Расчет динамики баллистической модели ракет

Автор: Пегов Валентин Иванович, Мошкин Игорь Юрьевич
Рубрика: Математическое моделирование
Статья в выпуске: 4 т.10, 2017 года.
Бесплатный доступ
Для обеспечения безопасности испытаний баллистических моделей ракет в гидродинамических бассейнах нашли широкое применение гидравлические улавливающие устройства в виде заполненной водой трубы с глухим днищем. Для ликвидации явления гидроудара в торце трубы предусматривается воздушный колокол. Разработанные математическая модель и метод расчета динамики баллистической модели в гидравлическом улавливающем устройстве позволяют выбрать геометрические параметры улавливающего устройства и проводить торможение модели в заранее заданном расчетном режиме. Уравнение для продольного движения модели получено из уравнения Лагранжа. По предлагаемому методу создана программа на ЭВМ и выполнены примеры расчетов. Проведено сравнение расчетов с экспериментальными данными, полученными при испытаниях в гидробассейне. Наблюдается удовлетворительное соответствие расчетных и экспериментальных данных, что служит подтверждением достоверности и надежности разработанной математической модели тормозного гидродинамического устройства. Разработанная математическая модель позволяет при заданном числе Эйлера и для заданной массы модели выбирать необходимые для торможения основные параметры улавливающего тормозного устройства. Предложенный метод расчета может быть использован для определения геометрических параметров тормозного и улавливающего устройства при проведении испытаний баллистической модели в гидробассейне.
Модель ракеты, гидродинамика, гидравлическое устройство, эксперимент, воздушный колокол
Короткий адрес: https://sciup.org/147159459
IDR: 147159459 | УДК: 629.76.085.5:532.5:519.673 | DOI: 10.14529/mmp170406
Dynamic analysis of a ballistic missible model
A hydraulic catching device in the form of a blind water-filled pipe is widely used to ensure safety in tests of ballistic missile models in hydrodynamic test tanks. An air chamber is provided at the pipe end wall to avoid a water-hammer effect. The developed math model and methodology for analyzing dynamics of a ballistic model in a hydraulic catching device permit to choose geometrical parameters of a catching device and decelerate the model in preset design conditions. The model longitudinal equation was derived from the Lagrange equation. The proposed methodology was used to create a software program and make trial calculations. The calculation data were compared with the experimental ones obtained during tests in a hydrodynamic tank. The calculation and experimental data are in good compliance proving adequacy and reliability of the developed math model for a deceleration hydrodynamic device. In case of the given Euler number and model mass, the developed math model allows choosing basic parameters of a catching decelerating device which are required for deceleration. The proposed methodology can be used to define geometrical parameters of a decelerating and catching device for testing a ballistic model in a hydrodynamic tank.
Текст научной статьи Расчет динамики баллистической модели ракет
При разработке перспективных морских ракетных комплексов нашел широкое применение метод баллистических испытаний моделей в специализированных гидродинамических бассейнах. Его применение позволяет на ранних стадиях проектирования выбирать наиболее оптимальные при заданных ограничениях гидродинамические схемы старта, ракет [1]. Для обеспечения безопасности испытаний и сохранения многоразового использования модели применяют различные системы улавливания и торможения модели. Наиболее надежными и безопасными из них зарекомендовали себя гидравлические системы, в которых модель по направляющим входит и тормозится в заполненной водой цилиндрической трубе с глухим днищем [2]. Однако разработка метода, их расчета остается до сих пор актуальной. В статье разрабатывается математическая модель и метод расчета динамики баллистической модели в гидравлическом улавливающем устройстве, которые позволяют выбирать его геометрические параметры и проводить торможение модели в заранее заданном расчетном режиме, что позволяет снизить перегрузку модели и возникающее избыточное давление жидкости в трубе [3]. Области знаний, связанные с исследованием динамики баллистических моделей ракет, расчетно-теоретическим и экспериментальным исследованиям подводного старта, а. также сопутствующие им процессы с нестационарными двухфазными потоками с учетом тепломассобмена, является в настоящее время актуальными, и им посвящены работы многих авторов [4-8].
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
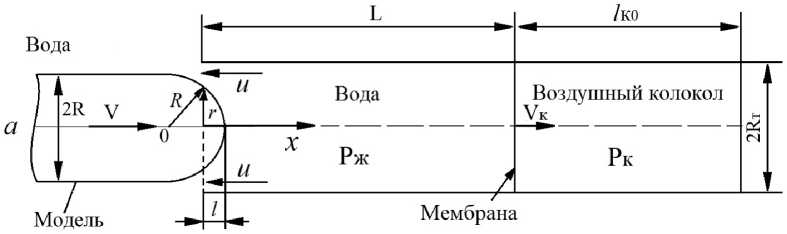
На рис. 1 приведена схема гидравлического улавливающего устройства, которое состоит из цилиндрической трубы с глухим днищем. Модель начинает тормозиться при входе носка модели в трубу (рис. 1 а), более интенсивное торможение происходит после входа носка модели в трубу (рис. 1 б). С целью смягчения процесса торможения, а также ликвидации возможных явлений гидроудара (пиков давления в жидкости и перегрузок модели) в торце трубы дополнительно предусматривается воздушный колокол, загерметизированный эластичной или легкоразрушаемой мембраной. При возникновении избыточного давления в жидкости мембрана смещается к торцу, давление в объеме колокола при этом возрастает. При входе носка модели в затопленную трубу между моделью и трубой образуется кольцевой зазор, через который вода начинает вытесняться из трубы. Модель обычно представляет собой вытянутое тело вращения с цилиндрическим корпусом, заканчивающимся плоским срезом, а профилированная форма носка близка к сферической.
Воздушный
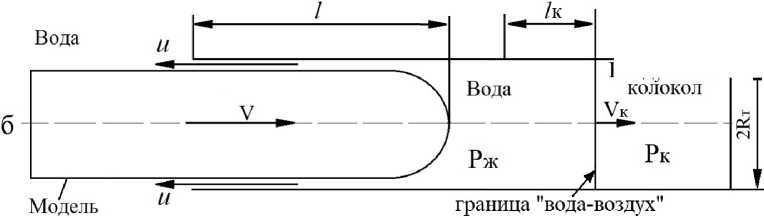
Рис. 1. Схемы улавливающего гидравлического устройства: а - вход носка модели, б - движение в трубе
Площадь поперечного сечения кольцевого зазора при входе сферического носка в трубу зависит от координаты его сечения x
Sk з = п ( x 2 — 2 Rx + RT ) пpn l < R.
После входа носка в трубу площадь кольцевого зазора становится постоянной и определяется равенством
S K.з = п ( RT — R 2 ) при l > R. (2)
Здесь l - путь, пройденный моделью, R, RT - радиусы модели и трубы.
Для определения скорости границы VK используем интеграл Коши - Лагранжа для течения жидкости в трубе дф VI Pk = Pk at + 2 + р р 1
В.И. Пегов, И.Ю. Мошкин
где ф = xVK - потенциал скороети течения в трубе, VK = дф/дх - скорость жидкости, PK - давление в воздушном колоколе. Р ж ~ давление жидкости в трубе, p - плотность жидкости. Из интеграла Коши - Лагранжа найдем дифференциальное уравнение для
скорости границы
dVK _ P I< — PK VK
- dt pxK 2 xK ’
где xK = L — l + lK . Дифференциальное уравнeiiiie перемещения границы lK
= V k • ∂t
Начальные условия при t = 0 для уравнения (4) VK = 0, для уравнения (5) 1K = 0. В адиабатическом приближении выражение для давления в объеме колокола примет
вид
PK = PK 0
PK 0 )
lK 0 - lK
где PK 0 , PK - начальное и текущее давлеиия в воздушном колоколе. 1K 0 - начальная длина воздушного колокола, к = 1 , 4 - показатель адиабаты для воздуха.
Составляющая кинетической энергии течения воды в трубе, вызванное скоростью мембраны, запишется в виде
TK = ^ K ST ( L — l + lK ) ,
где ST - площадь сечення трубы ST = nRT . L - начальная координата, х границы колокола, l - путь, пройденный моделью.
Дифференциальные уравнения продольного движения модели получим исходя из закона количества движения, представленного в виде уравнения Лагранжа [1]
d ∂T Σ dt ∂V
Здесь производная по времени d берется в подвижной системе координат, Т ^ - суммарная кинетическая энергия, V - продольная скорость модели в направлении OX, F - главный вектор всех сил, приложенных к модели, кроме уже учитываемых в уравнении Лагранжа сил воздействия невязкой жидкости.
Исходя из представленной на рис. 1 схемы, значение Т ^ представим в виде суммы
T s = ( M + А ) V 2 + ТК з+ T k ,
где M - масса, модели. А - присоединенная масса, модели в жидкости. Т^з - составляющая вызываемого течения воды в кольцевом зазоре, TK - составляющая, обусловленная движением границы раздела « воздух-вода » воздушного колокола, рассчитываемая по формуле (7). Исходя из известных зависимостей присоединенных масс сферы (А с ф = 3 npR 3) и ди ска ( А = 3 pR 3), приближенное выражение присоединенной массы модели, состоящей из цилиндрического корпуса, заканчивающегося сзади плоским срезом а, спереди сферическим носком, запишем в виде
А = 3 PR 3 + 3 PR 3 = П у^ PR 3 • (Ю)
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
Входящая в (8) сила F, связанная со свойствами вязкости жидкости, определяется как сила вязкого трения модели с коэффициентом Cxf
F =
-Cxf
S ρu 2
S 2 ,
(П)
где S = nR 2 - площадь миделя модели. Однако из-за малой величины этой силы далее будем полагать ее равной нулю ( F = 0).
Скорость вытесняемой через кольцевой зазор воды и в соответствии с уравнением неразрывности и равенствами (1), (2) определяется в сечении кольцевого зазора с координатой x выражениями u=
V (2 Rx - x 2) - V k RT
( x 2 - 2 Rx + RT )
VR 2 - VKRT 2
= RT - RR
при l < R, при l > R.
Для определения Ткз запишем приращение присоединенной массы dm в сечении кольцевого зазора dm = pS^dx.
В соответствии с этим приращение кинетической энергии dT^3 представим в виде dTK 3 = Р^- SK3dx
II Ткз найдем как интеграл по пути модели l т - Р f l 2 Q д - PV2 т TK 3 = 2 J u SK idx = “У J, где J = I V2SK>dx.
После проведения интегрирования с учетом формул для скорости и (12) и + кз (1), (2), получим при входе носка модели в трубу ( l < R ) и при последующем движении модели в трубе ( l > R )
J i (l ) = п {l ( l 2 / 3 - Rl + R 2T ) + 2 lRT V k +
(1 - Vk)2R4 l - R R M при l < R.
l > R.
+-- . - arctg — . : + arctg
RT 2 - R 2 R 2 T - R 2 R 2 T - R 2
R 2 - VкRT) 2/7
J 2( l ) = J 1( R ) + п R 2 - R 2 ( l - R ) при
Здесь VK = VK/V. J 1( R ) определяется из выражения для J 1 ( l ) nj>11 l = R. то есть
J i( R ) = n^RRT (1 + 2 Vк )
-
+
(1 - V k )2 RT R
VRT - R 2 arcts V RT - R 2
В.И. Пегов, И.Ю. Мошкин
В результате выражение для суммарной кинетической энергии с учетом формул (9), (10), (13) - (15) примет вид
T s( l ) — 2^ММ + А + pJ i( l )) + ^^ KST ( L — l + lK ) при l < R,
T s( l ) — ~( М + А + pJ 1( l ) + pJ 2( l )) + Р 2 K S t ( L - l + I k ) п 1>п l > R.
На основании уравнения Лагранжа (8) и полученных выражений для T Д l ) найдем основные дифференциальные уравнения для скорости движения модели V:
-
- при входе носка модели в трубу:
dV —__1________________ ( V2 (2Rl - l2 - VkRT)2 \ (l < dt М + А + pJi(l)+ pVSt (L — l + Ik) ПР l2 - 2Rl + RT J npn -
-
- при движении модели в трубе:
dV —______________ (.„V2 (R2 - VKRT>2 . l > R dt М+А+pJi(R)+pJ2(l)+ pVSt(L-I+Ik) P RT - R2 )
Для замыкания системы добавим дифференциальное уравнение для пути модели dl — V , а также уравнения (4), (5) для перемещения границы колокола и выражения для давления жидкости в трубе
Рл < — Р ж о +
pV2 (2Rl - l2 - VkRT)2 l2 - 2 Rl + RT при l < R,
P i < — Р ж о +
pV 2 ( R 2 - V k RT )2
R T - R 2
при l < R,
где Р жо ~ начальное давление в трубе.
Разработанная математическая модель реализована в виде программы на ЭВМ. Интегрирование системы дифференциальных уравнений проводилось при этом методом Рунге - Кутты четвертого порядка точности. Результаты расчетов удобно представить в безразмерном виде. Связь между начальной скоростью модели V и начальным давлением в жидкости Р жо выражается числом Эйлера Eu — Ржо/ ( pV0 2). Затем введем следующие безразмерные параметры: времени t — tV 0 /D ( D — 2 R ), массы модели М — М / ( pD 3), скорост и модели V — V/V 0, площади кольцевого зазора 5 — ( DT/D )2 - 1. г,те DT — 2 RT начальной длины всэздушиого колокола, lK о — lK о /D и длины объема, заполненного жидкостью L — L/D. Для опорного варианта расчета приняты следующие численные значения: М — 10, Eu — 0 , 67, 5 — 0 , 27, L — 7, lK о — 3 и t — 52 1 . Результаты расчетов представлены в виде графиков зависимостей 1 7. I3к- Р-ж <>т С г.те Р^ж — Р ж / ( pV^Y I3к — Рк/ ( pV )2).
На рис. 2-4 проводится сравнение расчетов с экспериментальными данными, полученными при испытаниях в гидробассейне. Наблюдается удовлетворительное со ответствие расчетных и экспериментальных данных, что служит подтверждением достоверности и надежности разработанной математической модели тормозного гидродинамического устройства.
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
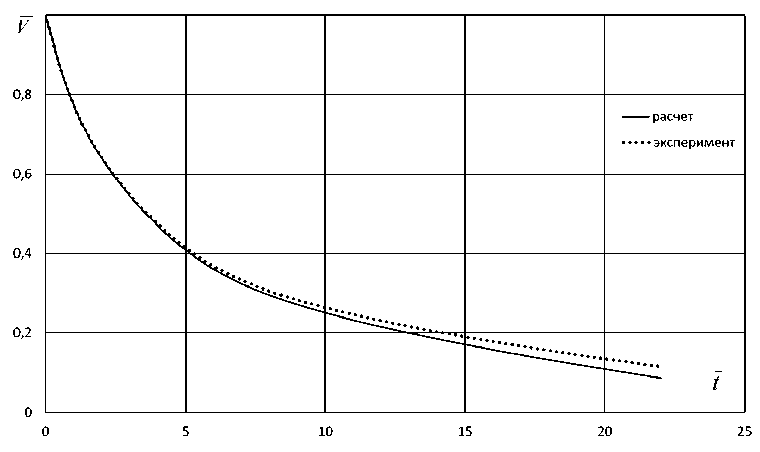
Рис. 2. Сравнение расчетных и экспериментальных значений безразмерной скорости модели V
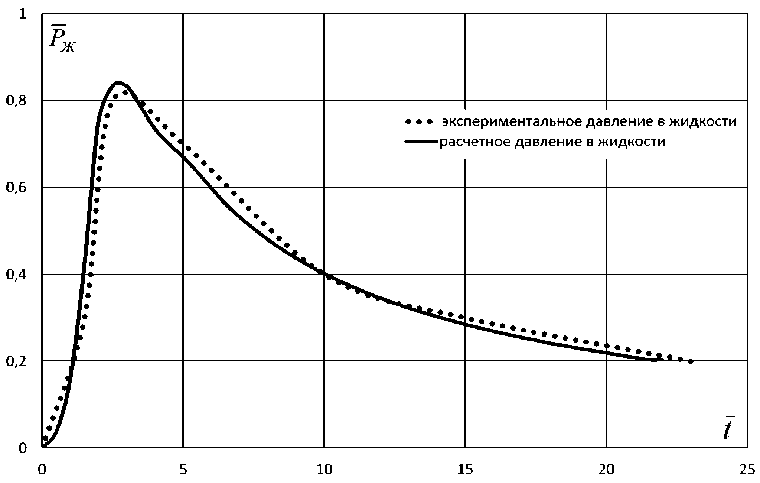
Рис. 3. Сравнение расчетных и экспериментальных коэффициентов давления Рж
Разработанная математическая модель позволяет при заданном числе Эйлера и заданной массе модели выбирать необходимые для торможения основные параметры улавливающего тормозного устройства ( 5, L, 1K о) и найдет использование при экспериментальной отработке подводного старта ракет.
Работа выполнена при поддержке гранта 14-08-00128 Российского фонда фундаментальных исследований.
В.И. Пегов, И.Ю. Мошкин
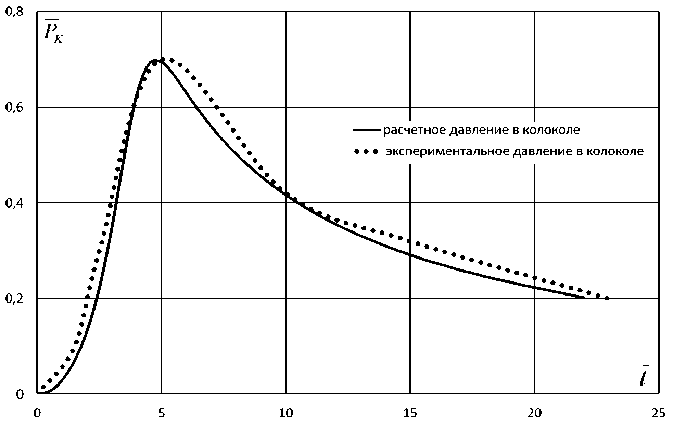
Рис. 4. Сравнение расчетных и экспериментальных коэффициентов давления PK
Список литературы Расчет динамики баллистической модели ракет
- Дегтярь, В.Г. Гидродинамика подводного старта ракет/В.Г. Дегтярь, В.И. Пегов. -М.: Машиностроение, 2009.
- Пегов, В.И. Метод расчета динамики баллистической модели в гидробассейне/В.И. Пегов, И.Ю. Мошкин. -Миасс: ЭТФ ЮУрГУ, 2016.
- Пегов, В.И. Экспериментальное и численное моделирование стартового воздействия на подводную лодку/В.И. Пегов, А.Д. Чешко, И.Ю. Мошкин, Е.С. Меркулов//Взгляд в будущее -2016. -СПб.: ЦКБ МТ Рубин, 2016. -С. 598-605.
- Беневольский, С.В. Баллистика/С.В. Беневольский, В.В. Бурлов, В.П. Казаковцев. -Пенза: Пензенский артиллерийский инженерный ин-т, 2005. -511 с.
- Дмитриевский, А.А. Внешняя баллистика/А.А. Дмитриевский, Л.Н. Лысенко. -М.: Машиностроение, 2005. -244 с.
- Лысенко, Л.Н. Наведение и навигация баллистических ракет/Л.Н. Лысенко. -М.: Изд-во МГТУ им. Н.Э. Баумана, 2007. -672 с.
- Моллесон, Г.В. Обтекание тела газодисперсной струей в широкой области значений параметров торможения/Г.В. Моллесон, А.Л. Стасенко//Теплофизика высоких температур. -2017. -Т. 55, № 1. -С. 94-108.
- Пахомов, М.А. Влияние испарения капель на турбулентность газа и теплообмен при течении двухфазного потока за внезапным расширением трубы/М.А. Пахомов, В.И. Терехов//Теплофизика высоких температур. -2016. -Т. 54, № 3. -С. 352-366.
