Расчет параметров автоматического регулятора частоты вращения двигателей внутреннего сгорания

Бесплатный доступ
Петрозаводский государственный университет
Автоматический регулятор, датчик, тахогенератор, электромагнит
Короткий адрес: https://sciup.org/147112139
IDR: 147112139
Текст научной статьи Расчет параметров автоматического регулятора частоты вращения двигателей внутреннего сгорания
Автоматический регулятор частоты вращения ДВС содержит датчик частоты вращения 5 (тахогенератор), исполнительное устройство 3 (электромагнит) и задатчик 1, с помощью которого определяется скоростной режим работы двигателя путем предварительной деформации пружины 2 (рис. 1).
Рис.1. Автоматический регулятор частоты вращения двигателей внутреннего сгорания: а - устройство автоматического регулятора; б - структурная схема автоматического регулятора; 1 - рычаг задатчика; 2 -пружина; 3 - электромагнит; 4 - рейка топливного насоса; 5 - тахогенератор
С якорем электромагнита непосредственно связан дозирующий орган - рейка 5 топливного насоса.
Таким образом, исполнительным элементом служит электромагнит, к обмотке которого подводится напряжение, вырабатываемое тахогенератором:
и = Кий), (1)
где к и - постоянный коэффициент; со - угловая скорость ротора.
В зависимости от напряжения, поступающего на обмотку, в электромагните возникает сила тяги РЭЛ1, которая определяется выражением:
F3M=(0,47rIWy/87rRM2S.M, (2)
где I - сила тока в обмотке электромагнита;
W - число витков обмотки электромагнита;
RM - магнитное сопротивление магнитопровода;
SM - площадь поперечного сечения магнитопровода.
Для выбранного электромагнита
Км = ^0,4лШУ !87tRM2SM = const, (3)
поэтому Рэл< = КМ12 или F3M=KMU2/R2 , где R - сопротивление области электромагнита.
С учетом уравнения (1)
F3M=KMKU(o2 (r2 ■ (4)
Сердечник электромагнита непосредственно связан с пружиной задатчика, усилие которой
Fnp=F0+bz> (5)
где Fq - усилие предварительной деформации пружины; b - жесткость пружины; z - ход рейки топливного насоса.
Условие статического равновесия имеет вид:
F3m ~ Fnp = 0 • (О
С учетом формул (4) и (5) зависимость z = ^KMKvro2 U2-F0^[b (7)
позволяет построить семейство статических характеристик автоматического регулятора - зависимость хода рейки топливного насоса от угловой скорости (рис. 2).
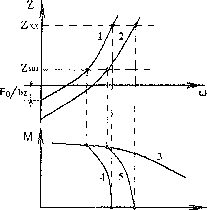
Рис. 2. Статические характеристики автоматического регулятора: 1,2- характеристики регулятора; 3 - скоростные характеристики двигателя; 4, 5 - регуляторные характеристики
Автоматический регулятор с такой характеристикой может быть всережимным, так как с помощью задатчика можно изменять предварительную деформацию пружины. По мере увеличения Fq характеристика смещается вправо. Горизонталь Zxx соответствует холостому ходу, a Znn - полной подаче топлива.
Основные параметры электромагнита как исполнительного элемента определяются его конструктивными параметрами и свойствами применяемых материалов (рис. 3).
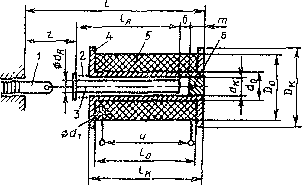
Рис. 3. Электромагнит: 1 - рейка топливного насоса; 2 - пружина; 3 - якорь; 4 - корпус; 5 - обмотка
Чтобы создать требуемое тяговое усилие электромагнита, необходимо определить магнитодвижущую силу:

где цу - величина воздушного зазора; dя - диаметр якоря электромагнита; DK - внешний диаметр электромагнита; 1Я - длина якоря электромагнита; 1К - длина корпуса электромагнита.
Число витков в обмотке
W = Ky(D0-d0)l0/2d2 , (9)
где Ку - коэффициент укладки провода в обмотке электромагнита;
d0 - диаметр провода без изоляции;
Do - внешний диаметр обмотки электромагнита;
dx - диаметр провода в изоляции;
/0 - длина корпуса электромагнита.
Сопротивление обмотки
R = 4plcpw)mp, (10)
где р - удельное сопротивление;
1ср = ДД) + ^о)/2 - средняя длина витка провода в обмотке.
При известном числе витков в обмотке, диапазоне изменения воздушного зазора и силы тока можно рассчитать и построить статические характеристики электромагнита F3l, = /(z) при I = const (рис. 4).
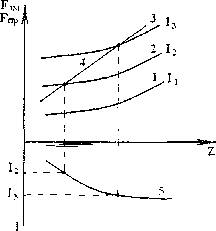
Рис. 4. Статическая характеристика электромагнита с пружиной: 1, 2 и 3 - усилие тяги электромагнита; 4 -усилие тяги пружины задатчика; 5 - равновесная кривая
Нанесение на поле тяговых характеристик электромагнита характеристики пружины Fnp = /(z) позволяет определить координаты равновесной характеристики I = /(z) электромагнита (кривая 5).
Равновесная кривая электромагнита дает возможность определить характеристику тахогенератора.
Так как I = U(R3M и С = KLfto , то К = IR3M ^со . По характеристике 5 определяются / и z равновесной кривой электромагнита и по этим значениям определяют
03 - 2ЛЭ„ / К у
(И)
Список литературы Расчет параметров автоматического регулятора частоты вращения двигателей внутреннего сгорания
- Крутов В. И. Автоматическое регулирование и управление двигателей внутреннего сгорания/В. И. Крутов. М.: Машиностроение, 1989. 414 с.
- Крутов В. И. Сборник задач по автоматическому регулированию двигателей внутреннего сгорания/В. И. Крутов. М.: Машиностроение, 1990. 319 с.
- Юревич Е. И. Электромагнитные устройства автоматики/Е. И. Юревич. М.: Энергия, 1964. 415 с.
