Расчет процесса криволинейного движения транспортной машины на основе конечно-элементного моделирования взаимодействия гусеницы с грунтом

Автор: Абызов Алексей Александрович, Березин Игорь Яковлевич
Рубрика: Численные методы моделирования
Статья в выпуске: 4 т.18, 2018 года.
Бесплатный доступ
Для оценки нагруженности и долговечности элементов ходовых систем транспортных гусеничных машин в настоящее время широко применяются расчетные методы, которые предполагают компьютерное моделирование движения машины по трассе. В процессе движения по трассе гусеничная машина большую часть времени преодолевает криволинейные участки. Такой режим сопровождается интенсивными динамическими нагрузками, действующими на ходовую систему машины, поэтому при математическом моделировании движения важно адекватно описывать силы сопротивления, возникающие при поворотах. В статье приведен обзор известных методов расчета сил сопротивления при криволинейном движении машины. Предложен новый метод определения сил сопротивления. Взаимодействие гусеницы с грунтом рассматривается на ограниченных «активных» участках, прилегающих к опорным катками. Для расчета сил, возникающих в контакте траков и грунта, использован метод конечных элементов. По результатам конечно-элементных расчетов получены зависимости, связывающие нагрузки, действующие на трак, с его перемещением относительно грунта. Представлена методика расчета сил сопротивления повороту с использованием этих зависимостей и алгоритм интегрирования дифференциальных уравнений движения математической модели. Приведены результаты моделирования движения гусеничной машины класса 10 тонн. Использование предлагаемой методики при моделировании движения машины по трассе позволяет получить результаты с учетом формы опорной поверхности траков, свойств грунта и реального распределения нагрузки, действующей на гусеницу со стороны опорных катков. При этом могут быть получены процессы изменения нагрузок, действующих на каждый опорный каток машины. В дальнейшем эти процессы используются для расчета напряжений в исследуемых элементах и получения оценок их долговечности.
Гусеничная модель, криволинейное движение, математическая модель, метод конечных элементов
Короткий адрес: https://sciup.org/147231732
IDR: 147231732 | УДК: 629.114.2 | DOI: 10.14529/engin180408
Calculating curvilinear motion of transport vehicles based on a finite element modeling of track-ground interaction
Calculation methods are widely used to assess the loading and durability of undercarriage elements of tracked vehicles. These methods involve computer simulation of vehicle roading. When roading, tracked vehicles mostly cover curvilinear sections. This mode implies intense dynamic loads acting on the running systems of vehicles. Therefore, a mathematical modeling of motion should adequately describe the resistance forces arising on curved sections of roads. The article reviews methods for calculating resistance forces in a curvilinear motion of vehicles. A new method for determining resistance forces was proposed. Track-ground interaction was considered on limited “active” sections adjacent to the support rollers. The finite element method was used to calculate the forces produced by the contact of tracks and ground. The results of the finite element calculations, allowed us to obtain the dependences that relate the loads acting on the track with its movement along the ground. We proposed a method for calculating the forces of resistance to rotation based on these dependencies. We also proposed an algorithm for integrating differential equations of motion of a mathematical model. The paper presents the results of modeling the motion of a ten-ton tracked vehicle. The proposed method for modeling vehicle roading makes it possible to obtain the results that take into account the shape of the track bearing surface, soil properties, and the actual distribution of the support roller load acting on the track. Moreover, changes in the loads acting on each support roller of a tracked vehicle can be obtained. These processes will be used to calculate stresses in the elements under study and to obtain estimates of their durability.
Текст научной статьи Расчет процесса криволинейного движения транспортной машины на основе конечно-элементного моделирования взаимодействия гусеницы с грунтом
В соответствии с современными требованиями при проектировании новых изделий показатели надежности, определяющие их технический уровень и конкурентоспособность, включаются в техническое задание. В связи с этим в ряде отраслей широкое применение находят расчетные методы, обеспечивающие прогнозирование и управление надежностью на этапах проектирования. Применительно к ходовым системам быстроходных гусеничных машин, эксплуатируемых на необустроенной местности, такая методика предложена в [1, 2]. Ее реализация предусматривает компьютерное моделирование движения машины по трассе в условиях, приближенных к реальной эксплуатации, получение процессов изменения обобщенных координат математической модели, расчет процессов изменения сил, действующих на исследуемые элементы движителя, а также процессов изменения напряжений в опасных зонах деталей. В дальнейшем, с использованием моделей накопления усталостных и износовых повреждений, могут быть получены оценки количественных характеристик надежности тяжелонагруженных элементов машины (средняя наработка до отказа, функция вероятности безотказной работы, гамма-процентный ресурс и т. п.).
Как показывает анализ условий эксплуатации и данных натурных экспериментов, при движении по трассе гусеничная машина большую часть времени находится в состоянии поворота [3]. Поскольку такой режим характеризуется интенсивными динамическими процессами и сущест- венным увеличением нагрузок на ходовую систему, при математическом моделировании важным является адекватное отображение сил сопротивления на криволинейных участках траектории движения. В данной статье описывается методика расчета сил, действующих на опорную по- верхность гусеницы машины, основанная на использовании конечно-элементного моделирования взаимодействия траков с грунтом.
Моделирование взаимодействия гусеницы с грунтом
В настоящее время для описания сил сопротивления при криволинейном движении гусеничной машины используются различные подходы. Одно из описаний сил сопротивления предполагает замену распределенных поперечных нагрузок, действующих на опорную поверхность гусеницы, эквивалентными моментом сопротивления Мс и силой Fс, приложенной к центру тяжести машины (рис. 1, а). В настоящее время в расчетных исследованиях для их определения чаще всего применяют зависимости, предложенные А.О. Никитиным [4]. Продольное проскальзывание гусениц, определяемое движущими силами Fd1 и Fd2, учитывается независимо от поперечного, с использованием тягово-сцепных характеристик. К недостаткам этого метода можно отнести отсутствие учета реального распределения нагрузок, действующих на опорные катки при движении машины, формы опорной поверхности, скорости движения и др.
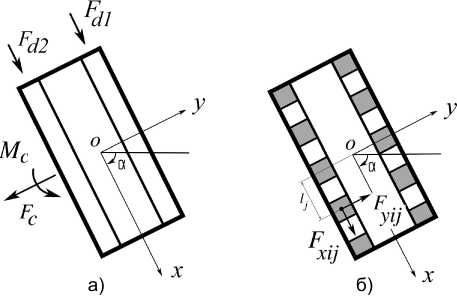
Рис. 1. Нагрузки, действующие на опорную поверхность гусеницы при криволинейном движении машины
Другой подход основан на использовании математической теории трения [5–8]. Силы в контакте гусеницы с грунтом описываются распределенной нагрузкой, действующей на опорную поверхность. Интенсивность и направление нагрузки, вычисляемой в соответствии с законами трения, зависят от давления на грунт и направления скорости проскальзывания. Очевидно, что такой метод не учитывает нагребание грунта боковой поверхностью трака и хорошо подходит только для описания движения машины по жесткой поверхности.
Принципиально иной подход предложен в работах В.И. Красненькова [9]. На основе экспериментальных данных принято допущение, что взаимодействие гусеницы с грунтом в основном происходит в окрестности опорных катков машины на небольших (так называемых «активных») участках. Распределенную по опорной поверхности нагрузку заменяют сосредоточенными силами на «активных» участках (рис. 1, б; F xij – продольная, F yij – поперечная составляющая силы; i = 1…2 – номер борта, j – номер подвески машины). Такая модель позволяет совместно рассматривать проскальзывание опорной поверхности в продольном и поперечном направлениях, а также учесть неравномерное распределение вертикальных нагрузок по длине опорной ветви. Для расчета сил в контакте трака гусеницы с грунтом могут быть использованы различные соотношения, связывающие деформацию грунта с действующей на него нагрузкой. Такие зависимости предложены В.В. Кацигиным [10], M. Bekker [11], в работах [12–16] и др. В настоящее время для моделирования взаимодействия движителя мобильной машины с грунтом наиболее перспективным является использование метода конечных элементов [17–20].
В данной статье рассматривается метод описания взаимодействия гусеницы с грунтом, в соответствии с которым силы, действующие на «активных» участках опорной поверхности, рассчитываются с использованием конечно-элементного моделирования. В работе [21] приведены результаты моделирования взаимодействия трака с грунтом с помощью пакета программ LS-Dyna [22]. Расчеты выполнены для трака транспортной машины класса 10 тонн. В качестве примера на рис. 2 представлены конечно-элементные модели трака и грунтового массива, а также деформированное состояние грунта после погружения трака и сдвига в боковом направлении.
Численные методы моделирования
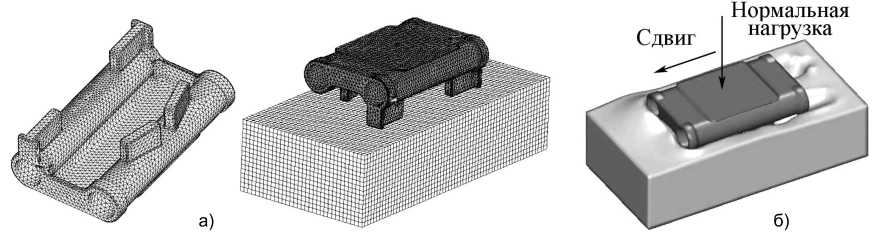
Рис. 2. Конечно-элементная модель трака и фрагмента грунта (а) и процесс нагружения (б)
В ходе исследований выполнена серия расчетов, моделирующих процесс погружения трака в грунт под действием вертикальной нагрузки ( N) и последующий сдвиг в горизонтальной плоскости. Исследования проведены для различных видов грунта и для траков с различной высотой грунтозацепов. На рис. 3, а, б в качестве примера приведены зависимости сдвигающей силы от перемещения для сдвига трака в поперечном направлении при N = 10 кН для трех видов грунта и для траков с различной опорной поверхностью. Анализ результатов расчетов показал, что на слабом грунте, а также для траков с изношенными грунтозацепами сдвигающая нагрузка оказалась меньше, чем для стандартного трака, взаимодействующего с плотным грунтом. При моделировании сдвига трака в различных направлениях установлено, что для сдвига в продольном направлении требуется значительно большая нагрузка, чем в поперечном направлении. Если трак сдвигается под углом к продольной оси, направление силы может не совпадать с направлением перемещения. Этот результат иллюстрирует рис. 3, в, где изображены зависимости продольной составляющей нагрузки от поперечной при сдвиге трака в различных направлениях (стандартный трак, N = 10кН). Направление сдвига отмечено пунктирной линией. Представленные результаты объясняются наличием поперечно расположенных грунтозацепов на опорной поверхности трака.
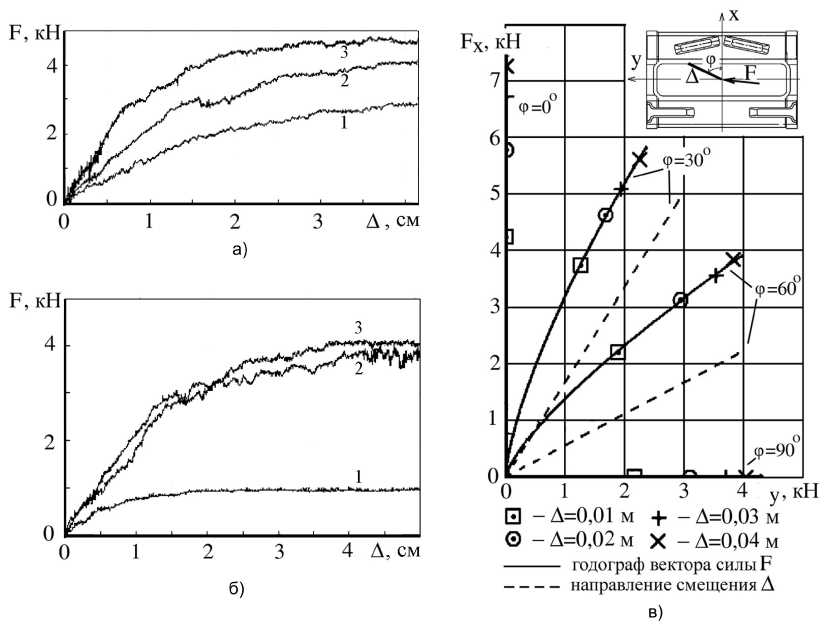
Рис. 3. Результаты моделирования взаимодействия трака с грунтом: а – зависимости боковой силы от бокового смещения трака: 1 – супесь, 2 – суглинок, 3 – глина, целина; б – зависимости боковой силы от бокового смещения трака (грунт – суглинок): 1 – трак с полностью изношенными грунтозацепами, 2 – трак с наполовину изношенными грунтозацепами, 3 – стандартный трак;
в – зависимости смещения трака от сдвигающей силы
По результатам расчетов получены аппроксимирующие выражения, позволяющие вычислить сдвигающую силу F p и угол между направлениями этой силы и смещения ^ :
N A m ( ф |
F p ( 5 , N , ф) =
A I • F max (ф) 'Г1 - еХР(- С (ф) ' 5 ) ] , ^ ( ф ) = c l + c 2 Ф + c з Ф 2 + c 4 Ф 3 , (1)
где 5 - поперечное смещение трака; ф - угол между продольной осью и направлением перемещения; A, m , c , c 1 , c 2, c 3 и с 4 - константы, определяемые по результатам конечно-элементных расчетов для различных видов грунта и траков с различной опорной поверхностью. Также получены зависимости, описывающие распределение вертикальной катковой нагрузки между траками, образующими «активный» участок.
Моделирование криволинейного движения машины
В [1] предложена математическая модель, описывающая динамику транспортной гусеничной машины при прямолинейном и криволинейном движении. Машина рассматривается как единая динамическая система, включающая подрессоренный корпус и силовую установку. Учтены нелинейности характеристик основных элементов системы, реальная характеристика двигателя, а также изменение структуры трансмиссии при переключении передачи и работе механизма поворота. В качестве внешнего воздействия рассматриваются кинематическое возбуждение со стороны микропрофиля трассы и управляющие воздействия водителя (переключение передач, управление механизмом поворота). В процессе интегрирования уравнений движения математической модели [1] необходимо рассчитывать усилия ( F xij , F yj ), действующие на каждый «активный» участок со стороны грунта.
При движении машины каждый трак, находящийся на «активном» участке, перемещается относительно опорного катка. При этом вертикальная нагрузка, действующая на трак, продольное и боковое смещение непрерывно изменяются. На каждом j-м «активном» участке i-й опорной поверхности продольное и поперечное смещение l-го трака A^j■, А^ определяются следующими выражениями: Tl
Axj = j Vpi (t)dt, Ag = j vbij (t)dt,(2)
где T l - время движения трака по активному участку, vpi ( t ), vby ( t ) - скорости проскальзывания относительно грунта в продольном и поперечном направлениях. Значения T l и vby ( t ) можно получить из значений обобщенных координат модели:
T = L a ’ /( o R k ), V bij = у -a• l j ) , где m i - угловая скорость ведущего колеса, RBK - радиус ведущего колеса L a ) - расстояние от l- го трака до начала активного участка, a - угловая скорость машины при повороте, у - поперечная составляющая скорости центра тяжести машины, l jl ) - расстояние от центра тяжести машины до l- го трака в продольном направлении.
После расчета А^■ , A yj можно определить полное перемещение A j ) и его направление, по уравнениям (1) полную сдвигающую силу F p для каждого трака и ее направление, а затем значения F xj , F y g . Значения сил, действующих на каждый активный участок со стороны грунта, получают суммированием F xj , F y g по всем тракам активного участка:
KK ll xj ^ xy ’ УУ ^ УУ ’ l=1 l=1
где K - число траков на активном участке. Используемые при интегрировании уравнений движения математической модели значения силы Fc и момента сопротивления Mc (рис. 1, а) определяются выражениями: 2 n 2 n
F c = " ZZ F j . M c 11 L I F yj . (3)
i = 1 j = 1 i = 1 j = 1
где L j - продольная координата j- го активного участка.
Численные методы моделирования
На рис. 4 представлена схема сил, действующих в гусеничном обводе машины. Усилия в рабочей ( Tpi ) и свободной ( Tci ) ветвях гусеничного обвода i- го борта являются нелинейными функциями их деформаций ветвей upi , uci :
u pi = u p 0 + u to pi - s pi -A x i , uci = u c 0 + u to ci - s ci +^ x i , (4)
где u p 0 , uc о - деформации, вызванные предварительным натяжением; u to pi, u to ci - деформации, вызванные центробежными силами; spi , sci - вызванные относительным перемещением опорных катков, A x i - деформации, зависящие от продольного перемещения корпуса машины, поворота ведущего колеса и проскальзывания гусеницы относительно грунта. Значения u to pi , u to ci , spi , sci могут быть получены из обобщенных координат математической модели [1]. Значение A x i определяется при интегрировании уравнения:
A x i = Vx + 0,5 B ( - 1) i + 1 to- Vpi -to i • RBK , (5)
где V x - скорость центра тяжести машины в направлении продольной оси, to - угловая скорость (при повороте), vpi - скорость проскальзывания опорной поверхности относительно грунта, В -ширина колеи машины.
Методика расчета усилий в ветвях гусеничного обвода в зависимости от их деформаций представлена в [1].
При интегрировании уравнений движения математической модели использован алгоритм, в соответствии с которым расчеты на каждом шаге производятся в два этапа:
-
1. Интегрирование дифференциальных уравнений движения системы; натяжения ветвей Tpi , Tci рассчитывают в соответствии с их деформациями (4). При этом используют значения Fc , Mc и vpi , полученные на предыдущем шаге. Величина A x i определяется при интегрировании уравнения (5).
-
2. Производится расчет скорости продольного проскальзывания vpi и сил, действующих на опорную поверхность.
Значения сил F xij определяются суммированием F xj , которые, в свою очередь, зависят от перемещений трака относительно грунта A Xi )■ , A^ j (2). Поскольку в выражение (2) входит скорость продольного проскальзывания опорной поверхности относительно грунта vpi , силы F xij оказываются функциями vpi . Равновесие каждого гусеничного обвода (рис. 4) описывается следующим уравнением: n
T pi - T ci = ^ Fxij ( v pi ). (6)
j = 1
Решая это уравнение, можно найти значение vpi на данном шаге интегрирования. Затем определяют силы, действующие на активном участке и значения F c и M c , которые используются на следующем шаге интегрирования.
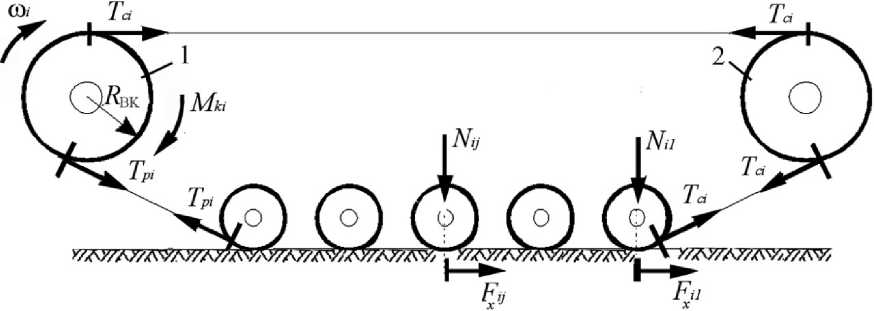
Рис. 4. Нагрузки, действующие в гусеничном обводе Результаты расчетов
Представленный алгоритм был использован при реализации математической модели гусеничной машины [1]. Выполнена серия расчетов движения машины класса 10 тонн по трассам с различными характеристиками грунта, а также тестовые расчеты, моделирующие поворот с фиксированным радиусом. В качестве примера на рис. 5 представлены траектория движения и процесс изменения момента сопротивления повороту при моделировании криволинейного движения машины с включенным фиксированным радиусом механизма поворота. Расчеты выполнены для гусениц, траки которых имеют грунтозацепы номинальной высоты, а также для траков с изношенными грунтозацепами. В случае изношенных грунтозацепов радиус поворота оказался больше, а момент сопротивления меньше, что объясняется худшими сцепными свойствами гусеницы в таком случае.
На рис. 6 приведены зависимости момента сопротивления от радиуса поворота, полученные для двух типов грунта с помощью предложенной модели. В соответствии с этими данными с увеличением радиуса поворота момент сопротивления снижается, при этом на плотном грунте он оказывается больше, чем на слабом. Характер представленных зависимостей хорошо согласуется с экспериментальными данными. Коэффициент сопротивления повороту, определенный при расчете процесса криволинейного движения с постоянным радиусом на ровной поверхности, оказывается близок к приводимым в литературе значениям для рассматриваемого грунта.
Рис. 5. Результаты моделирования поворота машины:
1 – стандартная гусеница, 2 – гусеница с изношенными грунтозацепами
Рис. 6. Зависимости момента сопротивления от радиуса поворота: о – плотный грунт, + – слабый грунт
Численные методы моделирования
При использовании предлагаемой методики расчет горизонтальных составляющих сил, действующих на каждый «активный» участок со стороны грунта, производится в зависимости от текущего значения вертикальной нагрузки со стороны соответствующего опорного катка машины. При движении по трассе происходит непрерывное изменение катковых нагрузок, вызванное колебаниями корпуса и воздействием микропрофиля дороги. В связи с этим нагрузки F xij , F yij также непрерывно изменяются по случайному закону. При преодолении криволинейных участков происходит дополнительное перераспределение нагрузок между опорными катками, вызванное различным натяжением гусеничных лент забегающего и отстающего бортов, а также влиянием центробежных сил. В качестве примера на рис. 7 представлено распределение вертикальных, продольных и боковых нагрузок, действующих на активных участках, при прямолинейном и криволинейном движении по ровному участку дороги. Рассматривается машина с задним расположением ведущих колес. При движении по прямолинейному участку нагрузки, действующие на «активные» участки правого и левого борта, одинаковы, а поперечные составляющие F yij отсутствуют. На криволинейном участке происходит перераспределение вертикальных нагрузок; в связи со значительным увеличением натяжения гусеничных лент задний опорный каток забегающего борта и передний каток отстающего борта отрываются от грунта. На остальных активных участках происходит перераспределение нагрузок и возникают силы F yij , формирующие сопротивление повороту гусеничной машины.
Рис. 7. Нагрузки в активных участках опорной ветви (значения в Ньютонах):
1 – прямолинейное движение, 2 – криволинейное движение
Заключение
Представленная в статье модель взаимодействия гусеницы с грунтом используется как один из элементов математической модели, описывающей движение машины по трассе. При этом в процессе интегрирования дифференциальных уравнений движения происходит непрерывный расчет сил, возникающих в контакте гусеницы с грунтом в соответствии с текущими значениями вертикальных нагрузок, действующих на опорные катки машины, усилий в рабочей и свободной ветвях гусеничного обвода и другими факторами. Использование результатов конечноэлементного моделирования взаимодействия траков с опорной поверхностью позволяет учитывать влияние на результаты расчетов свойств грунта и формы опорной поверхности гусеницы.
Применение предложенного подхода позволяет повысить точность моделирования движения гусеничной машины по трассе и расчета процессов изменения нагрузок, действующих на элемен- ты ее ходовой системы. Процессы изменения нагрузок, действующих на опорные катки и балансиры машины, в дальнейшем используются для получения расчетных оценок их долговечности.
Список литературы Расчет процесса криволинейного движения транспортной машины на основе конечно-элементного моделирования взаимодействия гусеницы с грунтом
- Березин, И.Я. Моделирование процесса эксплуатации при имитационных ресурсных испытаниях мобильной техники/И.Я. Березин, А.А. Абызов//Сб. науч. трудов МАДИ, 2000. -С. 56-74.
- Абызов, А.А. Расчетная оценка нагруженности и прогнозирование ресурса элементов ходовой части быстроходных гусеничных машин/А.А. Абызов, И.Я. Березин//Актуальные проблемы защиты и безопасности: труды 13 Всерос. науч.-практ. конф. -СПб.: НПО Спецматериалов. -2010. -Т. 3. -С. 119-127.
- Савочкин, В.А. Статистическая динамика транспортных и тяговых гусеничных машин/В.А. Савочкин, А.А. Дмитриев. -М.: Машиностроение, 1993. -235 с.
- Избранные труды А.О. Никитина. Сборник научных трудов. -М.: Изд-во МАДИ (ТУ), 1993. -116 с.
- Опейко, Ф.А. Математическая теория трения/Ф.А. Опейко. -Минск: Наука и техника, 1971. -149 с.
- Гуськов, В.В. Теория поворота гусеничных машин/В.В. Гуськов, А.Ф. Опейко. -М.: Машиностроение, 1984. -168 с.
- Трояновская, И.П. Взаимодействие гусеничного движителя с грунтом на повороте/И.П. Трояновская//Тракторы и сельхозмашины. -2007. -№ 12. -С. 19-20.
- Troyanovskaya, I.P. Forses of friction at the wheel-to-ground contact in a turning vehicle/I.P. Troyanovskaya, B.M. Pozin//Procedia Engineering. -2015. -Vol. 129. -P. 156-160.
- Красненьков, В.И. Математическая модель криволинейного движения транспортной гусеничной машины по деформируемому основанию/В.И. Красненьков, С.А. Харитонов, А.В. Шумилин//Изв. вузов. Машиностроение. -1989. -№ 11. -С. 94-99.
- Кацыгин, В. В. Основы теории выбора оптимальных параметров сельскохозяйственных машин и орудий/В.В. Кацыгин//Вопросы сельскохозяйственной механики. -1964. -Т. 13 -С. 31-64.
- Bekker, M.G. Theory of Land Locomotion/M.G. Bekker. -University of Michigan Press, 1956. -515 p.
- Wong, J.Y. Theory of ground vehicles/J.Y. Wong. -3rd ed. -John Wiley & Sons, 2001. -528 p.
- Matej, J. Tracked mechanism simulation of mobile machine in MSC.ADAMS View/J. Matej//Research in agricultural engineering. -2010. -Vol. 56. -No. 1. -P. 1-7.
- Adams Tracked Vehicle (ATV) Solution. Create, modify, and simulate realistic 3D models of tracked vehicles in adams. Available at: http://www.mscsoftware.com/Submitted-Content/Resources/TK_Services-ATV_LTR_w.pdf (дата обращения: 20.11.2018).
- Баловнев, В.И. Моделирование процессов взаимодействия со средой рабочих органов дорожно-строительных машин/В.И. Баловнев. -М.: Высш. шк., 1981. -335 с.
- Grecenko, А. Re-examined principles of thrust generation by a track on soft ground/А. Grecenko//Journal of Terramechanics. -2007. -No. 44. -P. 123-131.
- Asaf, Z. Evaluation of Link-Track Performances Using DEM/Z. Asaf, D. Rubinstein, I. Shmulevich//Journal of Terramechanics. -2006. -No. 43. -P. 141-161.
- Zhang, R. Simulation on Mechanical Behavior of Cohesive soil by Distinct Element Method/R. Zhang//Journal of Terramechanics. -2006. -No. 43. -P. 303-316.
- Hambleton, J.P. Modeling wheel-induced rutting in soils: Indentation/J.P. Hambleton, A. Drescher//Journal of Terramechanics. -2008. -No. 45. -P. 201-211.
- Maclaurin, B. A skid steering model with track pad flexibility/B.A. Maclaurin//Journal of Terramechanics. -2007. -No. 44. -P. 95-110.
- Абызов, А.А. Использование метода конечных элементов для моделирования взаимодействия гусеницы с грунтом при криволинейном движении машины/А.А. Абызов//Труды 15 Всерос. науч.-практ. конф. «Актуальные проблемы защиты и безопасности». Т. 3: Бронетанковая техника и вооружение. -СПб., 2012. -C. 184-190.
- LS-DYNA user's manual. Version970. -USA: Livermore Software Technology Corp., 2003. -1564 p.
