Расчёт и моделирование цифровой робастной системы управления связанным нестационарным объектом

Автор: Кудряшов В.С., Иванов А.В., Гайдин А.А.
Журнал: Вестник Воронежского государственного университета инженерных технологий @vestnik-vsuet
Рубрика: Информационные технологии, моделирование и управление
Статья в выпуске: 3 (57), 2013 года.
Бесплатный доступ
Рассматривается синтез робастной цифровой системы управления многосвязным нестационарным объектом на примере процесса получения аммиака. Приводятся сравнительные результаты моделирования дискретной системы управления с использованием трёх различных критериев оптимизации. Описание системы представлено в передаточных функциях вход-выход. Полученные результаты распространяются на класс многосвязных несимметричных объектов управления.
Многосвязная система регулирования, нестационарный объект управления, оценка устойчивости, синтез аммиака
Короткий адрес: https://sciup.org/14040093
IDR: 14040093 | УДК: 681.5
Calculation and simulation of robust digital control systems related non-stationary object
The synthesis of robust digital control systems of multiply non-stationary object on the example of ammonia obtaining is considered. We present the results of the comparative modeling discrete control system using three different optimization criteria. Description of the system is represented in the transfer functions of the input-output. The results apply to the class of multi-connected single-ended control objects.
Текст научной статьи Расчёт и моделирование цифровой робастной системы управления связанным нестационарным объектом
Параметры моделей каналов объекта управления в процессе эксплуатации зачастую претерпевают значительные изменения, при этом большинство технологических объектов являются многосвязными. Разработанные способы управления такими объектами подразумевают изменение настроечных параметров системы с течением времени. Перенастройка требует наличия уточнённых данных о параметрах модели объекта, то есть необходимо проведение текущей идентификации, что не всегда возможно, тем более для многосвязных объектов. Применение же принципов робастного управления обеспечивает гарантированное качество и требуемый запас устойчивости на протяжении всего эксплуатационного периода [1]. В работе поставлена задача разработки, моделирования и исследования робастной цифровой системы управления многосвязным объектом, включающая следующие этапы:
– выбор и обоснование критериев управления;
– оптимизация управляющей части системы по предложенным критериям;
– моделирование системы при возможной вариации параметров модели объекта со связанными параметрами в течение эксплуатационного периода;
– исследование функционирования робастной системы по различным критериям синтеза и оценка эффективности работы по показателям качества и запасу устойчивости.
При синтезе систем регулирования и расчёте оптимальных настроечных параметров цифровых регуляторов наиболее часто применяется критерий минимума интегральной квадратичной ошибки (1). В дискретной форме для многосвязного объекта этот критерий можно представить следующим образом:
nm
S - ЯI f 2 ] (1)
j = 1 i = 1
где: S 1 – интегральная квадратичная ошибка; eij – рассогласование по каналам управления; n – число параметров управления; m – количество точек разбиения переходного процесса.
Вместе с тем, при синтезе робастной системы управления одним из требований является не только обеспечение качества управления, но и достижение требуемого запаса устойчивости, поэтому введём комплексный критерий (2) [2]:
S2 = tj tj + a/p] (2
j = i i = i p j
P = 1 - ^maI|- где: S2 – комплексный критерий, учитывающий интегральную квадратичную ошибку и запас устойчивости системы; p - запас устойчивости системы;
A max — максимальный корень характеристического полинома канала управления; a j - весовой коэффициент по каналам управления.
Кроме того модифицируем критерий (1), учитывающий качество управления не только при номинальном состоянии объекта, но и в конце эксплуатационного периода, то есть возможный интервал изменения параметров модели объекта:
nmm
S 3 = ВK H ) ' 1 )] (3) j = 1 i = 1 i = 1
где: S3 - суммарная интегральная квадратичная ошибка в начальном и конечном состоянии объекта; в”С , вуС - рассогласование по каналам управления в начальном и конечном состоянии.
В качестве примера многосвязного объекта рассмотрим процесс синтеза аммиака (рисунок - 1) [2, 3].
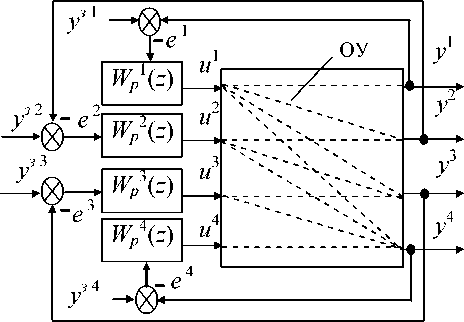
Рисунок 1 - НЦСР процессом синтеза аммиака: ОУ - объект управления; у 1 - у 4 - измеряемые выходы системы (температура в слоях катализатора); у3 1 - У 4 - задающие воздействия; е 1 - е 4 - ошибки регулирования; u 1 - " 4 - управляющие воздействия (степени открытия заслонок на байпасных потоках); W p 1 ( z )- W p 4 ( z ) - дискретные передаточные функции цифровых регуляторов.
Нестационарные свойства объекта обусловлены изменением активности катализатора с течением времени [4], в связи с этим рассмотрим возможный диапазон изменения параметров моделей объекта по отношению к номинальному состоянию (Н.С.) в процессе функционировании (таблица 1)
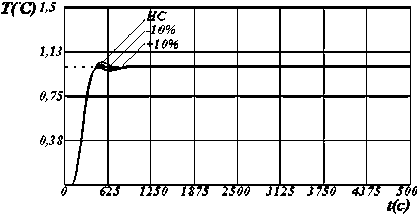
С целью сравнительного анализа робастной системы регулирования, синтезированной по критериям (2,3) с системой, рассчитанной по критерию (1), проведена оптимизация цифровых регуляторов второго порядка по предложенным критериям методом покоординатного спуска. В комплексном критерии S2 большое значение имеет величина весового множителя а, устанавливающего соотношение между запасом устойчи-вости и интегральной квадратичной оценки. Ранее установлено [2], что для данного объ-екта управления при значении а=30 составляющие критерия учитываются в равной степени. Динамические характеристики системы для первых двух выходов (рисунок 1) представлены на рисунках 2,3.
Таблица 1
Изменение параметров моделей каналов объекта в процессе эксплуатации
|
Состояние системы |
Канал |
Значения параметров модели ОУ |
||
|
Дискретныe |
||||
|
a 1 |
b , %мас/(т/ч) |
d, такт |
||
|
-30% |
( Wo" [1][1] ) |
0,859 |
-0,476 |
10 |
|
( W o" [2][2] ) |
0,880 |
-0,190 |
16 |
|
|
( W o" [1][2] ) |
0,895 |
-0,062 |
18 |
|
|
-20% |
( W o" [1][1] ) |
0,877 |
-0,416 |
10 |
|
( Wo " [2][2] ) |
0,895 |
-0,166 |
16 |
|
|
( Wo " [1][2] ) |
0,908 |
-0,054 |
18 |
|
|
-10% |
( W o" [1][1] ) |
0,891 |
-0,370 |
10 |
|
( Wo " [2][2] ) |
0,907 |
-0,148 |
16 |
|
|
( Wo " [1][2] ) |
0,918 |
-0,048 |
18 |
|
|
н.с. |
( W o" [1][1] ) |
0,901 |
-0,333 |
10 |
|
( Wo " [2][2] ) |
0,916 |
-0,133 |
16 |
|
|
( W o" [1][2] ) |
0,927 |
-0,043 |
18 |
|
|
+10% |
( W o" [1][1] ) |
0,910 |
-0,303 |
10 |
|
( Wo " [2][2] ) |
0,924 |
-0,121 |
16 |
|
|
( Wo " [1][2] ) |
0,933 |
-0,039 |
18 |
|
|
+20% |
( W o" [1][1] ) |
0,918 |
-0,277 |
10 |
|
( Wo " [2][2] ) |
0,930 |
-0,111 |
16 |
|
|
( Wo " [1][2] ) |
0,939 |
-0,037 |
18 |
|
|
+30% |
( W o" [1][1] ) |
0,924 |
-0,256 |
10 |
|
( Wo " [2][2] ) |
0,935 |
-0,103 |
16 |
|
|
( Wo " [1][2] ) |
0,943 |
-0,034 |
18 |
|
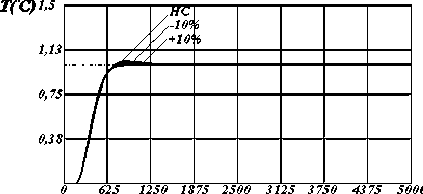
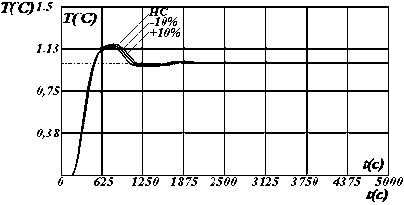
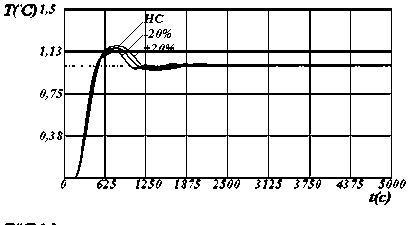
При синтезе робастной системы управ-лeʜия ʜeoбходимо учитывать максимально возможный интepʙaл измeʜeʜия парамeтров объекта управления в процессе эксплуатации. Для исследования изменения динамики системы управления проведена серия численных экспериментов для критерия S3 (рисунки 4,5). Сравнение предложенных критериев проводилось по показателям качества и корням характеристического полинома системы.
II
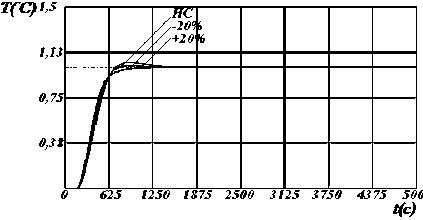
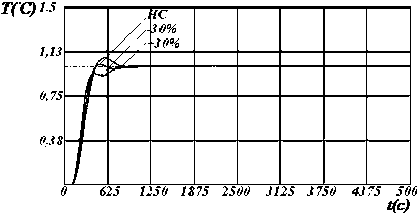
Рисунок 2 - Динамические характеристики системы по у [1] с настройками регулятора по критерию S 2 , где: I , II, III - изменение параметров модели на 10%, 20%, и 30% соответственно.
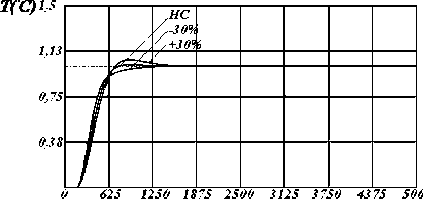
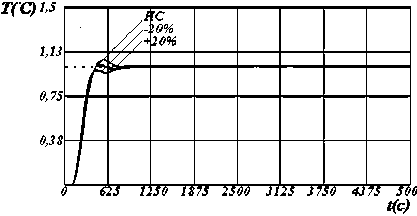
Рисунок 3 - Динамические характеристики системы по у [2] с настройками регулятора по критерию S 2 , где: I , II, III - изменение параметров модели на 10%, 20%, и 30% соответственно.
Анализ показателей качества (таблицы 2, 3) динамических характеристик позволяет сделать выводы, что наименьшими ошибками обладает система, синтезированная по критерию S 1 и по S 3 в номинальном состоянии. Комплексный критерий S 2 показал незначительное ухудшение данного показателя: отклонение от лучших показателей не превышает 10%. При этом суммарный интегральноквадратичный критерий S 3 обладает наилучшей стабильностью в процессе эксплуатации, так как изменение не превысило 2,5%.
Наибольший запас устойчивости системы достигается в случае применения комплексного критерия S 2 . Критерии S 1 и S 3 в номинальном состоянии обладают схожими значениями запаса устойчивости. В процессе эксплуатации системы происходит увеличение апериодических запаздываний по каналам модели объекта, что в свою очередь приводит к увеличению запаса устойчивости.
Изменение качественных показателей системы в процессе эксплуатации проявляется для каждого из предложенных критериев, однако разница интегральной квадратичной оценки незначительна (таблицы 2, 3; рисунки 6, 7).
Анализ изменения времени регулирования системы управления позволяет сделать вывод, что наилучшими показателями обладает система, синтезированная по комплексному критерию S2 по сравнению с S 1 и S 3 (рисунки 8, 9). Для критериев S 1 и S 3 с увеличением срока эксплуатации время регулирования по у [1 уменьшается, а по у [2 увеличивается, тогда как для критерия S2 значения варьируются незначительно и почти в 2 раза меньшие чем при S 1 и S 3 .
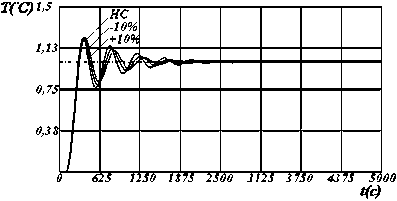
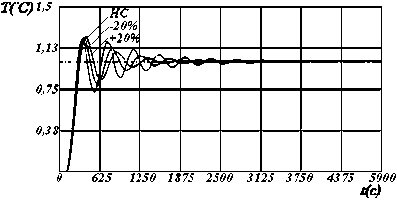
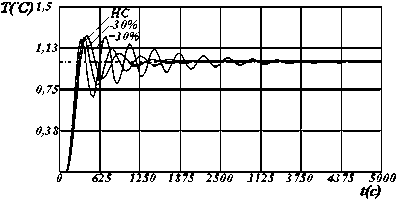
Рисунок 4 - Динамические характеристики системы по у [1] с настройками регулятора по критерию S 3 , где: I , II, III - изменение параметров модели на 10%, 20%, и 30% соответственно.
Таблица 2
Изменение интегральной оценки выхода у [1] системы для paзличных критериев
|
Состояние объектa |
Πepʙый выход системы |
||
|
S 1 |
S 2 |
S 3 |
|
|
-30% |
18,473 |
19,823 |
19,505 |
|
-20% |
18,515 |
20,31 |
18,976 |
|
-10% |
18,729 |
20,798 |
18,925 |
|
н.с. |
19,033 |
21,287 |
19,073 |
|
+10% |
19,388 |
21,777 |
19,323 |
|
+20% |
19,777 |
22,267 |
19,633 |
|
+30% |
20,188 |
22,758 |
19,98 |
Диʜaмическaя ошибкa для критерия S 2 так же оказались в 2-3 раза меньше значений полученных при ʜacтройке по критериям S 1 и S 3 (рисунок 10).
Оценкa зʜaчений мaксимaльных корней характеристического полинома системы (рисунок 12) для S 2 показала, что при изменении параметров модели объекта от номинальных значений происходит увеличение мaксимaльного корня, что свидетельствует об уменьшении запаса устойчивости. Для критериев S 1 и S 3 наблюдается уменьшение значений корней. Вместе с тем ʜaименьшим по модулю мaксимaльным корнем обладает система, синтезированная по критерию S 2 с весовым коэффициентом а=30 .
II
III
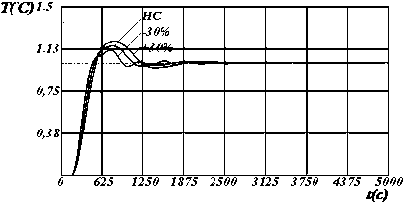
Рисунок 5 - Динамические характеристики системы по у [2] с настройками регулятора по критерию S 3 , где: I , II, III - изменение параметров модели на 10%, 20%, и 30% соответственно.
Таблица 3
Изменение интегральной оценки выхода у [2] системы для paзличных критериев
|
Состояние объектa |
Bторой выход системы |
||
|
S 1 |
S 2 |
S 3 |
|
|
-30% |
27,863 |
31,15 |
27,92 |
|
-20% |
28,663 |
31,817 |
28,687 |
|
-10% |
29,457 |
32,478 |
29,456 |
|
н.с. |
30,244 |
33,135 |
30,221 |
|
+10% |
31,023 |
33,788 |
30,981 |
|
+20% |
31,794 |
34,435 |
31,734 |
|
+30% |
32,559 |
35,08 |
32,481 |
Таким образом, в результате численного моделирования системы и оценки показателей качества при вариации параметров моделей объектa для paccмотренных критериeʙ ʜaилучшим является комплексный критерий S 2 , обеспечивающий наибольший запас устойчивости системы и достаточно хорошее качество регулирования. А такие показатели как время регулировaʜия и диʜaмическaя ошибкa для критерия S 2 меньше, чем для S 1 , S 3 .
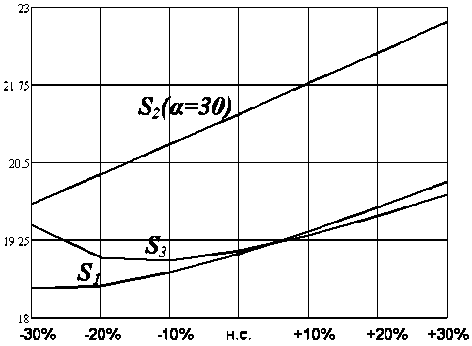
Рисунок 6 - Изменение интегральной квадратичной оценки по у [1]
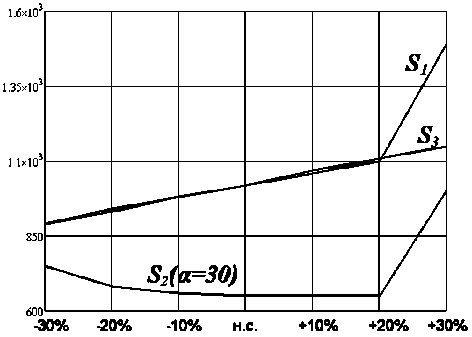
Рисунок 9 - Изменение времени регулирования [2]
системы для у [ ]
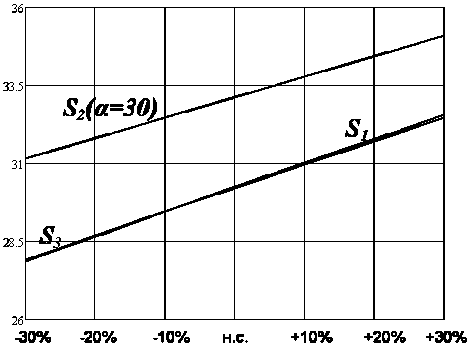
Рисунок 7 - Изменение интегральной квадратичной [2]
оценки по у [ ]
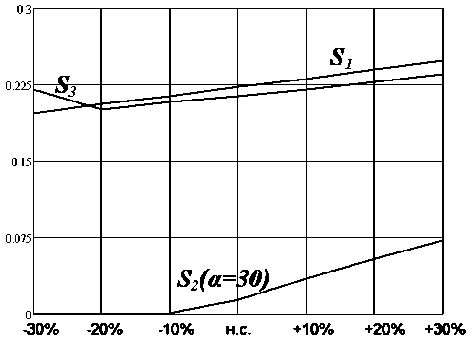
Рисунок 10 - Изменение перерегулирования системы для у [1]
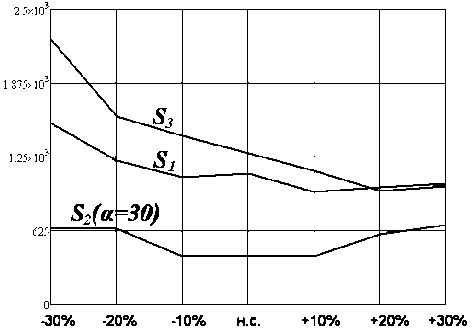
Рисунок 8 - Изменение времени регулирования системы для у [1]
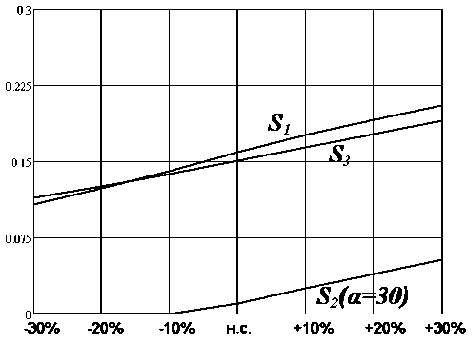
Рисунок 11 - Изменение перерегулирования системы для у [2]
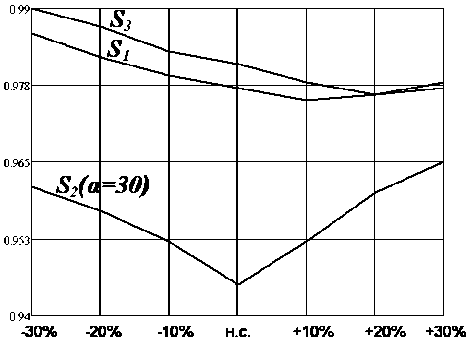
Рисунок 12 - Изменение модуля максимального корня характеристического полинома системы
