В устройствах, использующих стабилизирующие свойства гироскопа, ротор вращается с большой угловой скоростью , что создает кинетический момент, необходимый для сохранения неизменного положения главной оси гироскопа в инерциальном пространстве. Угловые скорости отклонения главной оси гироскопа в инерциальном пространстве определяются значением кинетического момента гироскопа: чем больше кинетический момент J , тем меньше угловые скорости дрейфа оси гироскопа, тем выше точность работы устройства. Но одновременно с увеличением кинетического момента, растут моменты внешних возмущающих сил. Для определения требований к конструкции ротора необходимо выяснить силы, создающие возмущающие моменты относительно осей подвеса гироскопа. Для этого рассмотрим идеально сбалансированный ротор, состоящий из массивного обода и гибкого вала, соединенных между собой тонкой диафрагмой (рис. 1, а).
При равномерном движения объекта со скоростью V его ускорение равно нулю; V = 0, а центр ОР массы mP ротора совмещен с точкой О подвеса гироскопа (рис. 1, а). При ускорениях положение точек ОР и О будет нарушаться и на гироскоп начнут воздействовать моменты возмущающих сил, вызывающие отклонения его от первоначального направления. В результате ускорений вдоль осей Х и Z (Рисунок 1, б, в) возникнут силы инерции:
R X = m P V X ;
R Z = m P V Z ; (1)
которые вызовут деформации диафрагмы и вала ротора. В результате центр ОР массы mP ротора сместится относительно точки подвеса О на расстояния X и Z. Амплитуды деформаций зависят от осевой сХ и радиальной сZ жесткостей диафрагмы и вала гироскопа, и определяется из условий равенства упругих и инерци- альных сил по координатным осям:
Хс X = m P V X ;
Zс Z = m P V Z . (2)
В общем случае (рис. 1, г ) силы инерции R X и R Z создадут относительно оси О Y , проходящей через точку О подвеса, возмущающий момент:
М И = R X Z R Z Х , (3)
который вызовет прецессию гироскопа относительно осей подвеса ротора. Угло- вая скорость прецессии вокруг верти- кальной оси подвеса Z равна:
М и J и
mP "Vx'Vx ( 1 ___ 1 ) (4)
J cZ cX
Пути повышения безопасности и производительности труда при погрузочно-разгрузочных и
Равнодействующая сил инерции R X и R Z , направленная по оси О О Р будет создавать на опоры, установленные на оси Y , силовое возд ействие:
F R X 2 R Z 2 , (5)
создавая в подшипниках момент сил трения:
M т R X 2 R Z 2 , (6)
под влиянием которого у гироскопа тоже начнется прецессионное движение, угло-
вая скорость венством:
которого определяется ра-
T
М т
mр
JJ
V X 2 V Z 2 , (7)
где коэффициент момента сил трения. Отсюда: для повышения характеристик гироскопического успокоителя необходимо уменьшить угловые скорости прецессионного движения
Для выяснения влияния конструктивных параметров гироскопа на произведение угловых скоростей прецессии обратимся к произведению (4) и (7):
и T
m P V X V X
J
( )х
c Z
...X )V'X + VZ 2 .
Заменив массу ротора его чим:
c X
весом,
полу-
VX VX иT 3
g 3
G 3
J 2 2
cX cZ
cZ cX
\ / v 2 + Vz 2 •
XZ
Анализ полученного равенства показывает, что ускорения стабилизируемого объекта, ускорение силы тяжести и коэффициент момента сил трения в опорах подвеса не зависят от параметров ротора гироскопа.
Для оценки рациональности конструктивного исполнения ротора гироскопа рассмотрим произведение второго и третьего сомножителей выражения (9)
строительно-монтажных работах коэффициент К, характеризующий работоспособность конструкции:
K = G- ( G )2- cX^c Z -► 0. (10)
J cX cZ
Исходя из значения коэффициента работоспособности К гироскопического успокоителя (10) рациональная конструкция возможна, когда кинетический момент гироскопа J , а разность жесткостей ротора в осевом сХ и радиальном сZ направлениях (сХ сZ) 0.
Повысить кинематический момента гироскопа можно увеличив число оборотов ротора и сосредоточив большую часть массы гироскопа в его ободе большого диаметра (поз. 1, рис. 2), разместив его на сравнительно тонкой диафрагме (16), а для исключения деформаций диафрагмы (16) и оси (10) гироскопа опреть массивный обод гироскопа (1) на упорный подшипник (11), размещенный в вертикальной раме (12) и парирующий осевые и отчасти радиальные деформации, в результате чего жесткость опор ротора в осевом с Х и радиальном с Z направлениях будет примерно одинаковой ( с Х с Z ).
