Расчет вращающего момента электромеханического привода трамвайного пантографа

Автор: Лопатин Борис Александрович, Казарцев Дмитрий Николаевич
Рубрика: Расчет и конструирование
Статья в выпуске: 1 т.13, 2013 года.
Бесплатный доступ
Рассмотрен расчет вращающего момента электромеханического привода плоского трехзвенного рычажного механизма трамвайного пантографа. Механизм предназначен для осуществления токосъема и электропитания трамваев от контактной сети. В процессе подъема и опускания механизма необходимо обеспечить требуемый закон изменения вращающего момента в зависимости от угла поворота ведущего звена.
Плоский рычажный механизм, электромеханический привод, пантограф
Короткий адрес: https://sciup.org/147151606
IDR: 147151606 | УДК: 621.336.322
Torque of electromechanical actuator for tram pantograph calculation
Electromechanical drive torque of the 3-bar planar lever mechanism of a pantograph is designated for tram current pick-off and electric power supply from the contact system. In the process of lifting and lowering of the mechanism it is necessary to provide the torque change law required depending on the turning angle of adriving bar.
Текст научной статьи Расчет вращающего момента электромеханического привода трамвайного пантографа
Для осуществления токосъема и электропитания трамваев, производимых Усть-Катавским вагоностроительным заводом, применяется трехзвенный рычажный механизм, называемый в дальнейшем пантографом (рис. 1).
Пантограф прижимается к контактному проводу за счет пружины растяжения 1, соединенной цепью 2 с кулачком 3, жестко закрепленным на рычаге О 1 А. Для обеспечения постоянного усилия прижатия контактных пластин пантографа к контактному проводу при различном угловом положении ведущего звена О1А необходимо знать профиль кулачка, который будет обеспечивать от усилия пружины требуемое значение момента ведущего звена О 1 А пантографа.
Целью данной работы являлось определение зависимости вращающего момента M 1 привода от угла поворота ф 1 ведущего звена механизма.
Составим схему сил, действующих на элементы пантографа в процессе его движения, и покажем векторы скоростей точек приложения сил (рис. 2).
Запишем уравнение возможных мощностей [1] для произвольного положения механизма:
M 1 -Ю 1 - G 1 • V 1 • cos ф 1 - G 2 • V 2 • cos ф 2 - G 3 • V 3 • cos ф 3 - ( P + G ) • V 0 • cos ф 0 = 0 . (1)
Вычислим углы, определяющие положение звеньев механизма в зависимости от угла пово- рота ф1 ведущего звена.
Постоянный угол
Р = arctg — .
a
Расстояние между опорами d = O 1 • O 2 = V a 2 + b 2 .
Из треугольника O 1 AO 2
k = 12 + d2 - 211 • d • cos (ф1 + p).
Из треугольника O 2 AB :
P 1 = arccos
' k2 +122 - C2' l 2 k •12 J
в 3 = arccos
' k2 + C2 -122' l 2 k • C J
В треугольнике O 1 AO 2 :
d • sin (ф1 + Р)Л k j
P 2 = 180 °-ф 1 -p-p 5 .
-
(5)(6)
(7)(8)
Расчет и конструирование
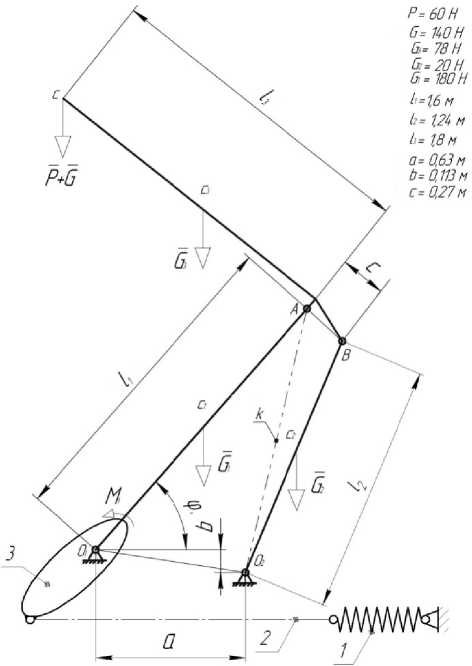
Рис. 1
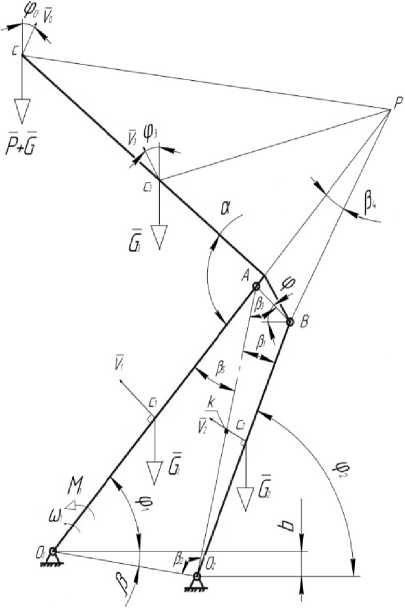
Рис. 2
Угол поворота звена O 2 B относительно горизонтали
Ф2 = 180°-Р-Р1 —в2.
Угол наклона звена BC относительно горизонтали
Ф = 180°-в 1 -ф2-р3 .
Точка P является мгновенным центром скоростей (МЦС) звена BC , тогда угол между звеньями O 1 A и O 2 B :
₽4 =Ф2 -Ф1, угол между звеньями O1A и BC: а = ф1 + ф .
Из треугольника O 1 PO 2 вычислим расстояния от опор конструкции до мгновенного центра скоростей P :
O 1 P =
d • sin (в2 + в1)
O2 P =
sin в 4
d • sin(ф1 + в) sin в4
;
.
Вычислим расстояния от точек приложения сил д о МЦС звена BC :
AP = O 1 P - 1 1 ;
BP = O 2 P - l 2 ;
PC = AP 2 + 1 3 2 - 2 AP • 1 3 • cos ( 180'
1 °-а);
PC 3 = JAP 2 + ( 0,5 l 3 ) 2 - 2 AP • 0,5 1 3 • cos ( 180 ° - а ) .
-
(15)(16)(17)
Лопатин Б.А., Казарцев Д.Н.
Расчет вращающего момента электромеханического привода трамвайного пантографа
Определим углы между направлениями сил и скоростей звена BC :
ф 3 = Ф 1 - arcsin
ф 0 = arcsin
0,5 1 3 • sin ( 180 °-ар
PC ,
13 • sin(180°-ар
PC
.
;
Выразим скорости точек приложения сил через угловую скорость ю 1 ведущего звена:
V i =® i • 0,5 l i ; ( 21 )
V =
ю 1 • 1 1 BP
V3 =
AP
« • 11
AP
1 • PC з ;
V = «11 • pc .
0 AP
Подставляя полученные выражения (15)–(24) в уравнение (1) и учитывая, что угол между на правлением скорости Vi и силы Gi равен ф1, а между вектором скорости V2 и силой G2 - ф2, получаем:
M 1
•го1
— G i • G> i • 0,5 1 i • cos ф 1 — G 2 •
ro i • 1 i • BP AP • 2
• cos ф 2
^^^^^^^B
— g m i • 1 i • PC з 3 AP
• cos ф3 - (P + G) •
roi • 1l • PC AP
• cos Ф 0
= 0.
Окончательно запишем уравнение зависимости вращающего момента от угла поворота ф 1
ведущего звена 1 механизма:
BP PC
Mi = Gl • 0,51i • cosФ1 + G2 • 0,5 1l • AP ■ cosф2 + G3 • 1l • AP■ cosф3 +
PC
+( P + G )• 11 • AP ■ cos Ф0-
Вычисляя вращающий момент, в заданном диапазоне изменения угла поворота ведущего звена, принимая силу реакции контактного провода Р = 0, пренебрегая силами трения в шарнирах, получаем график зависимости момента привода пантографа М П = M l ( ф 1 ) (рис. 3).
По результатам расчета был подобран профиль кулачка передаточного механизма привода пантографа, учитывающий момент от силы упругости пружины, и обеспечивающий требуемое изменение вращающего момента привода пантогра-
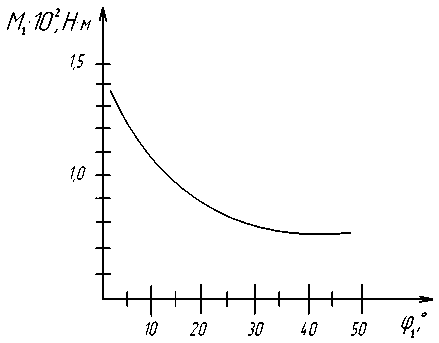
Рис. 3
фа, при изменении угла поворота ведущего звена от 2 до 48°.
Список литературы Расчет вращающего момента электромеханического привода трамвайного пантографа
- Тарг, С.М. Курс теоретической механики: учебник для втузов/С.М. Тарг. -13-е изд., стер. -М.: Высш. шк., 2009. -С. 357-367.
